






 本文详细介绍了新一代伺服驱动器Kinetix5100的特性,包括其功率范围、控制模式和网络选项。此外,还涵盖了伺服选型、硬件接线、专用软件KNX5100C的使用,以及自整定过程,为用户提供了不依赖PLC的伺服控制基础操作。
本文详细介绍了新一代伺服驱动器Kinetix5100的特性,包括其功率范围、控制模式和网络选项。此外,还涵盖了伺服选型、硬件接线、专用软件KNX5100C的使用,以及自整定过程,为用户提供了不依赖PLC的伺服控制基础操作。
一、产品系统概览:
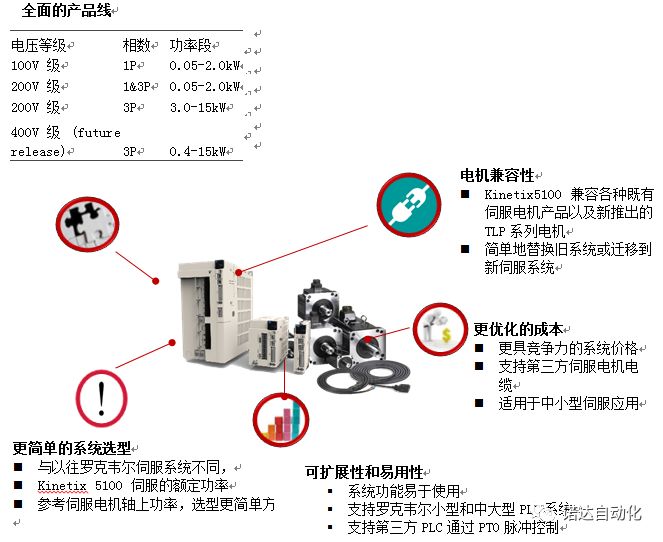
作为新一代的伺服驱动器, Kinetix5100 伺服驱动器在一个产品线中提供可扩展的经济实用的伺服控制选择。与同等替代品相比,Kinetix®5100 驱动器具有更大的功率范围选择,最高达到 15 kW,支持由独立式、Micro 800 或 Logix 控制的应用项目,满足各种性能要求。