





文物是人类社会活动中保存下来的具有历史和科学研究价值的智慧结晶,建立文物器物精确的三维数字化模型,对文物保护研究、数据存档及应用展示等方面具有重要的应用价值。
目前文物三维重建的方法主要有摄影测量技术、三维激光扫描技术、结构光扫描技术。3D扫描仪MagicScan就是基于结构光扫描技术的三维扫描仪,集点云相机、纹理相机和光栅投影系统于一体,在投射特定的光信号到物体表面后,根据物体造成的光信号的变化来计算物体的位置等信息,获得包括数以百万、千万计的点云数据和全方位高清纹理像片数据,进而复原文物整个三维模型。下面对3D扫描仪如何进行文物器物三维模型重建以及模型的具体应用进行简单介绍。
1
三维扫描仪MagicScan的文物三维模型重建流程

图一 建模处理流程图
1.进行准备及设备连接。将仪器硬件按照标准安装好,在安装的过程中需要根据每件器物的大小来调整转台与扫描仪之间的距离以及相机倾斜角度,然后打开软件,检查设备连接情况,出现结构相机、纹理相机以及转台已连接成功后才能进行后续操作。

图二 硬件设备安装与连接
2.设备连接成功后进行标定。标定的目的是为了获得纹理相机、结构相机、转台之前的内部参数和外部参数而做的精度计算,通过标定获得物体相对于空间的位置关系以及内部之间的转换参数。在扫描前如果没有标定文件或者标定不合格,则无法进行扫描。其中标定分为外参标定、投影仪标定、转台标定,最后将这三种标定合并起来完成标定。
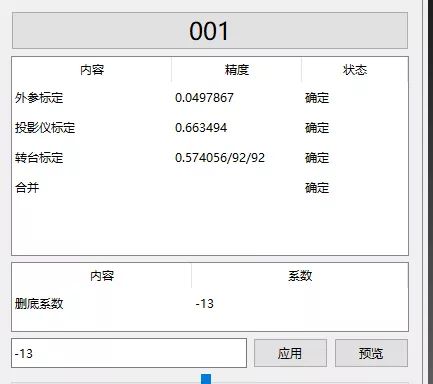
图三 标定合格
3.标定完成后开始扫描。根据每件文物的形状、大小及复杂程度确定扫描姿态及扫描次数。由于文物具有唯一性及珍贵性,应尽可能以少的姿态获取文物器物尽可能完整详尽的数据信息。当每个姿态扫描完成后,都会存在或多或少的噪声点云,这些噪声点云在扫描过程中是无法避免的,这就需要对每个姿态的点云数据进行编辑,删除多余的噪点。

图四 各个姿态扫描数据
4.扫描完成后对获取的点云数据进行对齐。因为每个姿态都是相对独立的坐标系,想要得到完整一致的点云数据就需要将各个姿态点云数据转换到同一个参考点云的坐标系下。这里的对齐方式有标记对齐和几何对齐,根据被扫文物的不同选择合适的对齐方式。对齐完成后还需要对点云进行一系列处理,包括去除孤立项、融合点云等,最终获得的是所有姿态点云的集合,也就是完整的点云数据。

图五 文物完整点云
5.对齐后需要对完整的点云数据进行三角网格化,得到文物完整的结构模型。只有将点云进行网格化后才能进行后续纹理贴图。网格化后的模型可能在一定程度上会存在细小漏洞,如果存在漏洞就需要进行补漏,补漏完成后就得到了文物完整的几何结构模型。从模型上看,纹理细节清晰,脉络分明。

