






 本文介绍了全连接条件随机场(CRFs)作为深度学习图像分割后的优化方法,解释了其原理和优势,详细阐述了一元势和二元势函数,并提供了Python实现的准备工作和相关库的介绍。通过全连接CRFs,可以改善分类边界模糊和细碎错分区域,提升图像分割的准确性。
本文介绍了全连接条件随机场(CRFs)作为深度学习图像分割后的优化方法,解释了其原理和优势,详细阐述了一元势和二元势函数,并提供了Python实现的准备工作和相关库的介绍。通过全连接CRFs,可以改善分类边界模糊和细碎错分区域,提升图像分割的准确性。
前言
目前图像像素级语义分割比较流行使用深度学习全卷积神经网络FCN或者各种FCN的改进版U-Net、V-Net、SegNet等方法。这些模型中使用了反卷积层进行上采样操作,虽然能够将特征图恢复至原图尺寸,但也造成了特征的损失,自然而然产生了分类目标边界模糊的问题。为了得到更精确的最终分类结果,通常要进行一些图像后处理。全连接CRFs是在目前深度学习图像分割应用中常用的一种图像后处理方式,它是CRFs的改进模式,能够结合原始影像中所有像素之间的关系对深度学习得到的分类结果进行处理,优化分类图像中粗糙和不确定性的标记,修正细碎的错分区域,同时得到更细致的分割边界。
全连接CRFs原理
物体通常由大的空间相邻的区域表示,每个像素
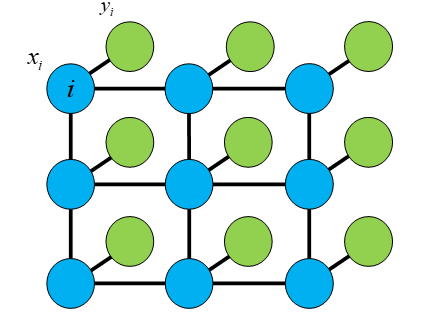
全连接CRFs与稀疏CRFs的最大差别在于:每个像素点都与所有的像素点相连接构成连接边。如果一张图像大小是256*256,那么就相当于有65536个像素点,因此如果采用全连接CRFs的话,那么就会构造出65536*65536条边。如果图像大小再大一些,那么就会变得十分恐怖,普通条件随机场推理算法根本行不通。这时,文献《Efficient Inference in Fully Connected CRFs with Gaussian Edge Potentials》给出了快速推理算法。接着我们就简单讲解具体的求解算法。
全连接条件随机场符合吉布斯分布,如下公式所示:
其中
其中的一元势函数用于衡量当像素点
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 550
550

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









