







 这篇教程详细介绍了ABB工业机器人的CRobT和Offs功能函数。CRobT用于读取当前机器人位置数据,包括位置、方位和轴配置等信息。Offs指令则用于目标点的位置偏移,通过指定X、Y、Z轴的偏差量来精确设定目标位置。教程还提供了操作步骤和相关视频资源,适合学习者深入理解这两个关键指令。
这篇教程详细介绍了ABB工业机器人的CRobT和Offs功能函数。CRobT用于读取当前机器人位置数据,包括位置、方位和轴配置等信息。Offs指令则用于目标点的位置偏移,通过指定X、Y、Z轴的偏差量来精确设定目标位置。教程还提供了操作步骤和相关视频资源,适合学习者深入理解这两个关键指令。
本节要点
掌握CRobT和Offs功能函数的使用
要点解析
NO.1
CRobT指令
CRobT 指令:读取当前机器人位置数据。该函数返回 robtarget 值以及位置(x、y、z)、方位(q1 ... q4)、机械臂轴配置和外轴位置。
NO.2
Offs指令
Offs 指令:目标点位置偏移。为了精确确定目标点,可以采用函数offs。Offs(p,x,y,z)代表离p 点X 轴偏差量为 x,Y 轴偏差量为 y,Z 轴偏差量为z。
操作步骤
NO.1
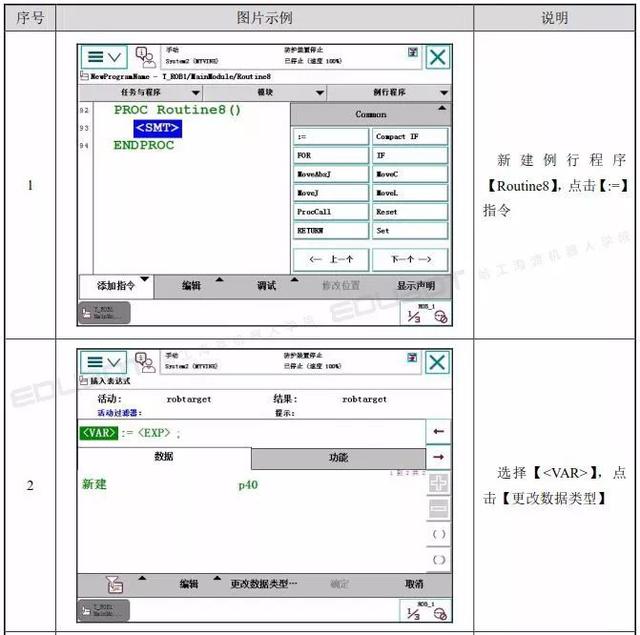
CRobT指令
CROBT 指令的操作步骤见下表。

 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