图六 文物结构模型
6.文物的结构模型形成后需要对其进行纹理映射,使模型具有人眼感官的真实感。纹理映射也叫纹理贴图,其效果的好坏直接影响最终模型的展示。
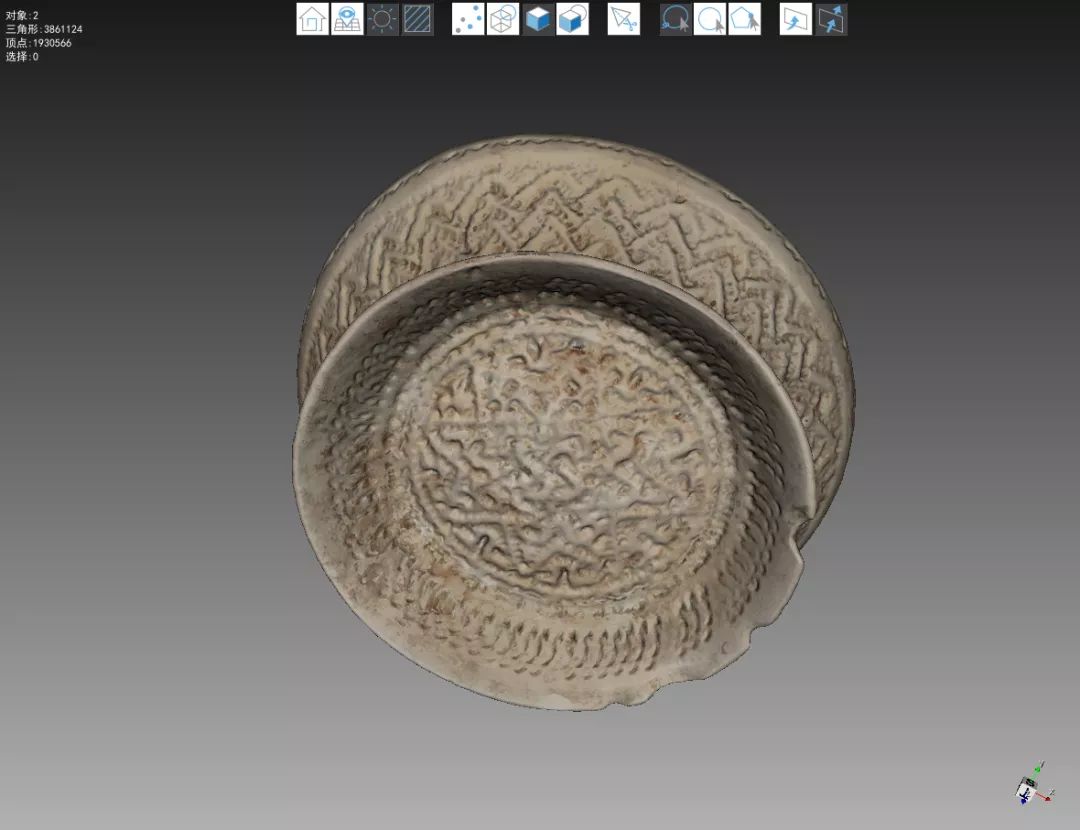
图七 文物可视化模型
2
文物器物三维模型的应用
文物三维模型的应用有很多,主要有导出高清图片(任意角度)、动态视频展示、测量距离、测量角度、测量表面积、测量体积等。这些应用为珍贵文物器物三维可视化研究以及文物数字化存档提供了有力的帮助。

图八 文物多角度高清图片

图九 动态视频展示

图十 测量直线距离

图十一 测量曲线距离

图十二 测量倾角

图十三 测量体积(器物本身)
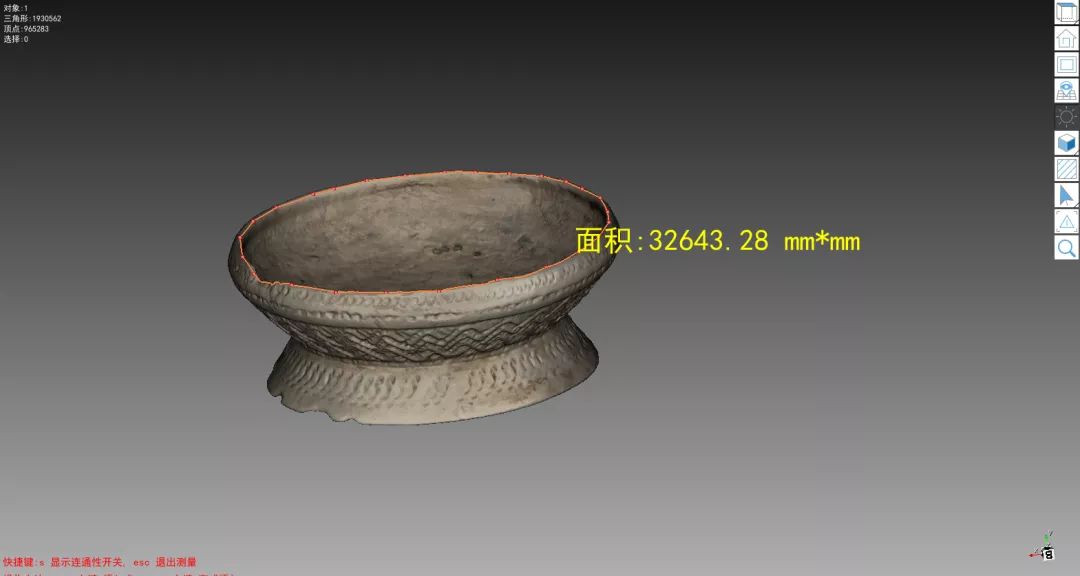
图十四 测量表面积(闭合曲线)

图十五 测量表面积(器物表面)
这类扫描器物的三维扫描仪也存在一些不足:其一,扫描瓶口特征特别狭小或者镂空结构比较复杂的器物时,很难扫描完全,从而采集不到器物内部的一些数据信息,这也是这类扫描仪的通病;其次,对扫描的器物大小有一定限制(最大直径为50cm),不过目前市面上已经有不同类型的三维扫描仪来针对不同大小的文物进行三维扫描建模。随着计算机信息化飞速的发展,三维扫描技术在不断更新,对文物进行数字化研究也越来越广泛,高精度的数字三维模型真实记录了文物表面形状、纹理、颜色等信息,为文物的保护研究、数字化存储和可视化展示提供了便利。

湖南考古
http://www.hnkgs.com/
长按识别二维码,关注我们















 3161
3161











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