Kinetix®5100 驱动器注重 Integrated Architecture 功能,可以使用专为 Logix 用户构建的 AOI 集成到 Logix 应用项目中。此驱动器配有标准输入和输出、不同的控制模式以及安全断开扭矩和双端口 EtherNet/IP,以适合各种网络拓扑结构。Kinetix5100 驱动器专为多功能性而设计,允许您选择所需的功率以及应用方式以满足应用项目的独特需求。
二、伺服选型:
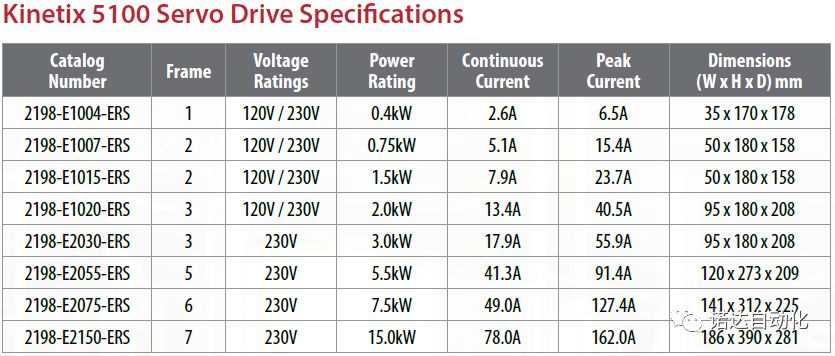
1、伺服驱动器:目前电压等级在220V,功率在0.4KW-15KW.相信在今年将会推出380V级,作为亮相不久的轻量型伺服驱动器,肯定还有很长一段路要走。
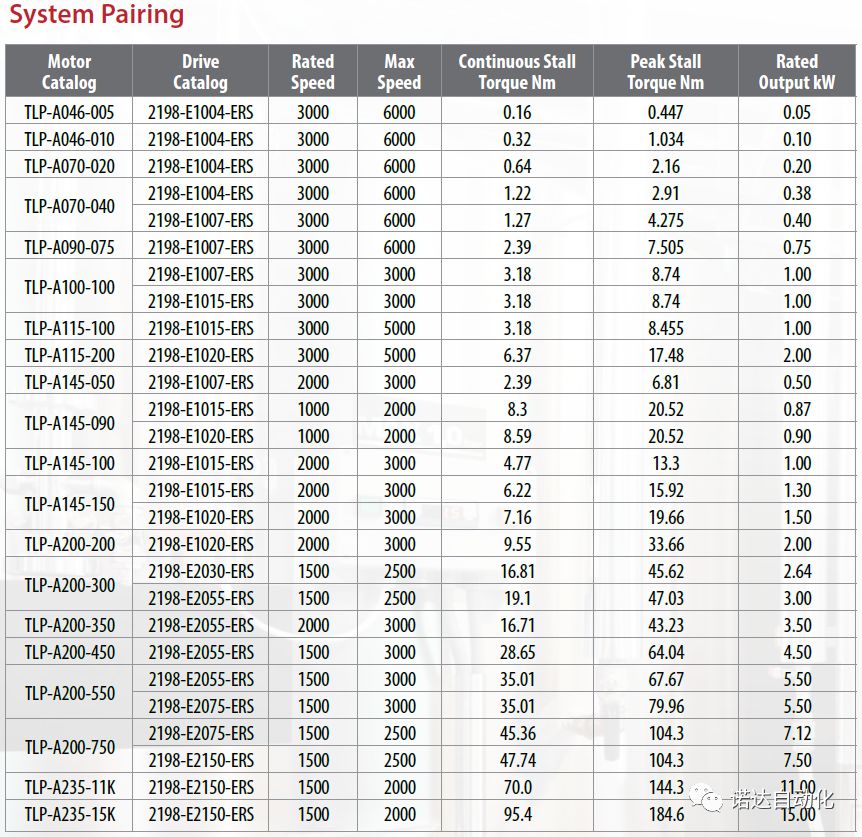
2、TLP电机:其功率转矩皆可见于下方图表。
3、Kinetix5100 附件明细

驱动器订货号包含的端子

