本篇为稀疏矩阵求解算法经典论著<Direct Methods for Sparse Linear System>的<读书笔记 6>
稀疏矩阵的消去树(Elimination tree)部分,在书中的第4章Cholesky分解的第一节。消去树甚至要比稀疏三角方程求解更为重要,他出现在很多算法以及定理中。引入消去树的目的在于减少计算图的可到达性。
4.1 Elimination tree
首先我们先从Cholesky分解入手,对于一个稀疏对称正定矩阵
![]()
可以分解为
![]()
,其中
![]()
为下三角矩阵,并且对角线元素为正值。在矩阵
![]()
中出现的非零entry,如果没有在矩阵A中同样的位置非零,这被称为fill-in,即矩阵
![]()
的非零样式中新填入了非零entry。我们令图
![]()
为矩阵
![]()
的无向图,这个图被称为 矩阵
![]()
的 filled graph。
Fill-in会对稀疏矩阵带来非常多的麻烦,所以一般均要通过符号分析(symbolic analysis)获取
![]()
的非零样式。分析的步骤包括了消去树(
elimination tree),计算消去树的后根次序(postordering),以及计算
![]()
的每一列的非零样式(即计算column counts)等等。
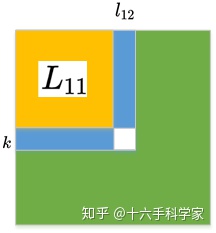
现在我们利用稀疏三角方程
![]()
作为基础,来实现
up-looking Cholesky分解。同样对
![]()
也做2*2的块分解。
从而得到三个方程:
![]()
;
![]()
;
第一个方程为递归求解;第二个方程为一个三角方程组求得
![]()
;第三个方程化简为
![]()
。从而看到每一次递归,可以依次从上向下求出矩阵
![]()
的行。并且可以看出,每一行的非零样式,是由第二个三角方程组可以得到的。可以参见:
十六手科学家:<读书笔记5>稀疏矩阵解三角方程组zhuanlan.zhihu.com
其伪代码为
好的,那么现在正式来介绍消去树。考虑到上面的三个方程中的
![]()
,向量
![]()
的转置即为
![]()
的第
![]()
行。所以他的非零样式
![]()
,其中
![]()
是
![]()
的有向图,
![]()
表示
![]()
的第
![]()
行的非零样式,
![]()
表示了矩阵
![]()
的第
![]()
列的上三角部分的非零样式。
那么如果得到
![]()
?通过对
![]()
深度优先搜索DFS可以实现。但是存在更简单的方法,仅需要耗时
![]()
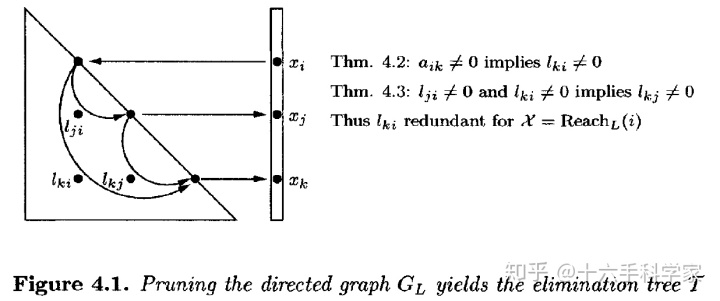
。此处依赖两个定理:
定理4.2,对于Cholesky分解
![]()
,如果
![]()
,则有
![]()
。
定理4.3,对于Cholesky分解
![]()
,如果
![]()
,则有
![]()
。
如上图所示,首先对于
![]()
,由定理4.2,保留了所有原始矩阵
![]()
的非零特性,在图中以实心圆表示。然后观察第一列
![]()
与
![]()
非零,所以由定理4.3在
![]()
中
![]()
非零,由
![]()
表示。然后再同理处理第二列,第三列......知道最后一列。即得到上图中的
![]()
非零样式。此时即完成了
符号分析。
那么如何得到消去树呢?
