






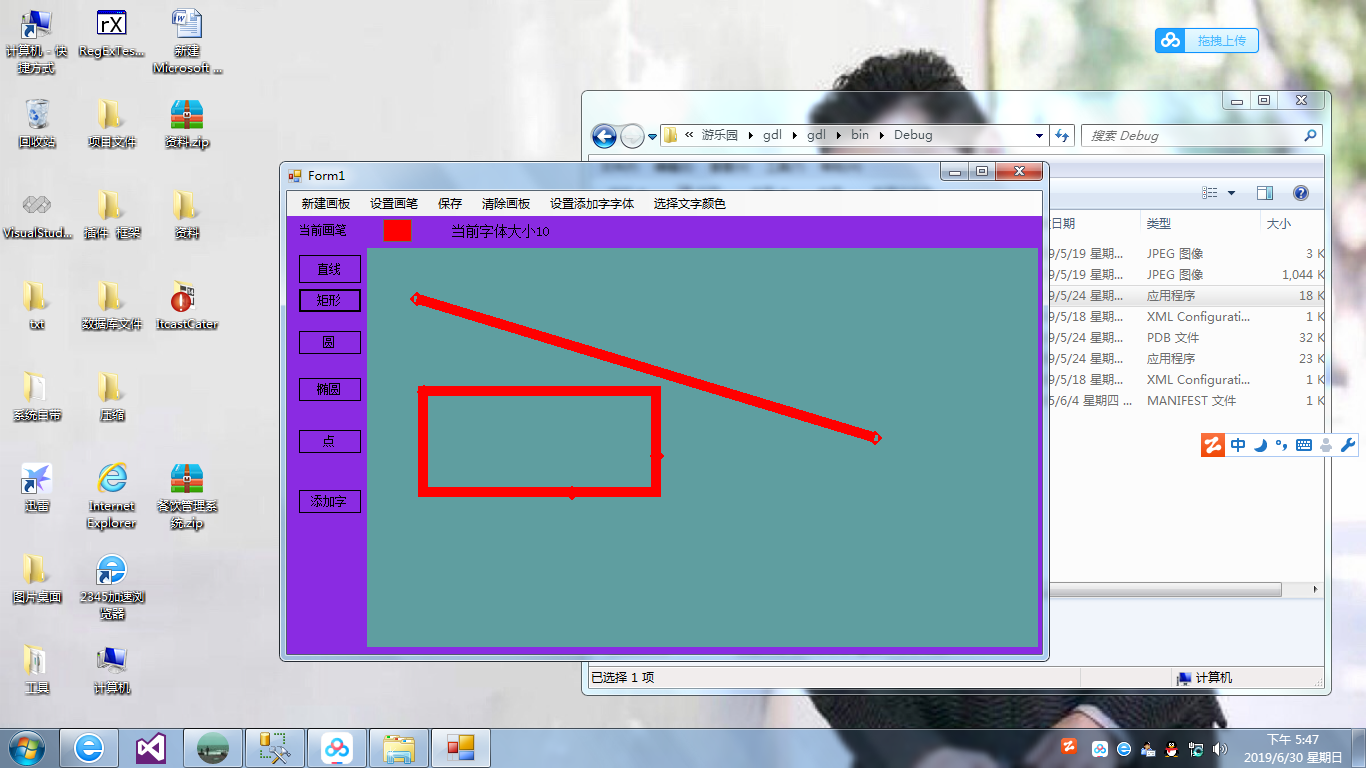
画图软件
资源下载此资源下载价格为2D币,请先登录
资源文件列表
gdl/.gitattributes , 2581
gdl/.gitignore , 3997
gdl/.git/config , 647
gdl/.git/description , 73
gdl/.git/HEAD , 23
gdl/.git/hooks/README.sample , 177
gdl/.git/index , 1168
gdl/.git/info/exclude , 113
gdl/.git/logs/HEAD , 350
gdl/.git/logs/refs/heads/master , 350
gdl/.git/ms-persist.xml , 150
gdl/.git/objects/0d/76fe4328089e5b63a9c4190badacfc35ef2624 , 89
gdl/.git/objects/0f/b2cbaebce46a3af9701ee1d99c938c898b44e4 , 1239
gdl/.git/objects/0f/d0f9d30ddb30e8e1ee16591e25140f8bbc2d95 , 719
gdl/.git/objects/1c/9a181a44b4f9a105f0dc71a40ad0284ab6a7c4 , 1863
gdl/.git/objects/1f/f0c423042b46cb1d617b81efb715defbe8054d , 751
gdl/.git/objects/39/645652af62950ebf3b28ec3a5400dcec30b1c4 , 186
gdl/.git/objects/49/6b1cd3135e62ced1ee9bc916a6581a8bbc9838 , 1129
gdl/.git/objects/54/f2e8e6fc9abd5be73147b6ede8f729fb14ee87 , 169
gdl/.git/objects/73/1f6de6c291e303814b02808f34140fe560e8e4 , 153
gdl/.git/objects/8b/7d42ff3df685df679e94a8f310ea40effb6520 , 480
gdl/.git/objects/8f/f16a428a864c5bc7de0f7819a9c2e87bcf2444 , 588
gdl/.git/objects/94/4f45672f146cf56457ada4f7561da7726361a2 , 314
gdl/.git/objects/a5/3873c1a508167159dfbdae84e6e119754648c7 , 208
gdl/.git/objects/af/7dbebbacef595e3089c01c05671016c21a8304 , 1604
gdl/.git/objects/b1/a4e5fffdf655c459c1c83c8ae8980d1081a9d3 , 223
gdl/.git/objects/b9/a4082a61a44eb7b8fb0d85e2370c4441b00f5c , 198
gdl/.git/objects/d6/fda37a0b0ef3c31c0fdced92f2e1d7e888d19f , 389
gdl/.git/objects/dc/485e3a68ff0d18f236ab3e800701afdb0f5819 , 192
gdl/.git/objects/e0/dbf52a5c87d73a3523474706a20c674f63c883 , 151