电机电缆接地

2198-USBC

2198-USBF

原装电缆

2198-TBIO
(选件)
?关于电缆线,AB接受接头(图中红框内)单独售卖,可以使用第三方线缆。
三、硬件组成及接线:
1、简单介绍了伺服驱动器和电机,那运用上我们配合PLC来控制以达到工艺需要。连接实例
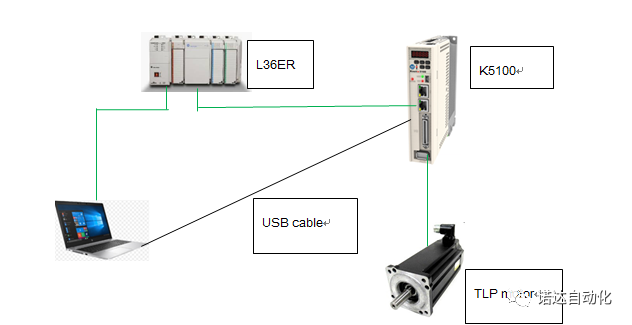
在控制器方面,除了支持以太网通讯控制,也支持脉冲控制,用户支持PTO就行,极大的增强了用户可选择性。目前配套的解决方案是COMPACT+5100的一个组合配合使用,走以太网通讯。
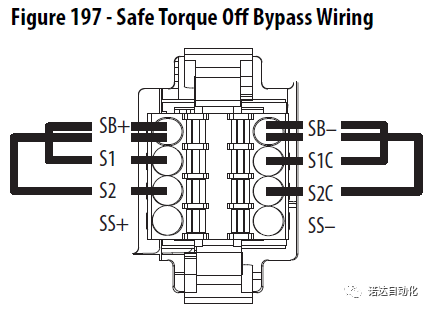
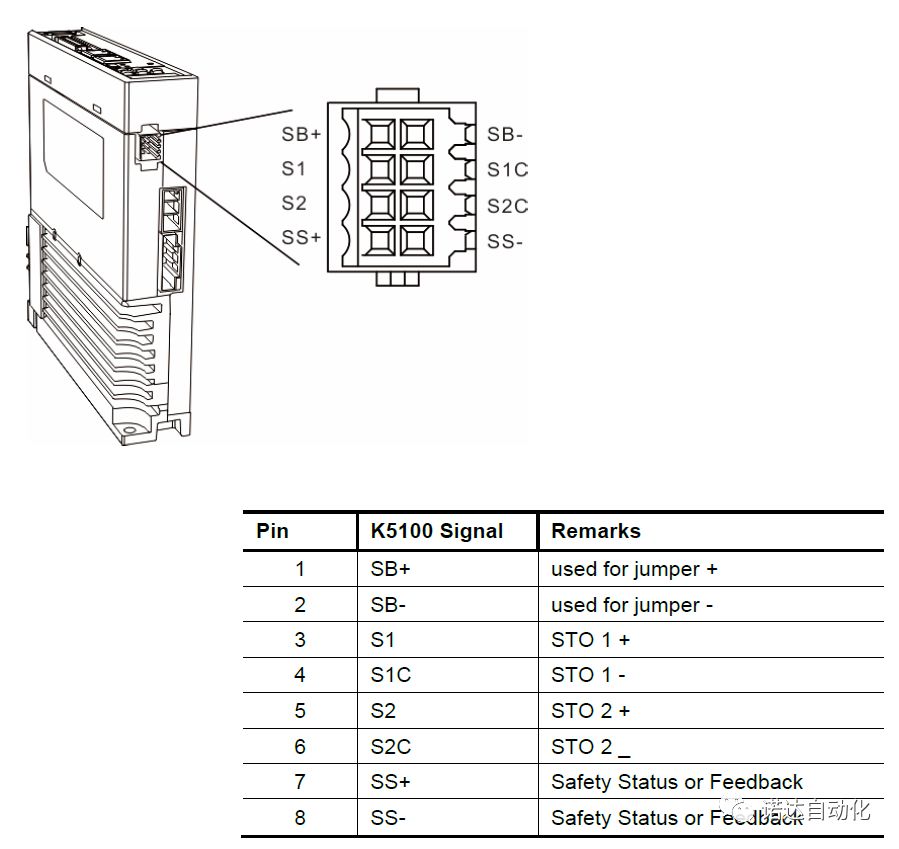
2、Safety torque off接线
Safety torque off接线
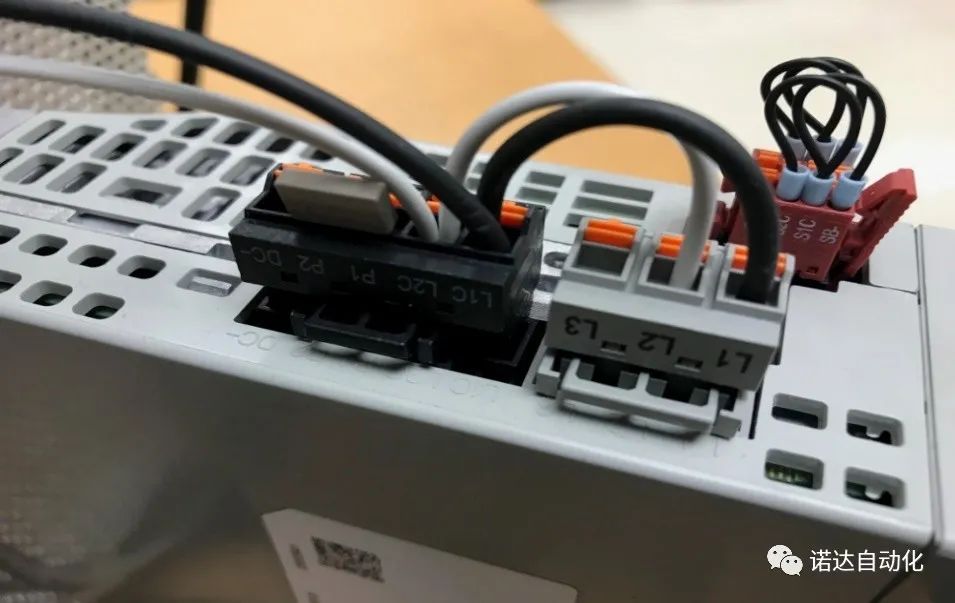
