






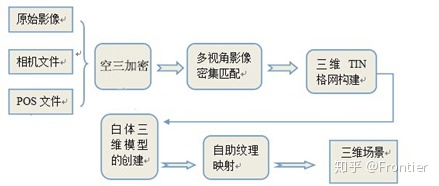
无人机倾斜摄影测量影像处理的关键技术通常包括:数据的预处理,多视影像区域网联合平差,多视影像密集匹配,数字表面模型生产,三维模型的生成及真正射影像的生成与纠正。倾斜摄影定义
倾斜摄影技术是国际测绘领域近些年发展起来的一项高新技术,它颠覆了以往正射影像只能从垂直角度拍摄的局限,通过在同一飞行平台上搭载多台传感器,同时从一个垂直、四个倾斜等五个不同的角度采集影像,将用户引入了符合人眼视觉的真实直观世界。基本流程图
数据预处理
数据的预处理主要包括处理航摄相片和POS数据。航片的预处理主要包括格式转换、对比度调整、曝光调整、色彩曲线、白平衡编辑、降噪等(此操作须谨慎进行,严格按照建模软件数据导入要求执行)。通过对航片进行预处理,可以生成研究区域的航空遥感图像。图像所显示地物的清晰、层系分明、反差适中、色彩鲜明以及色调一致。
多视影像区域网联合平差
采用区域网联合平差来处理倾斜摄影数据,这可以全面解决像片之间的几何变形以及遮挡问题。通过POS数据中得到的倾斜图像外方位元素,采用由粗到精的金字塔匹配策略在每一级像片上进行同名点的自动匹配以及区域网光束法平差,能够得到较好的同名点匹配结果。同一时刻,构建了连接点与连接线、POS数据与GPS/IMU数据的倾斜图像自检校区域网平差的误差方程,对其采用联合平差计算,来确保平差结果精度能够满足要求。

多视影像密集匹配
该技术的其中一个主要问题便是影像密集匹配,并且倾斜图像的笼罩区域大、分辨率高。所以,在密集匹配过程中可能会产生大量冗余信息的前提下,如何迅速精确地得到倾斜图像的同名点坐标,从而获取地面物体的三维信息是倾斜影像密集匹配的重点。仅使用一种匹配策略或者一种匹配基元通常不便从倾斜图像中提取三维建模时需要的同名点,所以由于SfM发展起来的多基元、多角度图像匹配方法慢慢的变为解决倾斜影像密集匹配的较好方案。
数字表面模型生产
通过密集匹配得到高密度真彩色点云,再由其构成TIN三角网,进而形成了高分辨率以及高精度的数字表面模型,在获取该DSM数据后,对其采取滤波处理,同时将有差异的匹配单元融合,构成最终数字表面模型,可以充分表达地形、地物起伏特征。
三维模型及真正射影像生成与纠正
对无人机获得的图像进行处理以后,采取可建模软件生成三维模型。真正射影像纠正是基于数字表面模型,依据物方不间断的地形地貌以及离散的地物的几何特点,利用提取表面特征、面片拟合以及重建屋顶等方式来获取物方语义信息,再由图像分割、边缘信息的获取以及纹理聚类等方式来得到像方语义信息,然后利用前期的匹配结果将创建各个方面的的同名点对应联系,从而进行全局优化的采样策略和考虑到的几何辐射特征的联合纠正,再对整个图像进行匀光匀色,实现了倾斜图像的真正射纠正。
关注公众号“三维前沿”,获取更多无人机、倾斜摄影前沿技术资讯。















 1592
1592











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









