






最近我们新购买了英特尔的实感深度摄像机。它是由红外摄像机和普通的摄像机结合的传感器。这个传感器在网上找资料的时候评价很好,所以我们就买了这个传感器。这个传感器本身的价格也不贵,貌似折算成人民币要2400多块钱。作为动辄好几万好几万的自动驾驶常感器来说,这个传感器感觉还可以。对于动辄好几万的。自动驾驶传感器,比如激光雷达或者是gps惯性导航单元什么的,感觉这个传感器还是蛮便宜的。 还有一个选择这个传感器的原因就是,他是英特尔的。各种包的支持多一些。
我们希望用这个传感器基于ROS上开源的RTAB-map进行实时地图建模。至于为什么要用RTAB-map库,只有一个原因: 看起来很酷!(其实还有一个原因:课题需要。。。)
如果考虑未来的话,在自动驾驶中,可以用来实时建模,也可以提高识别物体的准确性。同时把行驶中的所有的深度传感器的数据整合起来,合成一个整体的地图的话,应该在制作高精技术的时候有所帮助。但是因为是用红外线的,识别的距离和精度都很有限,能不能用就看以后的测试结果了(不期待,性能很有限)。就算不是自动驾驶中使用,也可以用来在低速的移动机器人上面应用。
不管咋样,我就是看上了RTAB-map,太酷~
废话不多说,现在开始配置英特尔实感深度摄像机。
01. SDK安装&ROS catkin
实感深度摄像机,它本身是支持ROS的。而且我们现在的平台也是基于ROS的。所以我们安装这个驱动的时候,是要以在ROS上跑为目的而安装的。 所以,找到realsense ros的维基百科。也就是下面这个链接。当然,这个链接里面的内容不多,它更大的作用是提供很多很多传送门(链接)。
realsense2_camera - ROS Wikiwiki.ros.org进去之后读相关的文章,了解一下内容。之后我们要做的就是安装驱动。这里需要说明一下的就是安装驱动,安装ros kinetic, catkin workspace 的配置都是独立的。我们根据提供的安装链接进去,那么看见的就是下面第二个网站
intel-ros/realsensegithub.com
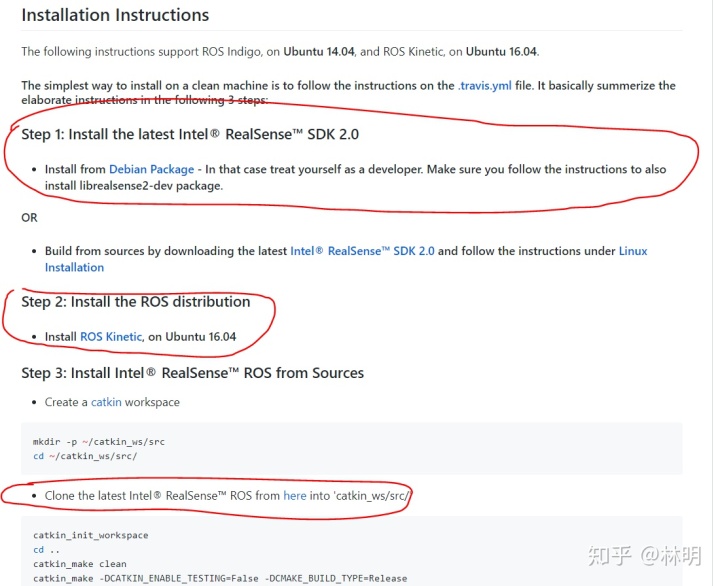
然后在这里想提醒一下的就是,尽量按照步骤一Debian的方式去安装SDK。 也就是下面这个链接。(下面图片,点击step1里面的Debian Package 时跳出的页面)。最后如果在ubuntu的terminal上输入realsense-viewer的时候,实感相机的摄像机数据和深度数据会显示在viewer上。这时候就说明SDK安装成功。(但是在这个步骤,你应该看不见这些图像会出现在viewer上,图像会显示frame not received in 5 seconds。。,怎么办?先不用管,继续跟着做)
IntelRealSense/librealsensegithub.com
然后就是第二步安装ROS。但在配置step1之前,我的电脑上就已经安装ROS。所以步骤一步骤二,没有一定的前后顺序。都是安装好就可以了。
第三个步骤中,想要提示一下的就是在我画红圈的地方别忘了下载那个文件,然后放到ROS的src里面。其余的跟着做就可以了。
在这个说明的最下面还有很多其他相关的内容,比如用多个摄像机的时候要怎么做,比如ROS的launch file 应该怎么跑。这边我还没有进行实测,所以就不多说了。
20200810 更新: 按照官方说明一般就可以。 但是如果出现找不到 realsense2 2.37版本,那么就去catkin_ws/src/realsense_ros/realsense2_camera/CMakeList.txt里面,找到find_package(realsense2 2.37.0)改为find_package(realsense2 2.36.0)
(If catkin_make reports errors, remove the installed realsense related with command at bottom of debian-package link)
那么好了,现在所有的东西都安装好了。然后,我们再打开terminal,输入realsense-viewer的时候,应该要显示什么东西了把?