3、动力电及控制电接线
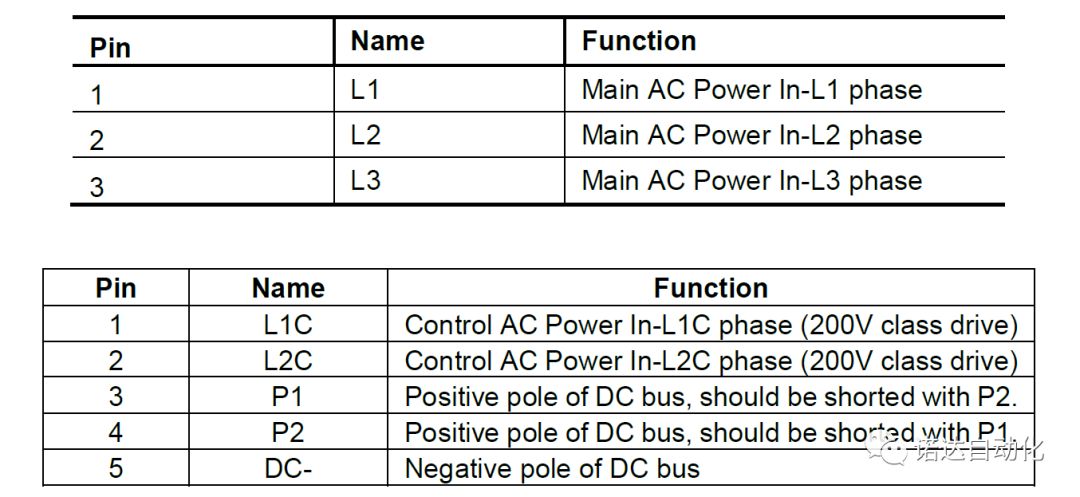
连接AC220V至动力接线L1,L2端,控制接线L1C,L2C端(注意:200V级驱动器的控制电源是AC220V,400V级驱动器的控制电源是DC24V)。连接电机动力电缆,反馈电缆,网线。IO端子可不接。
以上是关于5100驱动器硬件上的一些简单介绍,如果想对其有更深的了解,可以联系我们。在软件方面,不同于前代的伺服,除了我们的studio5000除外,我们还特别推出了KNX5100C专门用来对电机的一个调试,在不带PLC的情况下,通过USB简单的连接,切换IO来使电机达到一个转动的效果。前期也可以做一个自整定的过程以使电机达到一个最优的效果。
四、软件:
1、安装KNX5100C软件
https://pan.baidu.com/s/17Vn2WvVpmNzZM_pbDW7CoA(软件下载链接)
