





 本文介绍曲轴位置传感器及其在发动机控制系统中的作用。该传感器通过不同原理(如磁电式、霍尔式和光电式)监测曲轴转动情况,与凸轮轴位置传感器配合确保精确的点火和喷油。此外,还探讨了信号处理方法和同步过程。
本文介绍曲轴位置传感器及其在发动机控制系统中的作用。该传感器通过不同原理(如磁电式、霍尔式和光电式)监测曲轴转动情况,与凸轮轴位置传感器配合确保精确的点火和喷油。此外,还探讨了信号处理方法和同步过程。
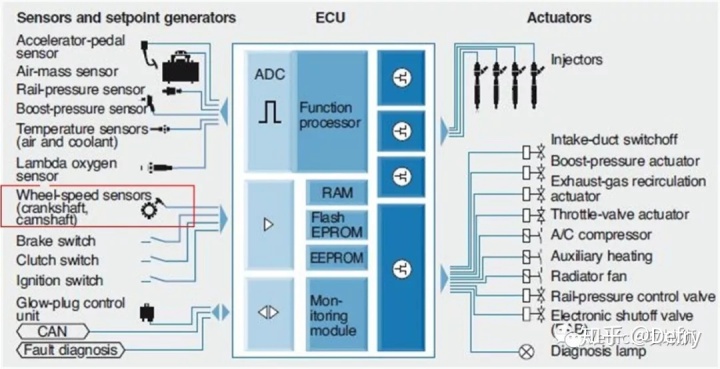
发动机为了实现精确的点火和喷油时刻控制必须知道各缸的位置和工作状态,这些信息的确定主要依赖于两个重要的传感器:曲轴位置传感器(Crankshaft Position Sensor)和凸轮轴位置传感器(Camshaft Position Sensor),曲轴位置传感器又称为发动机转速和曲轴转角传感器,其主要采集发动机的转动角度,从而获取发动机转速和各缸位置,而凸轮轴位置传感器又称为判缸传感器,其主要结合曲轴位置传感器信号确定各缸的工作状态(即各缸在进气、压缩、做功和排气的何种状态),通过两者的结合,最终实现顺序喷油点火控制、点火和喷油时刻控制及爆震控制等。当发动机上电启动时,必须实现EPM的快速同步,才能释放喷油和点火信号,最终达到启动成功的目的。
曲轴位置传感器按工作原理主要分为磁电式、霍尔式和光电式三种:

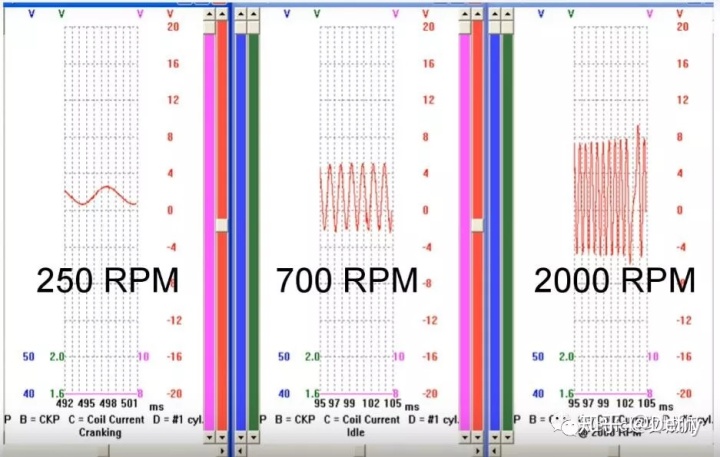
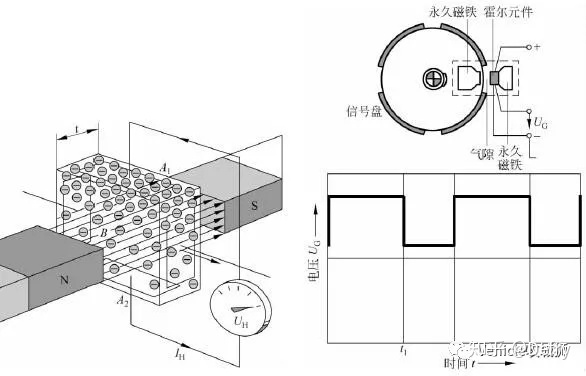