gdl/.git/refs/heads/master , 41
gdl/.vs/gdl/v14/.suo , 54784
gdl/gdl.sln , 976
gdl/gdl/App.config , 189
gdl/gdl/bin/Debug/11.jpeg , 2367
gdl/gdl/bin/Debug/111.jpeg , 1068286
gdl/gdl/bin/Debug/gdl.exe , 18432
gdl/gdl/bin/Debug/gdl.exe.config , 189
gdl/gdl/bin/Debug/gdl.pdb , 32256
gdl/gdl/bin/Debug/gdl.vshost.exe , 22696
gdl/gdl/bin/Debug/gdl.vshost.exe.config , 189
gdl/gdl/bin/Debug/gdl.vshost.exe.manifest , 490
gdl/gdl/Form1.cs , 13525
gdl/gdl/Form1.Designer.cs , 16773
gdl/gdl/Form1.resx , 6188
gdl/gdl/gdl.csproj , 3904
gdl/gdl/obj/Debug/DesignTimeResolveAssemblyReferences.cache , 1464
gdl/gdl/obj/Debug/DesignTimeResolveAssemblyReferencesInput.cache , 7192
gdl/gdl/obj/Debug/gdl.csproj.FileListAbsolute.txt , 717
gdl/gdl/obj/Debug/gdl.csproj.GenerateResource.Cache , 1012
gdl/gdl/obj/Debug/gdl.csprojResolveAssemblyReference.cache , 2384
gdl/gdl/obj/Debug/gdl.exe , 18432
gdl/gdl/obj/Debug/gdl.Form1.resources , 180
gdl/gdl/obj/Debug/gdl.pdb , 32256
gdl/gdl/obj/Debug/gdl.Properties.Resources.resources , 180
gdl/gdl/obj/Debug/TemporaryGeneratedFile_036C0B5B-1481-4323-8D20-8F5ADCB23D92.cs , 0
gdl/gdl/obj/Debug/TemporaryGeneratedFile_5937a670-0e60-4077-877b-f7221da3dda1.cs , 0
gdl/gdl/obj/Debug/TemporaryGeneratedFile_E7A71F73-0F8D-4B9B-B56E-8E70B10BC5D3.cs , 0
gdl/gdl/Program.cs , 515
gdl/gdl/Properties/AssemblyInfo.cs , 1332
gdl/gdl/Properties/Resources.Designer.cs , 2819
gdl/gdl/Properties/Resources.resx , 5612
gdl/gdl/Properties/Settings.Designer.cs , 1090
gdl/gdl/Properties/Settings.settings , 249















 313
313











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









