






 本文介绍了轨道六根数在描述二体问题中的作用,包括半长轴、离心率、轨道倾角等,并讨论了椭圆、双曲线和抛物线轨道的不同情况。通过数学公式展示了如何使用轨道六根数转换为位置速度矢量,以及如何从位置速度矢量反推轨道六根数。同时提供了一个Matlab函数,用于实现轨道六根数与位置速度矢量之间的相互转换。
本文介绍了轨道六根数在描述二体问题中的作用,包括半长轴、离心率、轨道倾角等,并讨论了椭圆、双曲线和抛物线轨道的不同情况。通过数学公式展示了如何使用轨道六根数转换为位置速度矢量,以及如何从位置速度矢量反推轨道六根数。同时提供了一个Matlab函数,用于实现轨道六根数与位置速度矢量之间的相互转换。
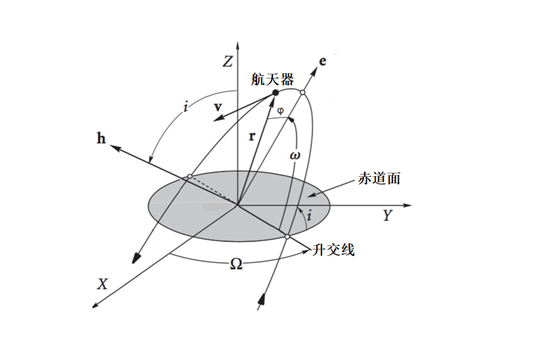
在二体问题中,轨道根数(orbital factors)是描述物体运动轨迹的简便形式。三维空间中,唯一确定物体轨迹需要六个参数,如位置矢量和速度矢量(均为三维)可共同确定物体轨迹。此外,用六个轨道根数也可描述它。通常的轨道六根数指的是:半长轴$a$、离心率$e$、轨道倾角$i$、近心点辐角$\omega$、升交点经度$\Omega$和真近点角$\varphi$。经过三角函数运算,它们能表示出物体所处特定位置和速度。
轨道六根数如图所示。
值得注意的是,椭圆和双曲线轨道拥有完整的六根数。而抛物线轨道中不存在半长轴$a$,而用半通径$p$替代。且抛物线离心率$e$恒为1,故仅需五个轨道根数来描述抛物线轨道。
而在圆轨道中,描述轨道仅需四个参数,一般将真近点角$\varphi$与近心点辐角$\omega$合并为纬度辐角$u$,同时离心率$e$为0,矢量不再有意义。故只需要四个。
轨道六根数转位置速度矢量
轨道坐标系经过三次方向余弦矩阵变换即可变为中心天体惯性系。第一次变换时,轨道平面绕参考坐标系z轴转过$-\Omega$,升交线与参考坐标系x轴重合;第二次变换时,轨道平面绕参考坐标系x轴转过$-i$,轨道平面正法向与参考坐标系z轴重合;第三次变换时,轨道平面绕参考坐标系z轴转过$-\omega$,离心率矢量与参考坐标系x轴重合;最终,在参考坐标系下,物体坐标为${\left[ {r\cos \varphi ,r\sin \varphi ,0} \right]^\prime }$。整个过程为欧拉角序列3-1-3。
同时,注意到位置矢量的大小仅是半通径$p$和真近点角的函数,而半通径可由半长轴和离心率求出,或直接给出:
$$r = \frac{p}{1 + e\cos \varphi }$$
最终有:
$$\hat r = {R_3}( - \Omega ){R_1}( - i){R_3}( - \omega )\left[ {\begin{array}{*{20}{c}}
{r\cos \varphi }\\
{r\sin \varphi }\\
0
\end{array}} \right]$$
$$\hat r = \frac{p}{1 + e\cos \varphi }\left[ {\begin{array}{*{20}{c}}
{\cos \Omega \cos (\omega + \varphi ) - \sin \Omega \sin (\omega + \varphi )\cos i}\\
{\sin \Omega \cos (\omega + \varphi ) + \cos \Omega \sin (\omega + \varphi )\cos i}\\
{\sin (\omega + \varphi )\sin i}
\end{array}} \right]$$
由于运动中除了$\varphi$,其余轨道根数均不变,且轨道六根数可唯一确定位置矢量,因此位置矢量是$\varphi$的函数。从而有:
$$\hat v = \frac{d\hat r}{d\varphi }\frac{d\varphi }{dt}$$
同时注意到真近点角的微分为:
\[\frac{d\varphi }{dt} = \frac{\sqrt \mu }{p^{3/2}}{(1 + e\cos \varphi )^2}\]
其中$\mu$是中心天体引力常数。
最后,有:
$$\hat v = \sqrt {\frac{\mu }{p}} \left[ {\begin{array}{*{20}{c}}
{ - \cos \Omega (\sin (\omega + \varphi ) + e\sin \omega ) - \sin \Omega (\cos (\omega + \varphi ) + e\cos \omega )\cos i}\\
