






并联机器人以其运行速度快、重复精度高,已经被广泛应用于食品加工、医药、3C产品制造行业中进行高速拾取工作。Roboguide作为一款机器人仿真软件,除了对串联机器人进行仿真以外,是否可以对并联机器人进行仿真呢?答案是肯定的。在进行仿真的过程中,机器人配合机器视觉、编码器等传感器,可实现输送带上输送物品的跟踪定位,并进行高速拾取与码放仿真。本期开始,就来为大家介绍一下Roboguide软件中机器人高速拾取应用的仿真,首先为大家介绍以下机器人系统的创建。
1.在开始菜单或桌面上点击“ROBOGUIDE”图标,打开Roboguide软件。然后点击“New Cell”图标或者点击依次点击“File”菜单→“New Cell”,弹出“Workcell Creation Wizard”窗口。第一步:工艺选择。点选“HandingPRO”,点击下方的“Next”按钮。
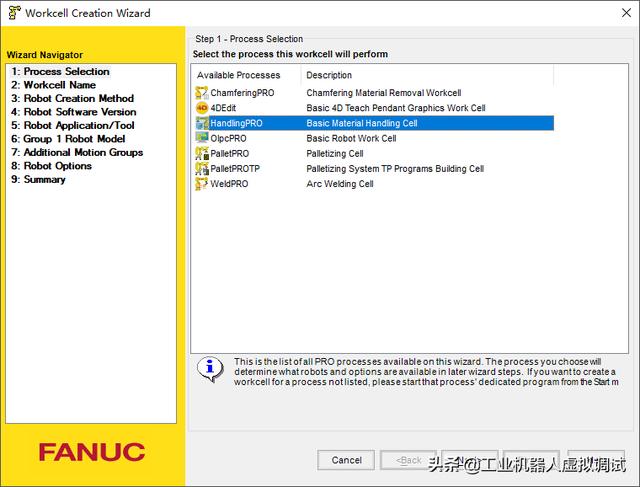
工艺选择
2.第二步:输入工作站名称。在Name后输入工作站名称,如High-speed pick up,点击“Next”按钮。
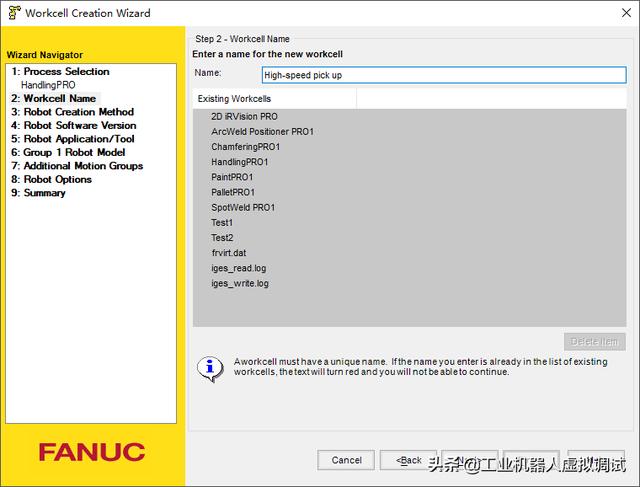
输入工作站名称