还是不行
为什么?
因为,这个深度摄像机的初始firmware的版本太低。如果仔细看realsense-viewer的时候,在窗口的下面(还是右上角。。忘了)会有红色的小字显示,现在的firmware的版本太低,要达到minimum 要求。我觉得这个是个小坑,因为,安装的说明上没有说一定要更新firmware。。
02. Firmware update in ubuntu(16.04))
为什么一定要强调是在ubuntu上呢?因为以前是不可以在这个ubuntu系统上更新固件的,以前更新固件的话,一定要在windows的系统(10)里面更新。但是不知道什么时候他们更新了一下,让这个硬件可以在ubuntu上直接更新固件。
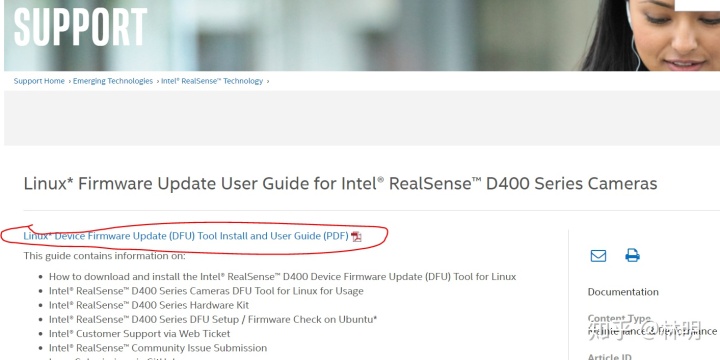
更新固件的方法也很简单,他们有一个详细的说明。就是下面这个链接。
Linux* Firmware Update User Guide for Intel® RealSense™ D400 Series...www.intel.com
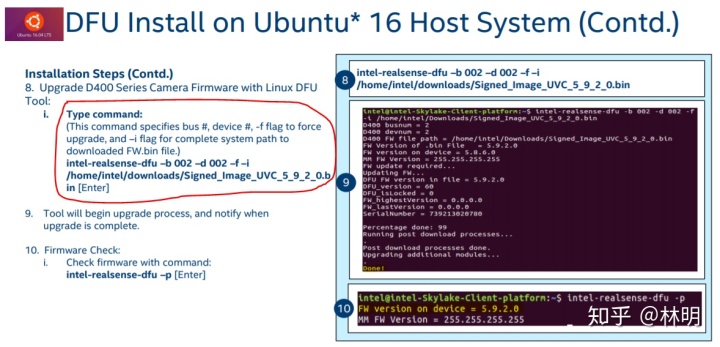
进去之后会看见下面图片一样的页面。点开被红圈圈出来的文件linux* Device 什么什么 user guide(pdf)。打开这个文件我们就可以根据文件中的8,9页的说明进行固件更新。
其他的步骤直接复制粘贴就可以啦。但是在第8步的时候,我出现了一些问题。嗯,我的智商出现了问题。
就是下面这个命令行中,不仅 -b 后的002, -d 后面的002 要根据自己情况更改,还需要更改的就是最后面的5 9 2 0.
