





拓扑说明
新能源发电系统的核心模块是并网逆变器,LCL型并网逆变器因具有优越的高频谐波抑制能力而受到广泛重视(光伏、储能等并网中应用较多)。并网逆变器采用LCL滤波器,具有更优的高频谐波衰减性,滤波效果更佳。本次主要对单相和三相LCL逆变拓扑模型进行讲解。
LCL并网逆变器的拓扑结构如下图所示,其中idc为直流侧电流,Udc两端为直流侧母线电压,L1,L2,C,组成三阶LCL滤波器,r1为电感L1等效阻抗,r2为电感L2等效阻抗,Us/Ug为电网电压。
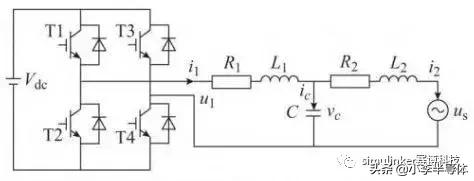
单相LCL并网拓扑
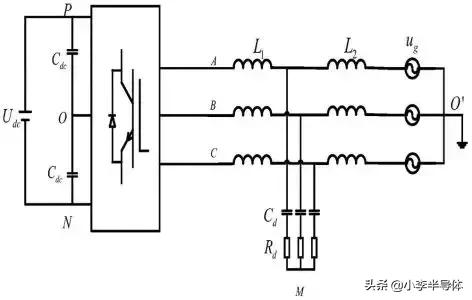
三相LCL并网拓扑
控制说明
LCL型并网逆变器的电流控制策略可分逆变器侧电感电流控制的间接电流控制策略、直接电流控制策略和两者混合控制的策略。而针对并网逆变器LCL滤波器的高频谐振问题,常采用无源阻尼控制和有源阻尼控制两种方法抑制。
无源阻尼控制有滤波器电感或电容支路串联或并联电阻四种,它实现简单,不需要额外的控制环节,但是会额外增加系统的功率损耗。有源阻尼控制主要包括虚拟电阻法、在前向通道中添加陷波滤波器、分裂电容法、零极点配置法以及电容电流补偿法等。有源阻尼法的优点是在不增加系统损耗、不影响滤波器对高频谐波的抑制能力下,通过控制算法有效抑制谐振尖峰。
本模型中采用无源阻尼通用双闭环控制,外环为电网电流控制(一般为PID或PI控制),内环为滤波电容电流控制(PI或P控制),可在控制中加入电网电压前馈。控制框图如下:
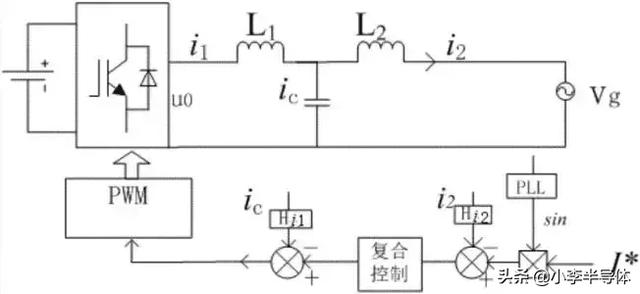
单相LCL并网控制
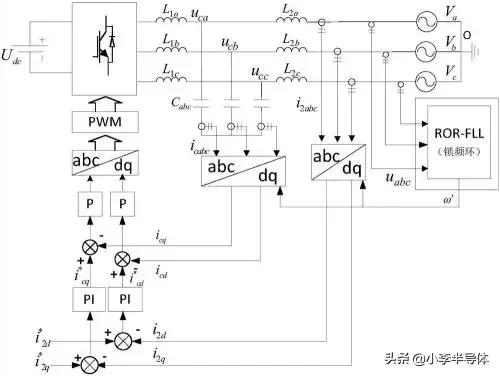
三相LCL并网控制
仿真模型
1、单相LCL并网
单相并网整体模型如图所示,主电路直流侧电压400V,交流电网电压220V,L1=2e-3H,R1=0.1Ω,L2=1e-3H,R2=0.1Ω,C1=2e-6。
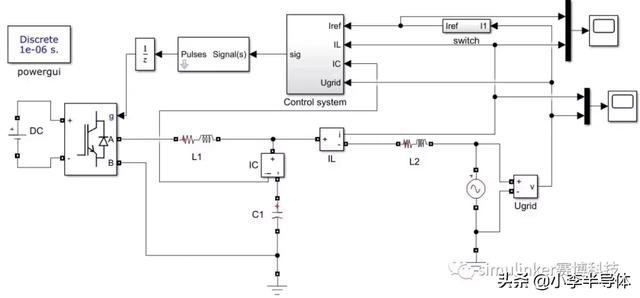
整体仿真模型
控制采用带电网电压前馈的双闭环控制,在控制过程中,0.3s参考波给定值发生变化,验证模型控制跟踪情况。
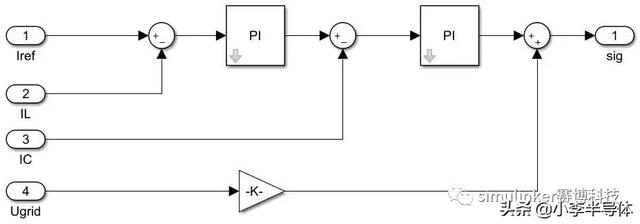
控制部分
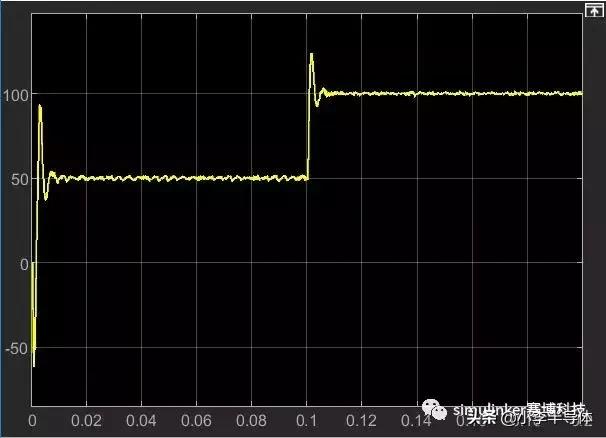
仿真波形
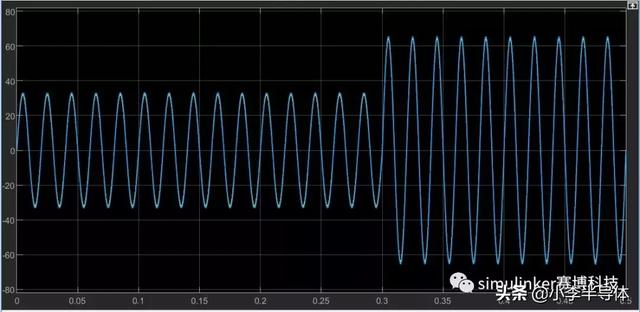

