






摘要:定位是水声传感器网络中最重要的问题之一,特别是当传感器节点被随机部署时。由于很难在预定的位置部署信标节点,因此在海面或路径规划上使用移动信标的定位方案本身是方便、准确和节能的。本文提出了一种新的基于移动信标的无距离定位方法。移动信标周期性地广播包含其位置的信标消息。传感器节点是通过被动地接收信标消息而单独定位的,而不需要节点间的通信。对于位置估计,获取一组潜在位置作为节点位置的候选位置,然后通过所有潜在位置的加权平均值确定节点的位置,并根据残差计算权重。
1.引言:
定位是水下传感器网络面临的挑战之一,近年来许多研究都集中在定位方面。在这些研究中,定向信标定位是一种具有移动信标的无距离定位方案。在定向信标定位中,传感器节点可以通过被动监听带有声定向收发器的AUV发送的信标来定位自己。由于传感器节点在没有节点间通信的情况下只接收来自AUV的信标,所以定向信标定位是节能的,因为它降低了由于发射而消耗的能量;发射所消耗的功率通常是接收所消耗的功率的100倍。此外,由于传感器节点可以独立于其他传感器节点使用自己从AUV接收到的信标进行定位,所以即使在稀疏网络中,定向信标定位也具有细粒度的精度。传感器节点的深度由廉价的压力传感器直接决定。在将来自AUV的第一和最后接收信标(称为信标点)投影到传感器节点所在的水平平面后,可以根据两个投影信标点之间的距离确定传感器节点的位置。此时,传感器节点的位置保持模糊,因为两个投影的信标点提供两个可能的节点位置。如果传感器节点获得两个更多的信标点,则可以解决模糊度。前两个信标点用于位置计算,而另两个信标点用于解决模糊度。然而,如果用于位置计算的两个信标点具有大的误差,则估计的传感器位置中的误差也增加。即使可以简单地从前两个信标点计算传感器节点的位置,但是在所有信标点中仅使用两个点可以使定位非常容易出错。为了提高具有挑战性的水下环境中的定位精度,我们提出了一种新的定位方案移动信标在水声传感器网络中的定位,其利用双边化方法获得作为节点位置的候选的潜在位置集合,然后通过基于残差计算的权重的所有潜在位置的加权平均值来定位传感器节点。投影到传感器节点所在的水平平面上,可以基于两个投影的信标点之间的距离来确定传感器节点的位置。
2.相关工作
本文简要介绍了定向信标定位的系统环境、信标点选择和位置估计。
2.1 系统环境
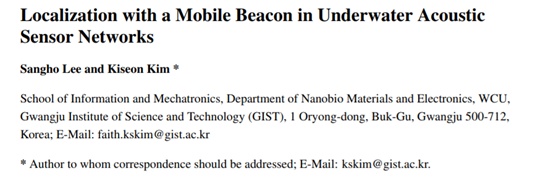
在定向信标定位中,具有定向收发器的AUV在水中的固定深度处移动,并以规则的间隔(称为信标距离(d)广播其位置(称为信标)和其收发器的波束(a)的角度,如图2(a)所示。当AUV发送信标时,落在锥形波束中的传感器节点接收信标;例如,在图2(a)中,红色的传感器节点可以接收信标B2,并且蓝色的传感器节点可以接收信标B1、B2和B3。锥形束根据传感器节点的深度形成具有不同半径的圆,如图2(a)所示。当AUV和传感器节点的z坐标为Za和Zs并且收发器的波束的角度为a时,由用于传感器节点的波束形成的圆的半径如下所示:

图1 定向信标定位的系统环境和信标点选择和投影。(a)具有定向收发器的AUV的系统环境;(b)从所接收的信标中选择和投影信标点。
图1 定向信标定位的系统环境和信标点选择和投影。(a)具有定向收发器的AUV的系统环境;(b)从所接收的信标中选择和投影信标点。
2.2 信标点选择
从位于(x,y,zs)的传感器节点的角度来看,当信标位于半径rb的圆心圆内时,传感器节点可以接收信标;例如,在图1(b)中,传感器节点接收信标B1到B6。在接收信标系列中,第一信标被定义为第一信标点,最后信标被定义为最后一次听到信标点。传感器节点的位置估计仅使用信标点,而不是所有接收到的信标。因为传感器的深度是从压力传感器中知道的,所以信标点可以投影到传感器节点所在的水平平面上,如图1(b)所示。在投影后,将三维定位问题转化为二维定位问题。
2.3 位置估计
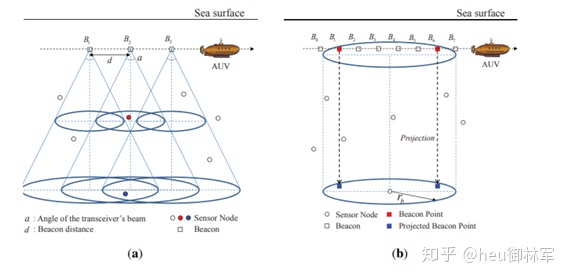