3.第三步:机器人创建方法选择。点选“Create a new robot with the default HandingPRO config.”,点击“Next”按钮。

机器人创建方法选择
4.第四步:选择机器人软件版本。这里选择最高版本(即V9.10),点击“Next”按钮。
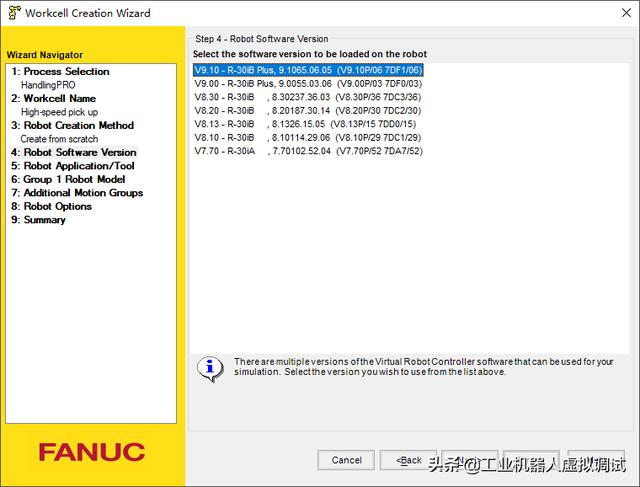
选择机器人软件版本
5.第五步:选择机器人应用软件与末端工具。这里点选HandingTool(H552),工具设置点选“Set Eoat later”,点击“Next”按钮。
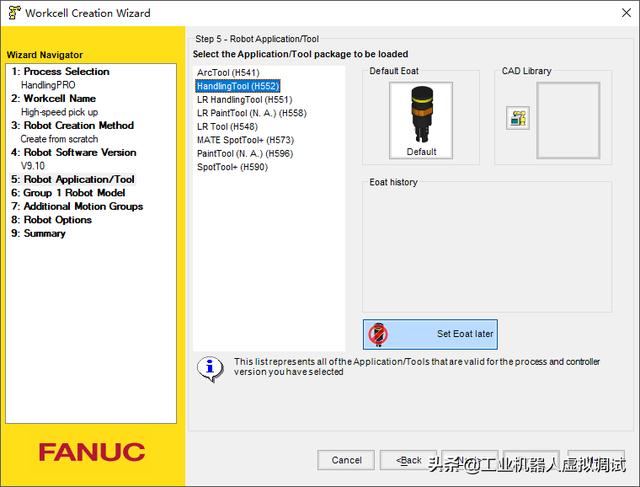
机器人应用软件与末端工具选择
6.第六步:机器人模型选择。这里选择机器人M-3iA/6A(H701),点击“Next”按钮。
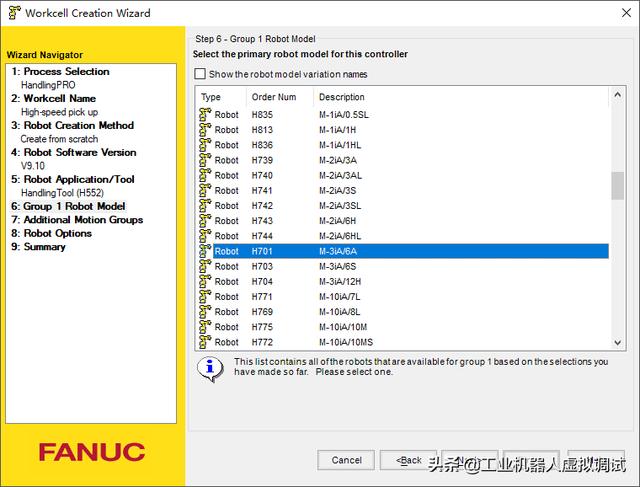
机器人模型选择
7.第七步:外部轴选择。本例无外部轴,因此保持默认设置,直接点击“Next”按钮。
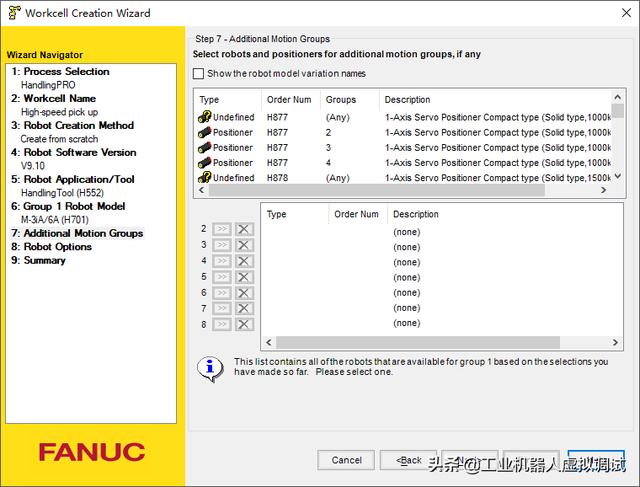
外部轴选择
