






PLC的浮点数比较和传送是编程过程中常用到的功能指令,这里给大家分享浮点数的比较和传送指令如何使用。
1、2进制浮点数比较指令
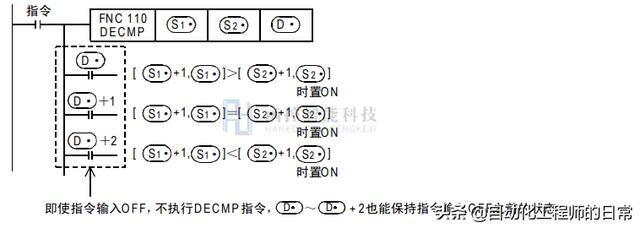
比较2个数据(2进制浮点数),将结果(大于、等于或小于)输出到位软元件(3点)中的指令。
将比较值[S1 +1,S1 ]和比较源[S2 +1, S2]作为浮点数数据进行比较,然后根据比较的结果(小于、 等于、大于)将D 、D +1、D +2中的任意一位置ON。[S1 +1,S1 ]、[S2 +1,S2 ]中指定了常数(K、H)时,会自动将数值从BIN转换成2进制浮点数后再处理。
S1:保存要比较的2进制浮点数数据的软元件编号
S2:保存要比较的2进制浮点数数据的软元件编号
D:输出结果的起始位软元件编号(占用3点)
2、2进制浮点数区间比较
2进制浮点数区间比较将比较值 [S1 +1,S1]、[S2 +1,S2 ]和比较源 [S +1,S ]作为浮点数数据进行比较,然 后根据结果(小于、等于或大于)将D 、D +1、D +2中的任意一位置ON。在 [S1 +1,S1 ]、[S2 +1,S2]、[S +1,S] 中指定了常数 (K、H) 时,会自动将数值转 换成2进制浮点数后再处理。

S1:保存要比较的2进制浮点数数据的软元件编号
S2:保存要比较的2进制浮点数数据的软元件编号
S:保存要比较的2进制浮点数数据的软元件编号
D:输出结果的起始位软元件编号(占用3点)
3、2进制浮点数数据传送
传送2进制浮点数数据的指令。
将传送源[S +1,S]的内容(2进制浮点数数据)传送到[D +1,D ]中。此外,还可以在S中直接指定实数(E)。

S:传送源的2进制浮点数数据,或是保存数据的软元件编号
D:保存2进制浮点数数据的软元件编号
特别注意
浮点数占用的地址是32位,故在设置变量的时候,应注意不要有变量地址重叠。以免出现错误。
(转载请注明来源函控自动化工程师头条号)















 1799
1799











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