我们描述了基于投影信标点的位置估计。如图2(a)所示,投射的第一次听到的信标点由F表示,最后一次听到的信标点由L表示。在第一次听到信标点之前收到的信标的投影点被定义为投射的先听信标点F‘(例如,在图1(b)中,B0的投影点),以及最后听到信标点之后的信标投影点被定义为投射的后听信标点L’(例如,在图1(b)中,B7的投影点)。
图2.基于几何约束的投影信标点位置估计。(a)根据两个预计信标点进行位置估计;(b)使用另外两个预计信标点来确定地点。
然后以在四个点F’、F、L和L’为中心的半径rb绘制四个圆。因为传感器节点应该位于以F'和L’为中心的圆的外部,并且在以F和L为中心的圆的内部,相交区域ABCD和A’B’C’D’表示传感器节点的可能位置。两个点中的一个S和S’将被估计为传感器节点的位置。这里,S是B和D的中点,而S’是“B’和“D’的中点。当仅仅使用一个投影的第一听到的信标点和一个投影的最后一个听到的信标点时,找到两个可能的节点位置。如图2(b)所示,可以在获得额外的两个信标点之后进行两个点S和S’之间的选择。在定向信标定位中,第一两个信标点用于基于几何约束来计算传感器节点的位置的两个可能点,并且接下来的两个信标点用于两个可能点之间的选择。
3. 移动信节点定位方案
在这一部分中,我们介绍了移动信标节点定位的系统环境、信标点的选择和位置估计方法。由于移动信标节点定位可以应用于使用定向收发器或全向收发器的系统,因此我们解释了两个系统的移动信标节点定位。此外,由于移动信标节点定位改进了定向信标定位,所以我们通过与定向信标定位的比较和对比来解释移动信标节点定位。
3.1 系统环境
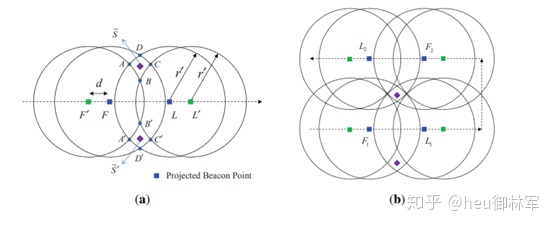
移动信标节点定位考虑使用全向收发器的系统,以及使用定向收发器的系统。由于使用定向收发器的系统环境在第二节中已经解释过,所以我们在这里解释了使用全向收发器的系统环境。移动信标在海面或水下移动。当移动信标具有全向收发器时,移动信标的三维移动是可能的,而具有定向收发器的移动信标仅限于固定深度的2D移动。假设移动信标传感器知道自己的位置,并在一定距离间隔广播包含其位置信息的信标,称为信标距离d。当移动信标发射信标时,位于移动信标通信范围内的传感器节点接收信标;例如,在图3(a)中,红色的传感器节点可以接收信标B2,而蓝色的传感器节点可以接收信标B1和B2。这里,假定通信范围r在3D中为常数。此外,由于移动信标在直线上的移动比弯曲移动更容易控制,因此假定移动信标遵循随机移动点(RWP)模型;移动信标在一系列直线上移动到随机目的地。
图3系统环境、信标点选择和移动信标节点定位的投影。(a)具有全向收发器的移动信标的系统环境;(b)从所接收的信标中选择和投影信标点。
3.2 信标点选择
从传感器节点的角度来看,当信标在传感器节点的通信范围内时,传感器节点可以接收信标;例如,在图3(b)中,传感器节点接收信标B1至B6。从接收到的信标中选择信标点,就像在定向信标定位中一样。当传感器节点从移动信标接收到第一信标时,选择第一信标作为信标点;即图3(b)中的B1。如果传感器节点在接收到最后一个信标后的预定义时间内没有接收到进一步的信标,则选择最后一个信标作为信标点;即图3(b)中的B6。每次移动信标通过传感器节点的通信球时,重复上述过程。
如图3(b)所示,信标点不完全位于传感器节点的通信球体上,因为传感器节点在每个信标距离d处接收信标。当传感器节点的通信范围为r时,信标点位于距离传感器节点的r−d和r之间。基于信标点与传感器节点之间的距离范围,将距离的中间值r−d/2估计为信标点与传感器节点之间的距离,以减小估计距离中的误差。
传感器节点被假定具有压力传感器,因此它们被假定知道它们的深度。有了这些深度信息,信标点就可以投影到传感器节点所在的水平平面上,如图3(b)所示。当传感器节点和第i信标点的z坐标为zs和zi时,传感器节点与第一投影信标点之间的距离r’i为:

对于使用定向收发信机的系统,所有投射的信标点都位于从传感器节点到rb−d和rb的距离之间;在这里,rb是由波束对传感器节点形成的圆的半径。随后,传感器节点与投影信标点之间的所有估计距离均为相同的rB−d/2。
3.3 位置估计
在本小节中,我们解释了如何基于传感器节点和投影的信标点之间的距离来估计传感器节点的位置。首先,获得作为传感器节点位置的候选位置的潜在位置。其次,使用潜在位置的加权平均值来估计传感器节点的位置。
3.3.1获得潜在位置
在估计传感器节点和投影信标点之间的距离之后,需要解决以下等式用于定位:
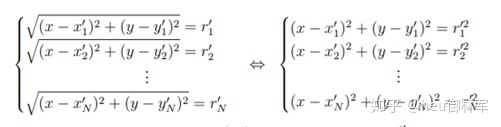
其中(x,y)是传感器节点的位置,(x‘i,y’i)是第i投影信标点的位置,N是投影信标点的数目,r‘i是传感器节点与第i投影信标点之间的估计距离。
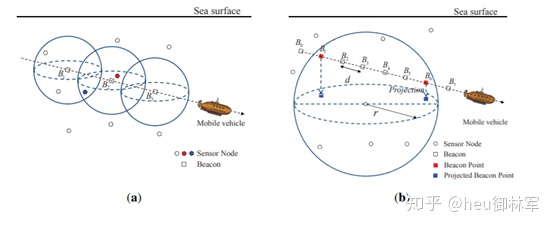
图4使用投影的信标点估计传感器节点位置。
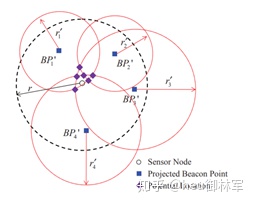
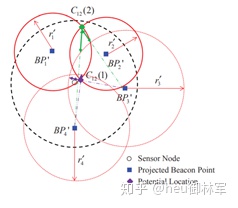
图5 选择两个交点之间的潜在位置。
3.3.2.加权平均法估计传感器节点位置
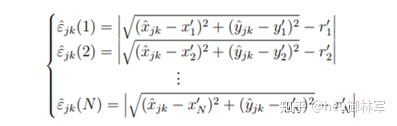
可以使用所有潜在位置来估计传感器节点的位置。传感器节点的位置可以简单地估计为所有潜在位置的平均值。然而,为了提高估计精度,可以使用潜在位置的加权平均值。在这里,权重是根据我们在这里定义的残差来确定的。设x’作为x在f(x)=b处的解,残差是b−f(x’),它指示f(x’)离b的正确值有多远,误差是x’−x,因为我们不知道x,所以不能计算误差,但我们可以计算残差。从方程(1)中,与潜在位置pjk(x’jk,y’jk)相关联的N个残差可以计算如下:
由于潜在位置的精度预期与残差之和成反比,残差之和的倒数表示加权因子。潜在位置Pjk(x’jk,y’jk)的重量定义如下:
最后,将传感器节点的位置估计为所有潜在位置的加权平均值。
4. 仿真结果
图5定位精度是信标距离的函数。(a)平均位置误差;(b)局部传感器节点的比率。
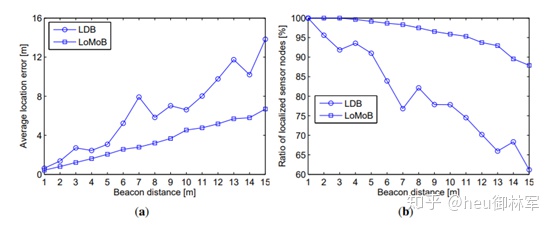
图6 定位精度是由收发器的光束形成的圆半径内的标准偏差的函数。(a)平均位置误差;(b)局部传感器节点的比率。
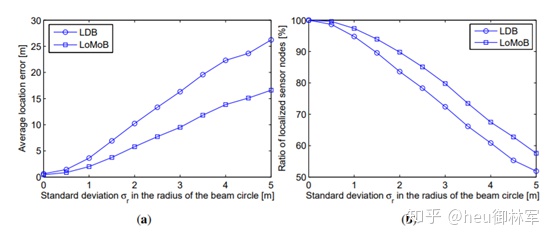
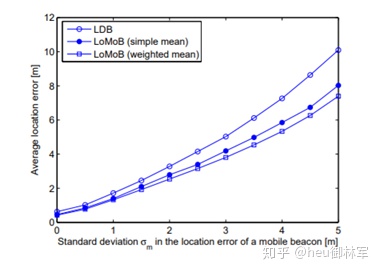
图7 定位准确度是移动信标的位置误差中的标准偏差的函数。(a)平均位置误差;(b)局部传感器节点的比率

图8.简单平均数和加权平均数的比较。
5 结论
本文提出了一种基于移动信标的UASN无距离定位方案,该方案根据残差为潜在位置提供加权因子,并通过潜在位置的加权均值对传感器节点的位置进行估计。由于移动信标节点定位基于潜在位置的权重对传感器节点进行定位,提高了定位精度,对投影信标点与传感器节点之间距离的估计具有更大的容错性。仿真结果表明,移动信标节点定位能显著提高定向信标定位的定位精度,特别是在水下环境中,由于收发信机波束形成的圆半径不均匀和移动信标的定位误差,移动信标节点定位的定位精度得到了很大的提高。仿真结果表明,与定向信标定位相比,移动信标节点定位对距离估计误差具有更强的鲁棒性。
参考文献:Lee, S.; Kim, K. Localization with a Mobile Beacon in Underwater Acoustic Sensor Networks. Sensors 2012, 12, 5486-5501.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