安装配置软件KNX5100C_1.0.0.27_Install.exe,有个Texas会安装失败,但不影响使用。
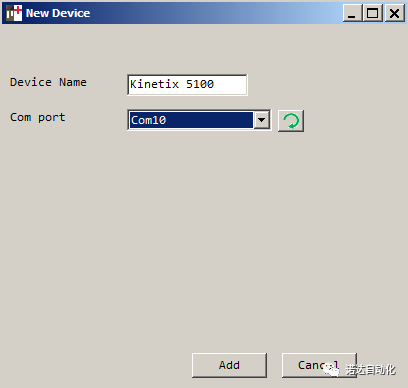
用USB线连接驱动器至PC,双击打开配置软件,弹出USB驱动安装向导,取消后进入,选择Com口,连接。


2、语言
Setting键可以选择语言,默认语言英文,可选择为简体中文和繁体中文。
3、通讯连接
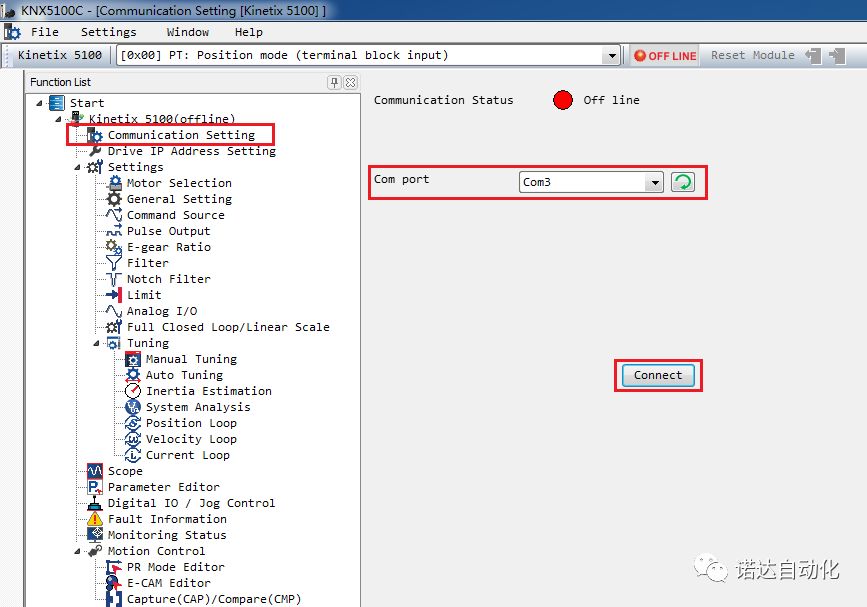
点击OFF LINE连接
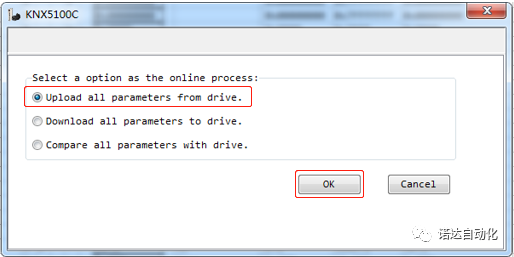
ON LINE已连接
4、设置IP地址
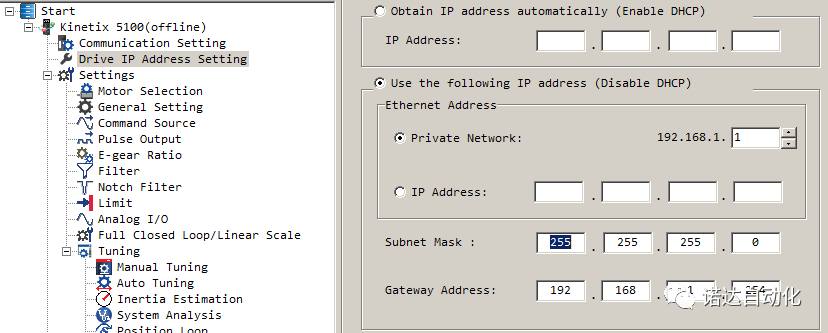
驱动器初始默认的IP地址为192.168.1.1
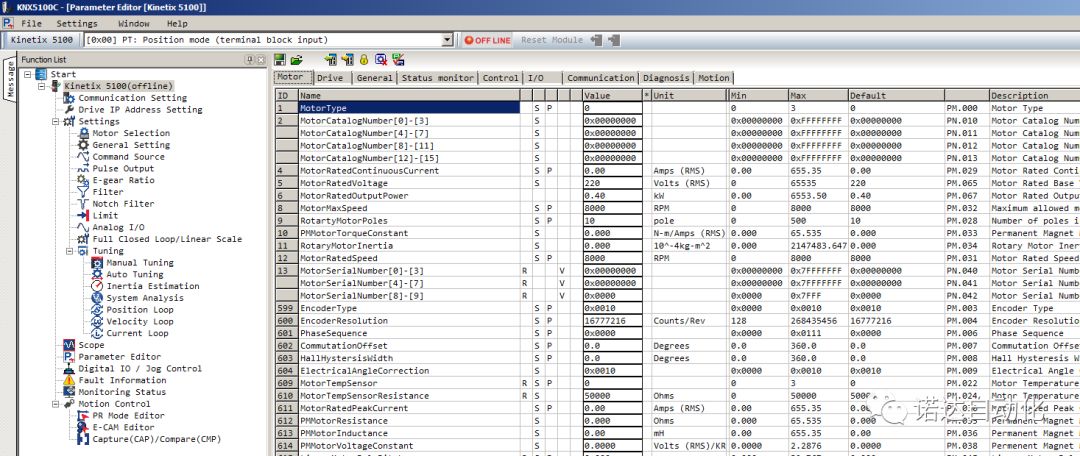
