





一. 基本知识总结
1.线性系统满足叠加性和齐次性;
2.对呈现非线性特性的元件,通常使用“小信号”方法将这些元件线性化,这也是对电子线路和晶体管进行线性化等效处理的惯用方法;(在工作点处泰勒级数展开 )
3.通过拉普拉斯变换 ,可以得到特征方程、零点和极点。零点和极点都是特殊的频率点,在极点处Y(s)为无穷大;在零点处Y(s)为零。可以用图示法来表示零点和极点在复频域s平面上的分布,零-极点分布图刻画了系统时间相应的瞬态特性。
4.在对拉普拉斯变换进行处理的过程中,可以使用留数定理。
5.终值定理的使用条件是:Y(s)不能在虚轴和右半平面上存在极点,也不能在原点处存在多重极点,则可以使用公式:
6. 二阶系统的常用表达式与基本参数分析。对于一个二阶系统(质量块-弹簧-阻尼器系统)可以改写为
通过求解特征方程的根,
(1)当
(2)当
(3)当
7. 使用框图模型和信号流图模型来描述系统。
二. 基于matlab的仿真计算
- 动态方程解析解
对于质量块-弹簧-阻尼器系统,质量块的位移响应y(t)的零输入动态响应为:
这个是由系统的微分方程直接求解得到的解析解:
当y(0)=0.15m;
在matlab中输入命令:
% Unforced Response to an Initial Condition
% Generates Figure 2.41: Spring-mass-damper unforced response.
%
y0=0.15;
wn=sqrt(2);
zeta=1/(2*sqrt(2));
t=[0:0.1:10];
%
c=(y0/sqrt(1-zeta^2));
y=c*exp(-zeta*wn*t).*sin(wn*sqrt(1-zeta^2)*t+acos(zeta));
%
% Boundary Function
%
bu=c*exp(-zeta*wn*t);bl=-bu;
%
% Plot Unforced Response
%
plot(t,y,t,bu,'k--',t,bl,'k--'),grid
xlabel('Time (sec)'),ylabel('y(t) (meters)')
legend(['omega_n=',num2str(wn),' zeta=',num2str(zeta)])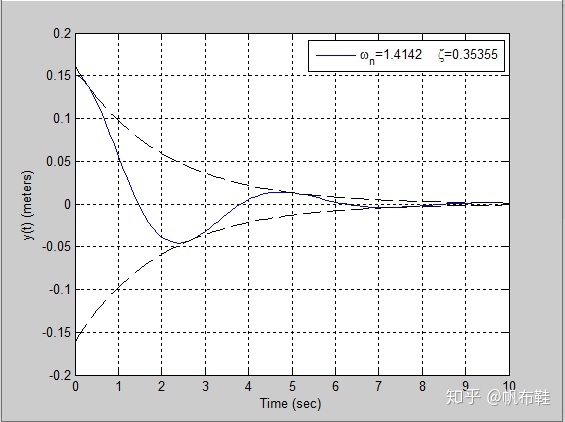
2. 多项式的求解与重组
如求解
使用roots求解根,以及使用poly来重构多项式。
p = [1 3 0 4 ];
r = roots(p)
p = poly(r)3. 多项式的乘积运算与求解多项式的值
使用conv来展开多项式
当变量给定时,使用polyval来求解多项式的值
% Using conv and polyval to multiply and evaluate
% the polynomials (3 s^2 + 2 s + 1 ) ( s + 4).
%
p=[3 2 1]; q=[1 4];
n=conv(p,q)
%
value=polyval(n,-5)4. 求解传递函数/状态空间模型、零极点
使用tf求解传递函数;使用ss求解状态空间模型;
使用pole求解传递函数的极点;使用zero求解传递函数的零点。
% Using tf to create transfer functions.
%
num1=[10]; den1=[1 2 5];
sys1=tf(num1,den1)
%
num2=[1]; den2=[1 1];
sys2=tf(num2,den2)
%
sys=sys1+sys2
p = pole(sys)
z = zero(sys)5. 绘制零-极点分布图
使用pzmap来绘制系统的零极点图
% Transfer function example for G(s) and H(s).