磁电式:是根据电磁感应定律,将转速变化引起的磁通量的相应变化转换成电信号来测量曲轴位置和转速。信号盘旋转时,当信号盘凸齿接近并对正电磁线圈时,磁场增强;当信号盘凸齿离开电磁线圈时,磁场减弱,这时会在感性线圈中产生交变的感应电动势,其频率和幅值将随发动机转速的升高而线性增大。这种传感器无需ECU额外供电、结构简单且成本低,因此被广泛使用。
霍尔式:一种利用霍尔效应的信号发生器,工作原理是当电流I通过放在磁场B中金箔薄片,且电流方向与磁场方向垂直时,这块金箔的横向两边会产生霍尔电压UH,产生的霍尔电压大小正比于通过金箔的电流和磁场的磁通密度。因此当信号盘上的叶片进入永久磁铁与霍尔组件之间的气隙时,霍尔触发器的磁场被叶片切断,此时不产生霍尔电压,传感器无输出信号;当信号盘上触发叶轮的缺口部分进入永久磁铁和霍尔组件之间的气隙时,霍尔电压升高,传感器输出电压信号。
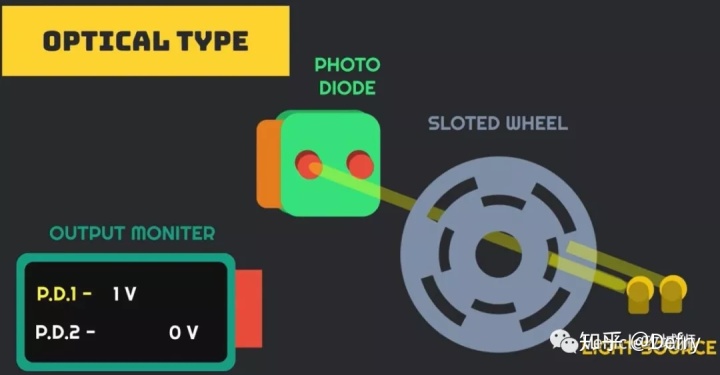
光电式:主要由发光二极管、光栅、光敏二极管等组成,其将发光元件发出的光束通过与曲轴同步旋转的带槽光栅盘之后,由光敏二极管接收,并将光信号转换成电信号输出。
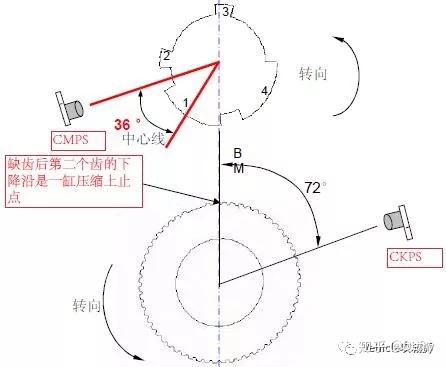
曲轴位置传感器一般固定安装在一定角度,其信号盘主要有四种:12-1齿、24-2齿、36-1齿和60-2齿,其中60-2齿是最常使用的,下图是曲轴位置传感器与60-2齿信号盘的安装示意图。
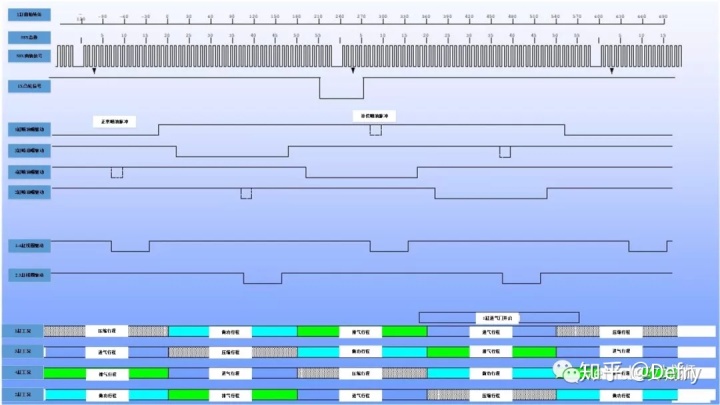
为了实现同步,首先需要识别出信号盘上的缺齿,磁电式传感器采集的信号需经处理得到方波信号再输入给EMS。
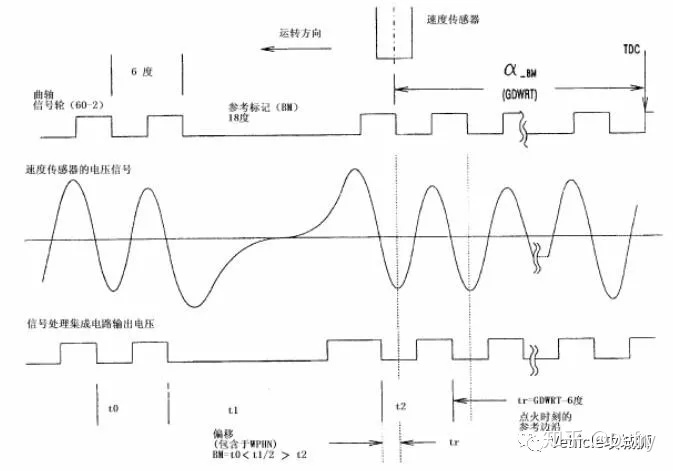
