





北京交通大学电气工程学院、北京纵横机电科技有限公司的研究人员许中阳、郭希铮、邹方朔、游小杰、邱腾飞,在2019年《电工技术学报》增刊1上撰文指出,基于定子电流模型参考自适应的永磁同步电机无速度传感器控制算法简单,对参数扰动具有较强鲁棒性,适用于中高速运行场合下的转子位置估计。利用数字处理器执行无速度传感器控制算法时,需要将连续的电机时域模型转换为离散模型,常用的前向欧拉方法随着离散化步长的增加,已不能构造准确的可调模型。
本文以内置式永磁同步电机无速度传感器控制为目标,分析在开关频率变化时,七种不同离散化方法对于转子位置估计精度的影响。仿真与实验结果表明,当开关频率大于5kHz时,采用前向欧拉法或阶跃响应法,可以节省控制器运算资源,防止数字系统超限;在低开关频率2kHz下,采用斜坡响应变换法或时移阶跃响应变换法可兼顾转子位置估计精度与运算时长要求,更加适用于大功率、低开关频率的场合。
随着现代电力电子技术与电力电子器件的不断发展,电机控制技术由早期的工频驱动发展为变频控制调速,同时微电子技术与数字控制芯片运算能力的提高,使得交流调速系统可以有效实时数字化控制,具有更大的灵活性和可靠性。
为了节省成本,提高运行可靠性,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)无位置传感器矢量控制成为当下研究热点,根据电机运行速度的不同,PMSM无位置传感器控制方法整体可分为两大类:一类是适用于零速或低速的控制方法,在电机基波信号上施加外部激励信号,通过检测外加信号响应估计转子位置,由于电机运行时持续的激励注入,会不可避免地带来高频损耗、转矩脉动等问题。
另一类方法适用于中高速运行阶段,其本质是直接或间接地从电机反电动势信息中获取和转子位置有关的量,其中降维状态观测器(Reduced-Order Observer, ROO),稳定性好、鲁棒性强,但存在算法复杂、计算量大的问题。
扩展卡尔曼滤波器(Extended Kalman Filter, EKF),基于最小方均差误差理论,抗干扰能力强,缺点是会涉及到大量的矩阵运算。滑模观测器(Sliding Mode Observer, SMO),参数鲁棒性强,存在不可避免的抖动现象。
模型参考自适应法(Model Reference Adaptive System, MRAS)按照参考模型和可调模型的不同,又可分为基于定子电流的MRAS方法、基于定子磁链的MRAS方法、基于无功功率的MRAS方法。
基于无功功率的MRAS方法从稳态方程出发,动态性能较差;基于定子磁链的MRAS方法的参考模型由电机参数方程计算得到,对参数准确性有很强的依赖;而基于定子电流的MRAS方法将电机模型作为参考模型,从而避免了因参考模型不准确带来的影响。
结合上述分析,本文采用基于定子电流的MRAS方法作为无速度传感器控制的理论基础。
目前对于无速度传感器控制,多数学者致力于在全速度范围内进行转子位置有效估计的研究,在数字实现时开关频率较高。但在轨道交通大功率应用场合中,一般开关频率不会超过2kHz。
在基于定子电流的MRAS无速度传感器矢量控制中,为了能够在DSP等数字控制系统中实现转子位置的有效估计,一般通过电流或电压的差分方程将可调模型从连续域转换到离散域,求解过程至少含有一个微分环节,随着开关频率下降,数字控制离散化方法的精度及稳定性会受到迭代步长和迭代方法选取的影响。
为了讨论不同离散算法在低频采样计算下对于转子位置估计的影响,除了常用的前向欧拉法(Forward Euler, FE)外,本文又引入了后向欧拉法(Back Euler, BE)、近似梯形法(Approximate Trapezoidal, ATZ)、梯形法(Trapezoidal, TZ)、阶跃响应变换法(Step Invariant Transformation, SIT)、斜坡响应变换法(Ramp Invariant Transformation, RIT)、时移阶跃响应变换法(Time Shifted Step Invariant Transformation, TSSIT)六种不同的离散化方法作为可调模型数字离散化实现的手段,从离散精度、控制性能、运算步长、数字实现难易程度进行了综合对比分析,得到在较低开关频率下转子位置估计的最优离散化方法,理论分析及仿真结果都证明了该方法的正确性及可行性。
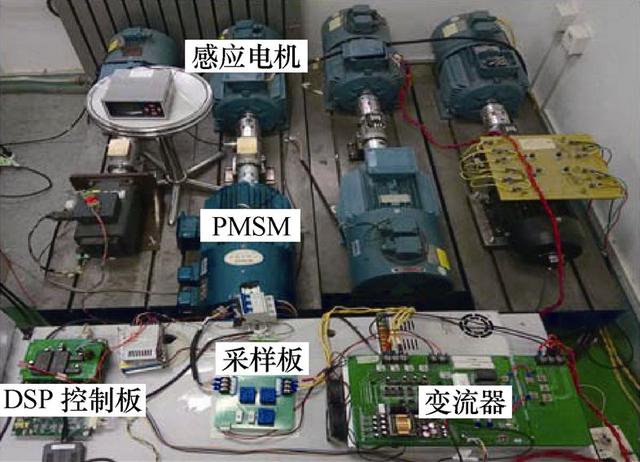
图10 永磁同步电机对拖实验平台
总结
本文深入剖析数字离散化方式对于PMSM转子位置估计的影响,将七种不同离散化方法应用于基于定子电流的MRAS系统中,发现在较低开关频率下,前向欧拉算法已不能在数字控制系统中构造较为准确的可调模型,这将影响转子位置估计的精确性。
理论分析和仿真实验结果表明,一阶精度SIT算法等同于FE算法,在低开关频率2kHz下,FE法与SIT法的转子位置估计误差最大,ATZ法的转子位置估计精度稍有提高,RIT法与TZ法的转子位置估计精度基本一致,且优于ATZ法。BE法与TSSIT法的转子位置估计误差最小。随着开关频率增加至5kHz,FE法、ATZ法、SIT法的转子位置估计精度明显提高,基本与TZ法、RIT法的估计精度一致,但对于BE法、TSSIT法的电角度估计精度改善并不显著。
综合考虑七种离散化方法的运行时长,在开关频率大于5kHz情况下,采用FE法可以节省运算资源,防止数字系统运算时间超限,在低开关频率2kHz下,采用RIT法或TSSIT法能够兼顾转子位置估计精度与运算时长要求,更加适合大功率牵引传动系统无速度传感器控制。















 393
393











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