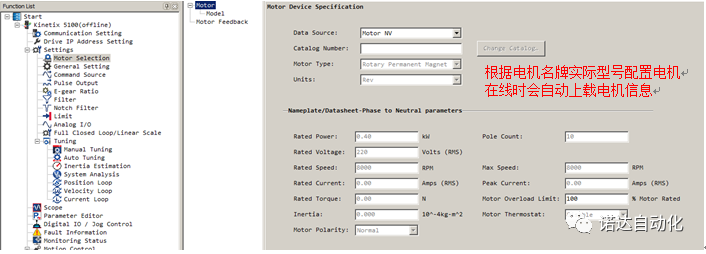
5、根据电机名牌实际型号配置电机
6、IO配置及强制使能
由于IO端子没有安装和连接,其中有一些信号比如急停和限位信号会报警导致驱动器无法使能,需要手动配置关闭。清除报警后就可以在此页面底部强制使能驱动器,并可以以一个较低速度Jog电机和换向,如果此时电机可以按照设定速度转动,可判断基本接线没有问题,可进行后续参数优化和功能配置。
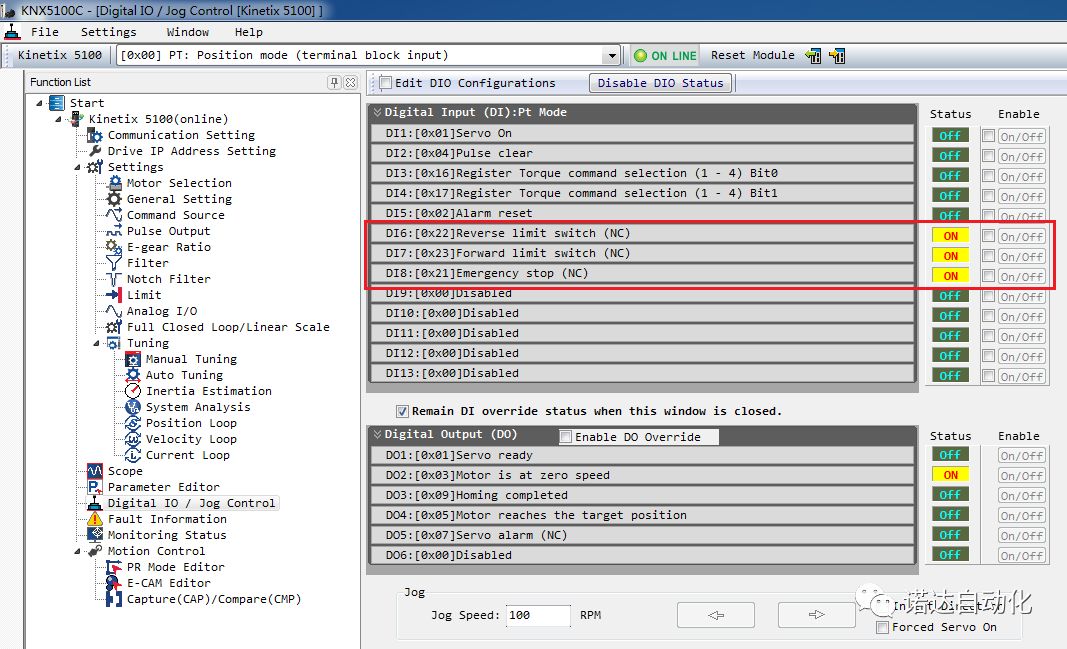
默认DI6、DI7、DI8,默认是NC(常闭),状态为ON,正负限位及急停报警,需要手动配置为OFF,DI5清除故障即可(注:重新上电后,状态还是会为ON);
7、自整定过程
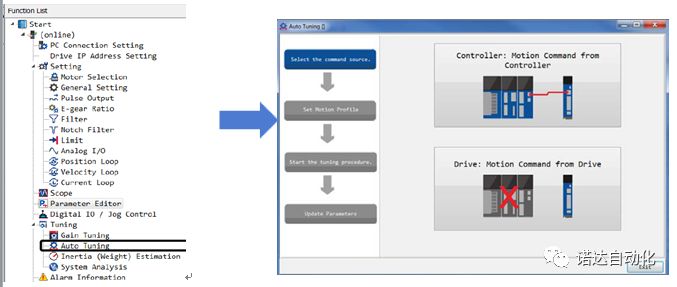
树形目录栏点击Auto Tuning,选择下面的Drive模式,即使用KNX5100C软件操作自整定过程。