%
numg=[6 0 1]; deng=[1 3 3 1]; sysg=tf(numg,deng);
z=zero(sysg)
%
p=pole(sysg)
%
n1=[1 1]; n2=[1 2]; d1=[1 2*i]; d2=[1 -2*i]; d3=[1 3];
numh=conv(n1,n2); denh=conv(d1,conv(d2,d3));
sysh=tf(numh,denh)
%
sys=sysg/sysh
%
% Generate pole-zero map in Figure 2.47
%
pzmap(sys)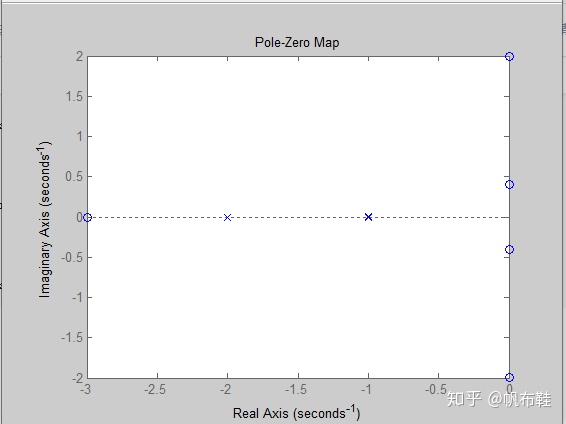
注:实际物理系统中极点个数必然大于或等于零点的个数,上图说明了存在多重极点(或多重零点)
6. 传递函数的串联、并联和反馈
使用series实现传递函数串联;
使用parallel实现传递函数的并联;
使用feedback实现反馈;
[sys]=feedback(sys1,[1],sign):单位反馈,sign默认为-1,表示负反馈,+1表示正反馈;
% Application of the series function.
%
numg=[1];deng=[500 0 0]; sysg=tf(numg,deng);
numh=[1 1];denh=[1 2]; sysh=tf(numh,denh);
sys =series(sysg,sysh);
sys
% Application of the feedback function with unity feedback.
%
numg=[1]; deng=[500 0 0]; sys1=tf(numg,deng);
numc=[1 1]; denc=[1 2]; sys2=tf(numc,denc);
sys3=series(sys1,sys2);
sys=feedback(sys3,[1])
% Application of the feedback function with nonunity feedback.
%
numg=[1]; deng=[500 0 0]; sys1=tf(numg,deng);
numh=[1 1]; denh=[1 2]; sys2=tf(numh,denh);
sys=feedback(sys1,sys2);
sys
7. 重复使用上述的命令则可以实现多回路化简
% Multi-loop block reduction.
%
ng1=[1]; dg1=[1 10]; sysg1=tf(ng1,dg1);
ng2=[1]; dg2=[1 1]; sysg2=tf(ng2,dg2);
ng3=[1 0 1]; dg3=[1 4 4]; sysg3=tf(ng3,dg3);
ng4=[1 1]; dg4=[1 6]; sysg4=tf(ng4,dg4);
nh1=[1 1]; dh1=[1 2]; sysh1=tf(nh1,dh1);
nh2=[2]; dh2=[1]; sysh2=tf(nh2,dh2);
nh3=[1]; dh3=[1]; sysh3=tf(nh3,dh3);
sys1=sysh2/sysg4;
sys2=series(sysg3,sysg4);
sys3=feedback(sys2,sysh1,+1);
sys4=series(sysg2,sys3);
sys5=feedback(sys4,sys1);
sys6=series(sysg1,sys5);
sys=feedback(sys6,[1])8. 多重回路化简之后,必须消除公因式之后,得到真正的传递函数
使用 minreal 完成零-极点对消
% Application of the minreal function.
%
num=[1 4 6 6 5 2];
den=[12 205 1066 2517 3128 2196 712];
sys1=tf(num,den);
sys=minreal(sys1)9. 电力牵引电机控制系统的传递函数与单位阶跃响应
传递函数使用上述的tf、series、feedback可以得到;
单位阶跃响应使用 step可以得到。
% Application of the minreal function.
%
num=[1 4 6 6 5 2];
den=[12 205 1066 2517 3128 2196 712];
sys1=tf(num,den);
sys=minreal(sys1)
% Step response of the traction motor wheel velocity.
%
num=[5400]; den=[2 2.5 5402];
sys=tf(num,den);
t=[0:0.005:3];
[y,t]=step(sys,t);
plot(t,y),grid
xlabel('Time (sec)')
ylabel('Wheel velocity')














 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