{ - \sin \Omega (\sin (\omega + \varphi ) + e\sin \omega ) + \cos \Omega (\cos (\omega + \varphi ) + e\cos \omega )\cos i}\\
{(\cos (\omega + \varphi ) + e\cos \omega )\sin i}
\end{array}} \right]$$
位置速度矢量转轨道六根数
位置速度矢量转轨道六根数的过程是依照轨道六根数的定义进行的。
首先求半通径$a$。若物体的速度大小为$v$,离中心天体的距离为$r$,则:
\[a = {\left( {\frac{2}{r} - \frac{v^2}{\mu }} \right)^{ - 1}}\]
$a$应为有限正数。若求出$a$为无穷,则表明轨道为抛物线,可忽略此步;若求出$a$为负,则表明轨道为双曲线,需改变$a$的符号。
进一步求离心率矢量$\hat e$:
$$\hat e = \frac{1}{\mu }\left[ {\left( {v^2} - \frac{\mu }{r} \right)\hat r - \left( {\hat r \cdot \hat v} \right)\hat v} \right]$$
轨道六根数中的离心率为离心率标量,即$\hat e$的模。若$e$为零向量,则说明轨道为圆。
再计算角动量$\hat h$:
$$\hat h = \hat r \times \hat v$$
若已经认定轨道为抛物线,则依据:
\[p = \frac{h^2}{\mu }\]
求出抛物线的轨道根数之一,即半通径。
已知角动量和z轴单位矢量$\hat z$,轨道倾角$i$即可求:
$$\cos i = \frac{\hat z \cdot \hat h}{h}$$
再计算升交线矢量${\hat n}$:
$$\hat n = \hat z \times \hat h$$
近心点辐角$\omega$可由此计算:
$$\cos \omega = \frac{\hat n \cdot \hat e}{ne}$$
如果$\hat z \cdot \hat e > 0$,即离心率矢量与z轴正半轴夹角为锐角,那么$\omega < {180^ \circ }$。
升交点经度$\Omega$也可算出:
$$\cos \Omega = \frac{\hat n \cdot \hat x}{n}$$
若$\hat y \cdot \hat n > 0$,即升交线与y轴交角为锐角,则$\Omega < {180^ \circ }$。
最后是真近点角$\varphi$:
$$\cos \varphi = \frac{\hat e \cdot \hat r}{er}$$
如果$\hat r \cdot \hat v > 0$,即位置矢量与速度矢量之间夹角为锐角,则$\varphi < {180^ \circ }$。
由此,椭圆、抛物线或双曲线的轨道根数全部求出。
若轨道在离心率计算时已被认定为圆,则不必计算真近点角$\varphi$与近心点辐角$\omega$,而依照下式计算纬度辐角$u$:
\[\cos u = \frac{\hat n \cdot \hat r}{nr}\]
如果$\hat r \cdot \hat z > 0$,即物体在xy平面上方,则$u < {180^ \circ }$。
其他表示
在一般轨道中,除了上述的六个轨道根数的组合,轨道六根数还有其他组合方式。例如,真近点角$\varphi$可换为平近点角$M$或平经度$L$;升交点经度$\Omega$或近心点辐角$\omega$可换为近心点经度${\tilde \omega }$等。
附:Matlab实现互化
轨道六根数转位置速度矢量
function [Coordinate,V]=Classic_Coordinate(data,miu)
%/* Classic_Coordinate: convert orbit factors to velocity and location
% miu: GM of center body
% data: For ellipse and hyperbola: a;e;i;w;W;fai of transfer orbit
% %a:semi-major axis; e:eccentricity; i:inclination;
% %w:argument of periapsis; W:longitude of ascending node; fai:true anomaly.