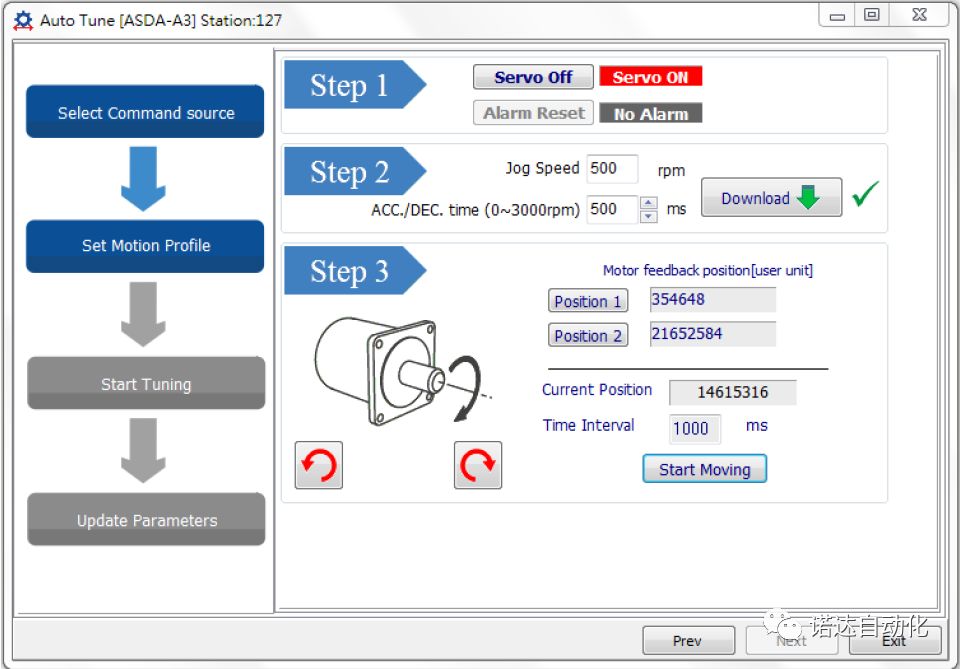
(1) 使能驱动器
(2) 设置自整定速度和加减速时间,不宜设置过小,点击download
(3) 反转电机到位置1
(4) 点击position 1确定
(5) 正转电机到位置2
(6) 点击position 2确定。获取pos1和pos2目的是在有负载或机械限位的情况下设定自整定的运动位置范围,两个位置差不宜过小。
(7) 点击start moving电机即开始旋转自整定,然后点击next进入下一界面。
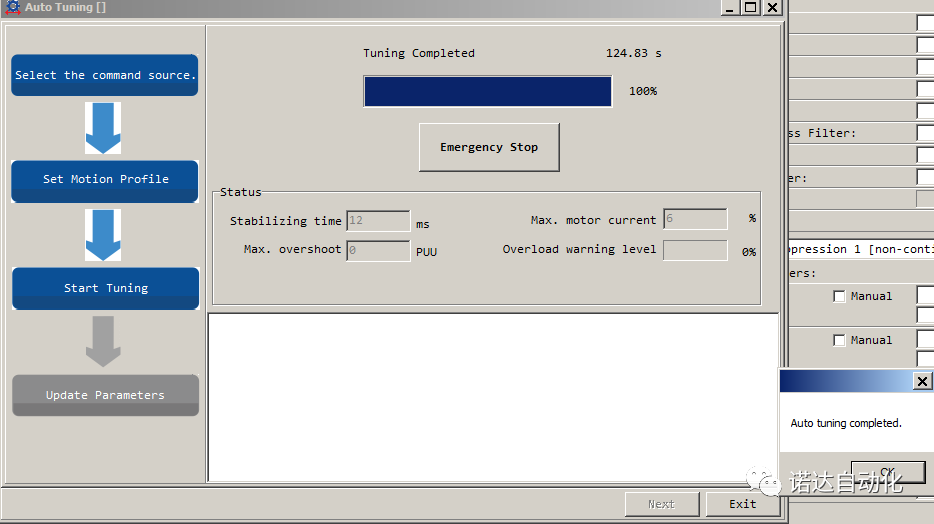
(8) 在此页面可显示自整定进度,电机此时正在旋转,如有意外可点击emergency stop
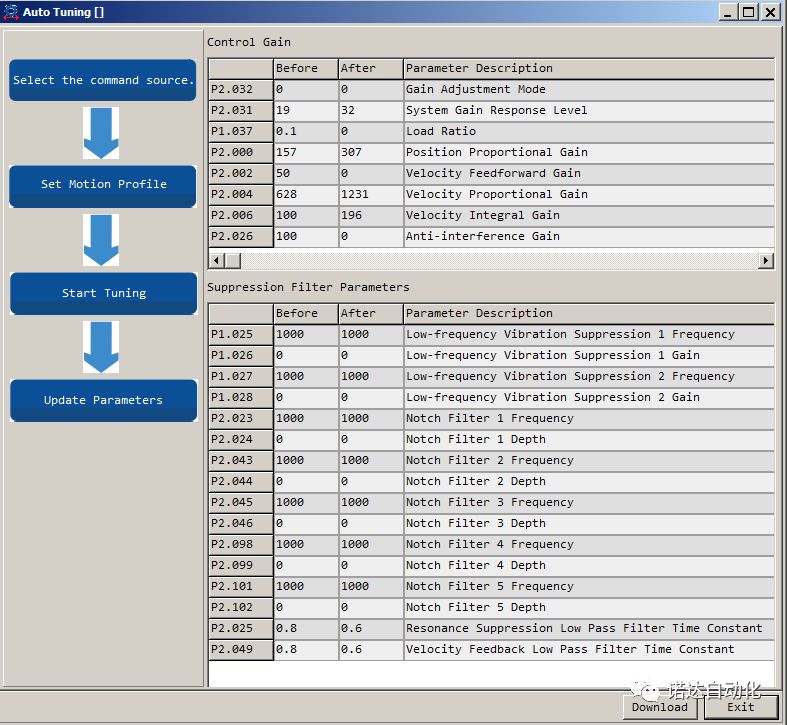
(9) 自整定需要2-3分钟左右,整定结束后可查看自整定结果,并download。
8、scaling设置