8.第八步:机器人系统选择配置。Software Options属性标签下依次勾选J901 (iRVision 2DV)、J871 (iRVision UIF Controls )、J512 (Line Tracking),点击“Next”按钮。
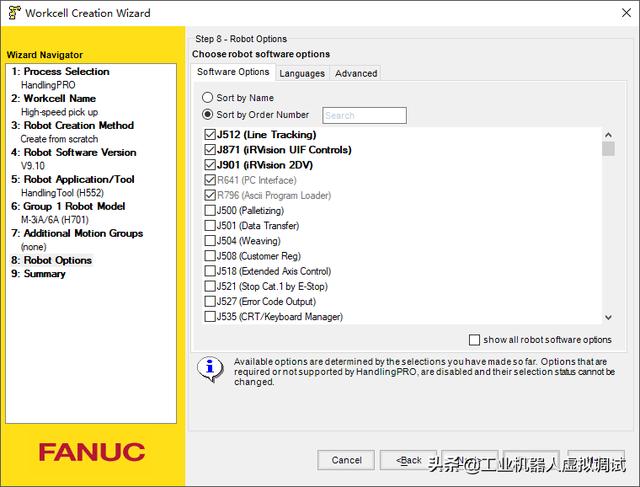
机器人系统选择配置
9.第九步:机器人系统摘要显示。查看各配置选项,确认无误后,点击“Finish”按钮。
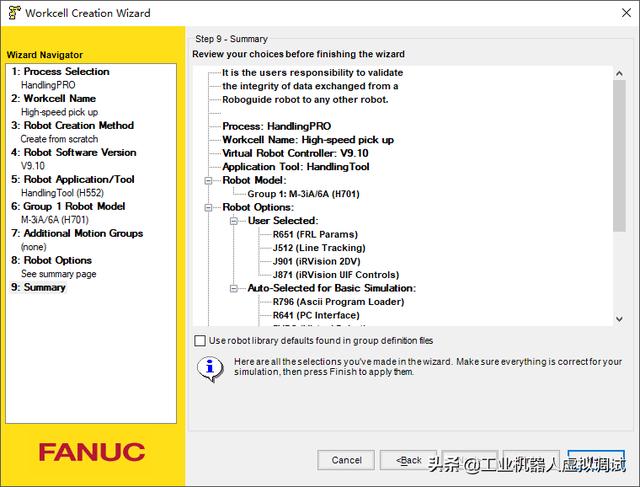
机器人系统摘要
10.机器人控制器开始初始化,稍等片刻后弹出“机器人控制器表单中的跟踪编码器改变,需要重启控制器。”提示框,点击确定按钮。
重启控制器提示框
重新启动完成后,软件工作区中出现并联机器人模型M-3iA/6A,机器人系统创建完成,点击上方的“Save Cell”工具按钮,保存工作站
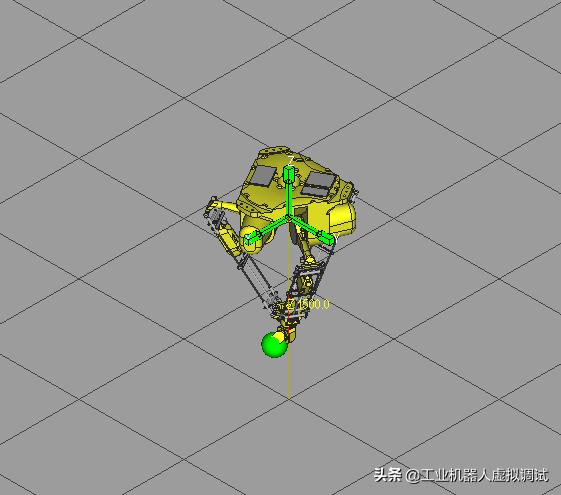
并联机器人模型
(未完待续)
上一篇:Roboguide软件:机器人顶吊安装方式系统参数配置















 9148
9148

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