% For parabola: p;i;w;W;fai of transfer orbit
% %p:semi latus rectum; i:inclination; w:argument of periapsis;
% %W:longitude of ascending node; fai:true anomaly.
% For circle: a;i;u;W; of transfer orbit
% %a:radius; i:inclination; u:argument of latitude;
% %W:longitude of ascending node;
% Coordinate:location
% V:velocity */
if length(data)==6 % ellipse and hyperbola
a=data(1);
e=data(2);
i=data(3);
w=data(4);
W=data(5);
fai=data(6);
p=abs(a*(1-e^2));
u=w+fai;
elseif length(data)==5 % parabola
p=data(1);
i=data(2);
w=data(3);
W=data(4);
fai=data(5);
u=w+fai;
else %circle
p=data(1);
e=0;
i=data(2);
w=0;
u=data(3);
W=data(4);
fai=0;
end
Coordinate=p/(1+e*cos(fai))*[cos(W)*cos(u)-sin(W)*sin(u)*...
cos(i) sin(W)*cos(u)+cos(W)*sin(u)*cos(i) sin(i)*sin(u)]';
V=(miu/p)^(0.5)*[-cos(W)*(sin(u)+e*sin(w))-sin(W)*(cos(u)...
+e*cos(w))*cos(i) -sin(W)*(sin(u)+e*sin(w))+cos(W)*(cos(u)+...
e*cos(w))*cos(i) sin(i)*(cos(u)+e*cos(w))]';
end
位置速度矢量转轨道六根数
function [data]=Coordinate_Classic(R,V,miu)
%/* Classic_Coordinate: convert orbit factors to velocity and location
% miu: GM of center body
% data: For ellipse and hyperbola: a;e;i;w;W;fai of transfer orbit
% %a:semi-major axis; e:eccentricity; i:inclination;
% %w:argument of periapsis; W:longitude of ascending node; fai:true anomaly.
% For parabola: p;i;w;W;fai of transfer orbit
% %p:semi latus rectum; i:inclination; w:argument of periapsis;
% %W:longitude of ascending node; fai:true anomaly.
% For circle: a;i;u;W; of transfer orbit
% %a:radius; i:inclination; u:argument of latitude;
% %W:longitude of ascending node;
% Coordinate:location
% V:velocity */
r=sqrt(dot(R,R));
if 2/r-dot(V,V)/miu~=0
a=1/abs(2/r-dot(V,V)/miu);
end
E=(dot(V,V)/miu-1/r)*R-dot(R,V)/miu*V;
e=sqrt(dot(E,E));
H=cross(R,V);
h=sqrt(dot(H,H));
p=h^2/miu;
Z=[0 ;0 ;1];
X=[1 ;0 ;0];
Y=[0 ;1 ;0];
N=cross(Z,H);
n=sqrt(dot(N,N));
i=acos(dot(Z,H)/h);
if e~=0
w=acos(dot(N,E)/n/e);
if dot(Z,E)<0
w=2*pi-w;
end
else
u=acos(dot(N,R)/n/r);
if dot(R,Z)<0
u=2*pi-u;
end
end
W=acos(dot(X,N)/n);
if dot(Y,N)<0
W=2*pi-W;
end
if e~=0
fai=acos(dot(E,R)/e/r);
if dot(R,V)<0
fai=2*pi-fai;
end
end
if 2/r-dot(V,V)/miu~=0
if e~=0
data=[a;e;i;w;W;fai];
else
data=[a;i;u;W];
end
else
data=[p;i;w;W;fai];
end
end

















 62
62

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