参考电流与实际电流
并网电流、电网电压
2、三相LCL并网
三相LCL并网整体模型如下,其中直流电压800V,电网电压380V,LCL结构L1=900e-6H,L2=350e-6H,C=10e-6。
整体模型
控制仍然采用经典的双闭环控制,外环直接分别给定电流解耦后dq轴参考电流值。
LCL控制
LCL控制
仿真波形
(1)id给定值为50,0.3s后变为100,iq给定值为0
id、iq实际值
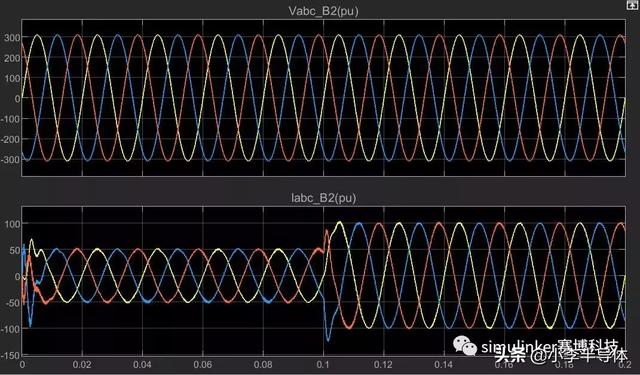
电网电压、并网电流
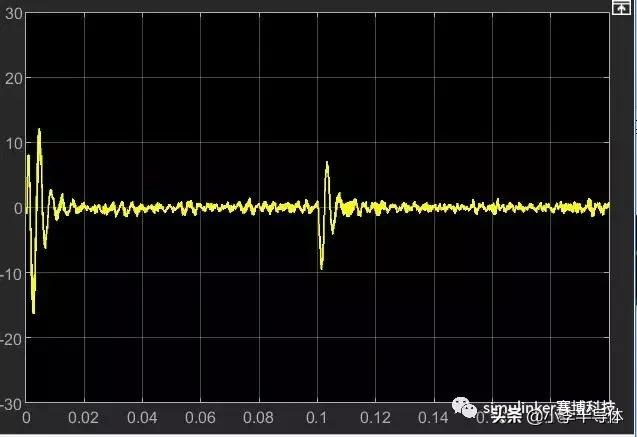
电网电压、并网电流(A相)
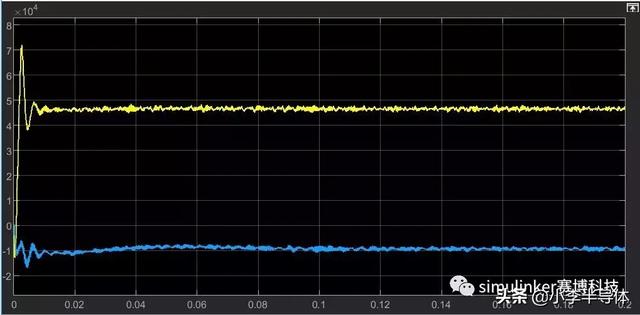
有功、无功
(2)id给定值为100,iq给定值为20
id、iq实际值
有功、无功
通过仿真波形,说明模型整体控制效果良好,能够很好地跟踪给定值的变化,模型运行良好。















 767
767

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









