







 本文介绍了如何利用Autoware和Calibration Tool Kit工具进行Robosense雷达与ZED相机的联合标定。首先,确保安装Autoware并完成ZED相机内参标定。然后,启动Autoware,回放包含雷达和相机数据的Bag文件,并启动Calibration Tool Kit。通过选择合适的图像和雷达话题,设置标定板参数,进行外参标定。经过捕获图像、点云,选择棋盘格区域,最终计算并保存标定结果。文章还提供了标定结果的测试方法和相关资源。
本文介绍了如何利用Autoware和Calibration Tool Kit工具进行Robosense雷达与ZED相机的联合标定。首先,确保安装Autoware并完成ZED相机内参标定。然后,启动Autoware,回放包含雷达和相机数据的Bag文件,并启动Calibration Tool Kit。通过选择合适的图像和雷达话题,设置标定板参数,进行外参标定。经过捕获图像、点云,选择棋盘格区域,最终计算并保存标定结果。文章还提供了标定结果的测试方法和相关资源。
一、安装 Autoware & ZED 内参标定 & 外参标定准备
之前的这篇文章:
Autoware 进行 Robosense-16 线雷达与 ZED 双目相机联合标定!dlonng.com记录了我用 Autoware 标定相机和雷达的过程,虽然用的不是 Calibration Tool Kit 工具,但是博客里面的以下章节也适用本次的 Calibration Tool Kit :
- 一、编译安装 Autoware-1.10.0
- 二、标定 ZED 相机内参
- 3.1 联合标定准备
如果你是第一次看这篇 Calibration Tool Kit 联合标定的博客,建议先按照之前的博客安装 Autoware、标定 ZED 内参和做好外参标定的准备(标定板,录制标定包等),最好用上篇博客的方法标定一次。
这篇博客我就直接开始介绍使用 Calibration Tool Kit 标定雷达和相机外参的过程!
二、Calibration Tool Kit 联合标定雷达和 ZED 相机
2.1 启动 Autoware
先启动 Autoware-1.10.0,启动过程中可能需要输入 root 密码:
# 1. 进入 autoware 的 ros 目录下
cd autoware-1.10.0/ros
# 2. source 环境,zsh 或 bash
source devel/setup.zsh[.bash]
# 3. 启动主界面
./run
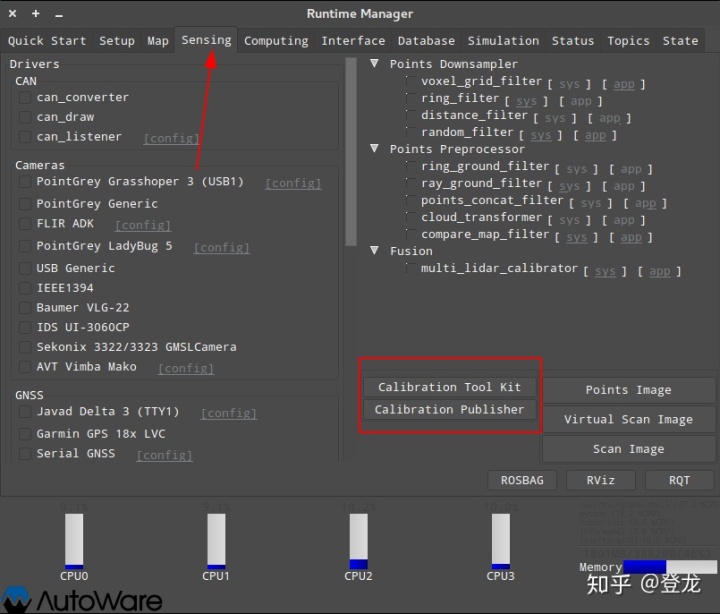
切换到 Sensing 选项卡:
2.2 回放雷达相机 Bag
这里回放时需要更改雷达的话题为 /points_raw,因为这个工具订阅的雷达主题是固定的:
rosbag play --pause xxx.bag /rslidar_points:=/points_raw
我用的 Robosense 雷达,发布的话题是 rslidar_points,这个回放默认暂停,防止跑掉数据,按空格继续或暂停。
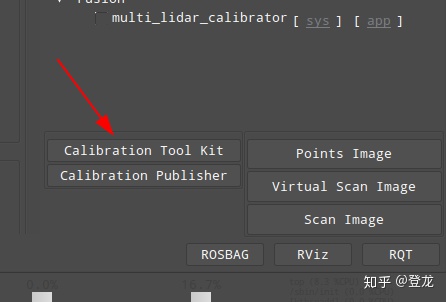
2.3 启动 Calibration Tool Kit
点击 Calibration Tool Kit 启动标定工具:
选择图像输入话题,我只用的 ZED 的左图像话题,如果没有相机话题,确保前面你已经回放了 bag&#
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