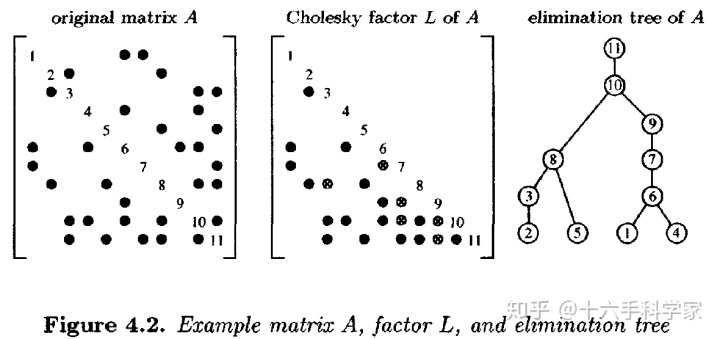
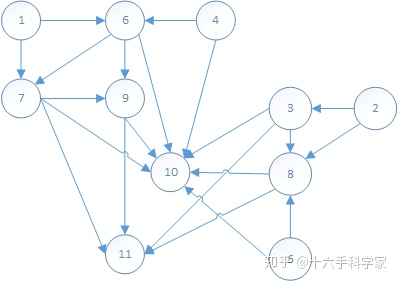
首先,可以通过对
![]()
的有向图,然后通过广度优先搜索(BFS)得到消去树。即依次对节点1至n,取距离当前搜索节点i最近的节点j作为parent,没有parent的节点作为tree的根。例如在图4.2的矩阵所对应的graph如下图,node(1)的在node(6,7)中取node(6)为父节点;node(2)在node(3,8)中取节点node(3)为父节点,node(3)在node(8,9,10)中取node(8)为父节点......从而构成了如上图的消去树。
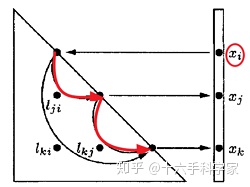
另外一种更为简单的方法。仍然见图4.1,因为存在一个path从
![]()
到
![]()
,并且经过
![]()
。所以在计算
![]()
的时候,并不需要遍历
![]()
。即如下图所示,仅需要按照红色path遍历,而经过
![]()
的黑色path是冗余的,不再需要遍历。从而对于任意节点
![]()
, 如果
![]()
从图中移除,对于
![]()
,同样不会影响path
![]()
。意味着移除这样的边,仅留下从节点
![]()
出发的最外层的边,并不会影响
![]()
。
即如果
![]() 为大于
为大于
![]() 的并且满足
的并且满足
![]() 的最近的节点,则对于所有
的最近的节点,则对于所有
![]() ,非零的
,非零的
![]() 都是冗余的。
都是冗余的。
这样的结果就是消去树。tree中节点
![]()
的父结点是
![]()
,
![]()
为第
![]()
列中从
![]()
到
![]()
的第一个非对角非零entry的行索引,(即
![]()
),如果第
![]()
列没有非对角非零项,节点
![]()
是树的根,它没有父结点。实际上消去树应该为forest,因为可能会有多个根,但是为了简便表达,就统一称之为tree。假设treed的edge是从child到parent的有向的。这里用
![]()
表示
![]()
的消去树。并且用
![]()
表示 即
![]()
的前
![]()
行与前
![]()
列构成的子矩阵
![]()
的消去树。
同样例如图4.2中的矩阵,第一列中,
![]()
与
![]()
非零,则取
![]()
所在行为6,所以node(1)的parent为node(6);第二列,
![]()
与
![]()
非零,则取
![]()
所在行为3,所以node(2)的parent为node(3).......知道最后一列。
证明了消去树的存在性;现在有必要计算它。还需要几个定理。
定理4.4 :对于Cholesky分解
![]()
,如果
![]()
,并且
![]()
,意味着在消去树
![]()
中,
![]()
是
![]()
的descendant,等价于
![]()
是
![]()
中的一个path。
定理4.5:
![]()
的第
![]()
行的非零样式
![]()
由下式得到:
![]()
。
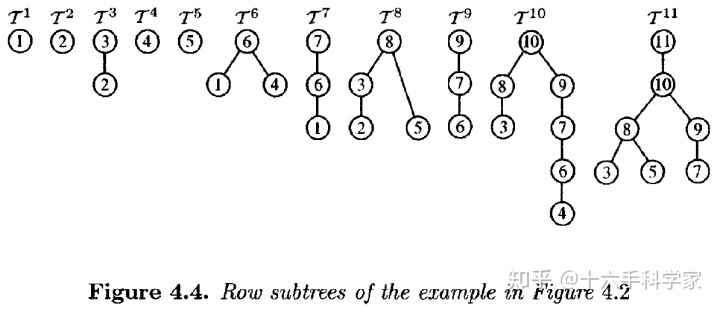
通过定理4.5可知,对于第
![]()
行的subtree
![]()
,是
![]()
的subtree。下图中为图4.2矩阵中的subtree。
定理4.6:对于消去树
![]()
中,
![]()
的每个descendant
![]()
。当且仅当
![]()
并且
![]()
,则节点
![]()
是
![]()
的一个叶。
推论4.7:对于Cholesky分解
![]()
,如果
![]()
,并且
![]()
,意味着在消去树
![]()
中,
![]()
是
![]()
的descendant,等价于
![]()
是
![]()
中的一个path。
定理4.4和推论4.7引出了一种算法,它在几乎
![]()
时间内得到消除树
![]()
。如果
![]()
已知,并且可知它为
![]()
的subtree。通过
![]()
计算
![]()
,
![]()
的children是一定能找到的(为
![]()
的root node)。由
![]()
推导出path
![]()
存在于
![]()
中,这条path在
![]()
中遍历直到达到跟节点。这个节点一定是
![]()
的child,原因是
![]()
是一定存在的。
cs_etree函数计算
![]()
的Cholesky分解的消除树(假设ata为False)。
如果cs_etree函数输入参数ata为真,则为在不形成
![]() 的情况下计算
的情况下计算
![]() 的消除树。这是列消去树(
的消除树。这是列消去树(
column elimination tree)。它将用于QR和LU因子分解算法。
| 函数 | 功能 |
|---|
| int *cs_etree (const cs *A, int ata) | 计算消去树用于Cholesky或者列消去树用于QR以及LU分解 |
| int *cs_idone (int *p, cs *C, void *w, int ok) | 返回一个int数组并释放workspace |







 本文是《Direct Methods for Sparse Linear Systems》读书笔记的第六部分,聚焦于稀疏矩阵的消去树(Elimination tree)概念。在Cholesky分解中,消去树用于减少计算复杂性,特别是对于对称正定矩阵。通过递归和三角方程组解决方法,解释了如何构建消去树,并介绍了相关定理和算法,包括cs_etree函数的使用。
本文是《Direct Methods for Sparse Linear Systems》读书笔记的第六部分,聚焦于稀疏矩阵的消去树(Elimination tree)概念。在Cholesky分解中,消去树用于减少计算复杂性,特别是对于对称正定矩阵。通过递归和三角方程组解决方法,解释了如何构建消去树,并介绍了相关定理和算法,包括cs_etree函数的使用。





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