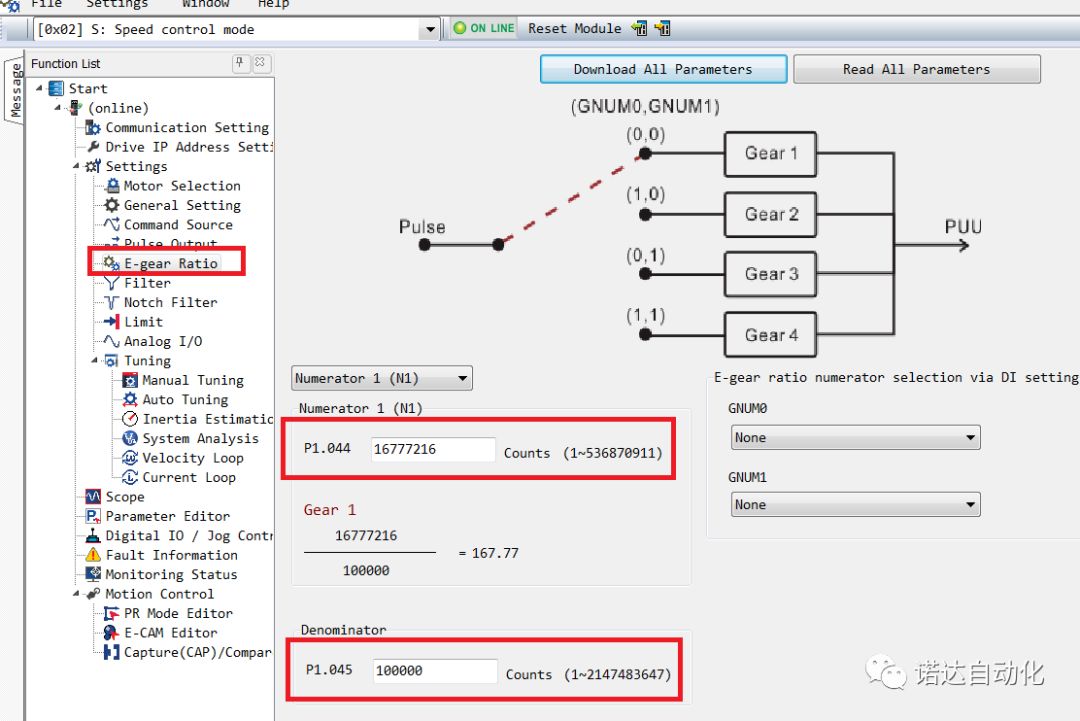
P1.044为电机默认精度,P1.045为电机位置信号在PLC变量中actual position的单圈精度,默认100000。
9、EIP模式
以上是关于通过5100C软件在不带PLC的情况下伺服驱动器对电机的一个简单动作,当然也可以用PLC控制,改变驱动器到IO模式由PLC控制
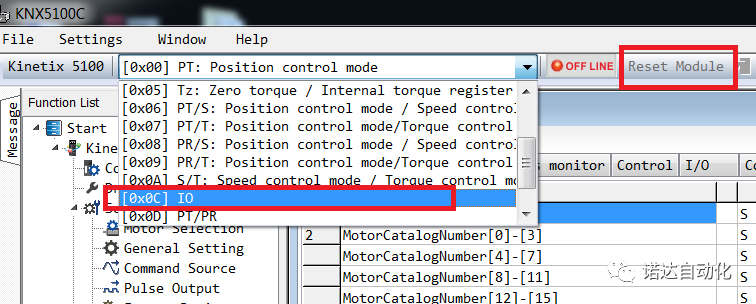
Reset驱动器或重新上电,驱动器会建立与PLC的Ethernet连接并断开与KNX5100C的USB连接。
好了,关于5100的一个简单介绍就先到这里,主要是介绍了在不带控制器时的一个应用。

诺达自动化公众号
写稿人:张政
有那么多技能,你不进来学几招再走么?


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