EMS会检测每齿信号的下降沿,并计算相临两齿信号下降沿之间的间隔时间T,然后记录并比较连续的三个时间间隔T1、T2、T3。
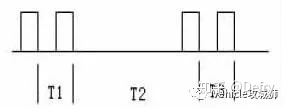
如果这三个连续的间隔时间T1、T2、T3 满足下面关系:
T2>1.5*T1 且T2>2*T3
则认为捕捉到了缺齿信号,且当前位置在第二个齿上,在理想情况下,如果从T1 到T3 期间,发动机保持转速不变,且T2 是缺齿时间,则T2=3*T1=3*T3,但考虑到转速会有波动,尤其在起动时,转速波动相对较大,所以在判断缺齿信号时,T2 与T1、T3 的比较都留有余量。除了在起动时要判断缺齿信号外,发动机正常运转时,EMS也需要重新判断一次缺齿信号,以便重新进行同步,防止因转速激烈波动或累积误差导致齿的计算混乱。
当识别出缺齿完成EPM同步,此时需要精确的点火时刻控制,例如对于采用36-1齿的V8发动机,其每个工作循环会有8次点火信号,即每转会有4次点火输出。
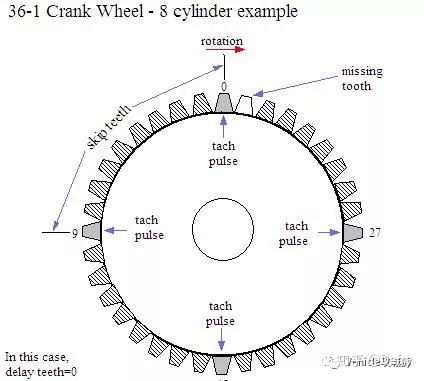

比如下次期望的点火提前角为36° BTDC,此时若9号齿正对上方时是L1的压缩上止点,那么需在0号齿正对上方时略过5.4个齿再释放点火信号,此时EMS会根据发动机状态将5.4个齿换算成时间并在特定定时器进行设置,从而在特定的时刻触发点火信号。当然本文只是简单讲了曲轴位置传感器的信号处理,其实在实际EMS中这部分处理逻辑在软件中是非常复杂的,童鞋们有兴趣的可继续仔细钻研,毕竟EPM这块属于复杂设备驱动,很多东西会比较晦涩难懂。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