5 9 2 0是什么呢?是固件软件的版本。
我们如果下载最新版的。固件升级文件的话,是 5 10 3 0. 所以这些数字也要换掉。也就是要指定好下载的Signed_Image。。。3_0.bin这个文件。
我今天一直就是输入5920,然后一直说他怎么就安装不上。最后花时间为自己的智商买了单。。。o(╥﹏╥)o
之后就简单了,更新固件只需要不到半分钟就完成了。
intel-realsense-dfu –b 002 –d 002 –f –i /home/intel/downloads/Signed_Image_UVC_5_9_2_0.bin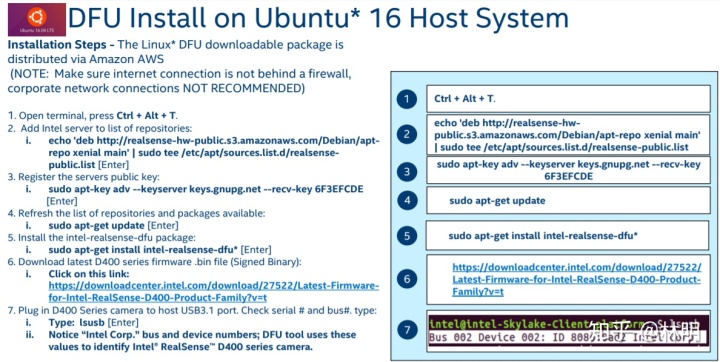
更新完固件。建议重新启动一下机器。然后在打开终端输入realsense-viewer,这时我们就可以看到图像传送到了viewer上。
ROS上有很多资源和example,大家可以参考参考。有好的资源也可以推荐推荐。
分享是个美德~
最终还是完成了安装。万幸。
如果没完成的话。那真是很遗憾。
毕竟一整天的大部分的时间都花在了更新这个固件上面。
有时候真的会为配置硬件花费很多的时间。希望这个文章可以为买这个设备的同学少浪费点时间。
20181108
家里
林明
20200915 update
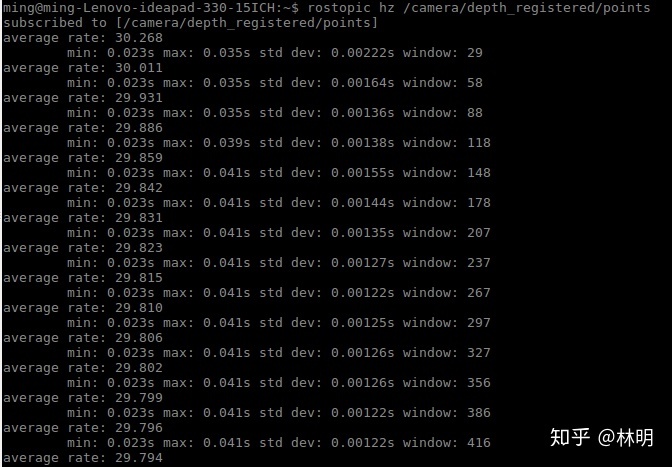
When we launch the rs_rgbd.launch file, then we can get the data with /camera/depth-registered/points which data type is sensor-msgs/Pointcloud2. The Hz of this data can be set in the rs-rgbd.launch file. The default value is 30. However from the rqt-topic monitor, we can find the HZ of this data is only about 0.61( actually, it drop from 60HZ just in 20 seconds).

However, when we use
rostopic hz /camera/depth-registered/points
then the frequency shows in the
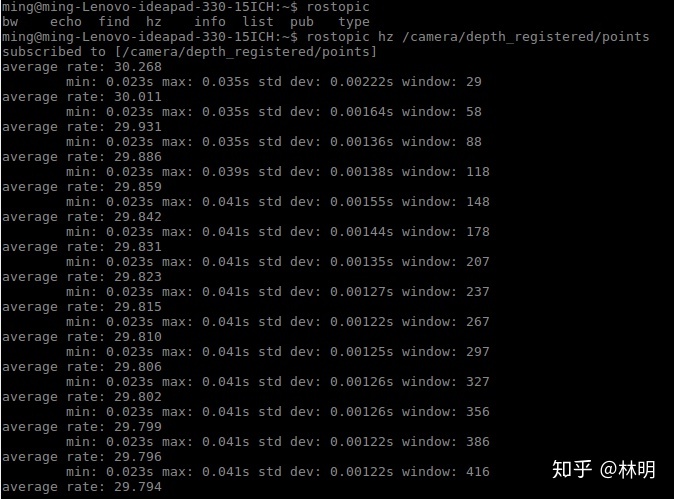 terminal as below figure.
terminal as below figure.
The realsense d435 connects to the computer directly and the computer spec is intel i7, 8th, 12GB.
附加脚本:
#! /bin/bash
# 1 install realsense sdk first
# ddynamic issues : missing dependency with ddynamic_reconfigure · Issue #812 · IntelRealSense/realsense-ros
sudo apt-get update
sudo apt-get install ros-kinetic-ddynamic-reconfigure
cd ~
sudo apt-key adv --keyserver OpenPGP Keyserver --recv-key C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C8B3A55A6F3EFCDE
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u
sudo rm -f /etc/apt/sources.list.d/realsense-public.list
sudo apt-get update
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
# With dev package installed, you can compile an application with librealsense using
# g++ -std=c++11 filename.cpp -lrealsense2Uninstalling the Packages:
#Important Removing Debian package is allowed only when no other installed packages directly refer to it. For example removing librealsense2-udev-rules requires librealsense2 to be removed first.
#Remove a single package with:
#sudo apt-get --purge <package-name>
#Remove all RealSense™ SDK-related packages with:
#dpkg -l | grep "realsense" | cut -d " " -f 3 | xargs sudo dpkg --purge
# 2 install ros package
cd ~/catkin_ws/src/
wget https://github.com/intel-ros/realsense/archive/2.1.3.zip
unzip realsense-2.1.3
#catkin_init_workspace
cd ..
#catkin_make clean
#catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make
catkin_make install
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt-get install ros-kinetic-rgbd-launch
roslaunch realsense2_camera rs_camera.launch
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









