







1. 前言:
管程即monitor是阻塞式的悲观锁实现并发控制,CAS将通过非阻塞式的乐观锁的来实现并发控制
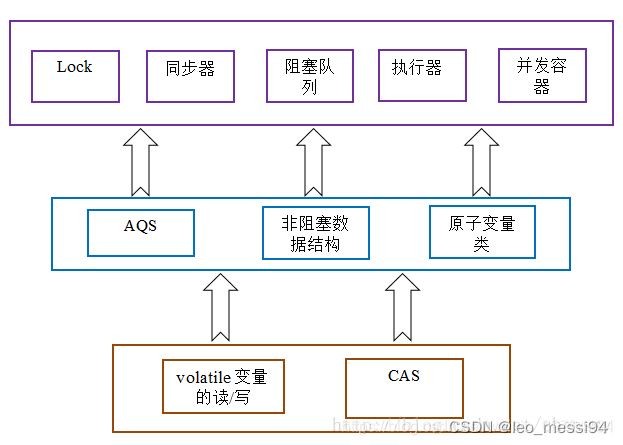
CAS,Compare And Swap(set),即比较并交换。Doug lea大神在同步组件中大量使用CAS技术鬼斧神工地实现了Java多线程的并发操作。整个AQS同步组件、Atomic原子类操作等等都是以CAS实现的,甚至ConcurrentHashMap在1.8的版本中也调整为了CAS+Synchronized。可以说CAS是整个JUC的基石。
2. 问题提出:
有如下需求,保证account.withdraw取款方法的线程安全:
public class Test5 {
public static void main(String[] args) {
Account.demo(new AccountUnsafe(10000));
}
}
class AccountUnsafe implements Account {
private Integer balance;
public AccountUnsafe(Integer balance) {
this.balance = balance;
}
@Override
public Integer getBalance() {
return balance;
}
@Override
public void withdraw(Integer amount) {
// 通过这里加锁就可以实现线程安全,不加就会导致结果异常
// synchronized (this){
balance -= amount;
//}
}
}
interface Account {
// 获取余额
Integer getBalance();
// 取款
void withdraw(Integer amount);
/**
* 方法内会启动 1000 个线程,每个线程做 -10 元 的操作
* 如果初始余额为 10000 那么正确的结果应当是 0
*/
static void demo(Account account) {
List<Thread> ts = new ArrayList<>();
long start = System.nanoTime();
for (int i = 0; i < 1000; i++) {
ts.add(new Thread(() -> {
account.withdraw(10);
}));
}
ts.forEach(Thread::start);
ts.forEach(t -> {
try {
t.join();
} catch (InterruptedException e) {
e.printStackTrace();
}
});
long end = System.nanoTime();
System.out.println(account.getBalance()
+ " cost: " + (end-start)/1000_000 + " ms");
}
}
2.1 解决思路1:加monitor锁
我们可以在余额修改的方法上加上monitor锁,来实现串行操作:
@Override
public void withdraw(Integer amount) {
// 通过这里加锁就可以实现线程安全,不加就会导致结果异常
synchronized (this){
balance -= amount;
}
}
2.2 解决思路2:通过无锁来解决:
相比于添加monitor锁,这种方式会耗费更少的资源。
class AccountSafe implements Account{
AtomicInteger atomicInteger ;
public AccountSafe(Integer balance){
this.atomicInteger = new AtomicInteger(balance);
}
@Override
public Integer getBalance() {
return atomicInteger.get();
}
@Override
public void withdraw(Integer amount) {
// 核心代码
while (true){
int pre = getBalance();
int next = pre - amount;
if (atomicInteger.compareAndSet(pre,next)){
break;
}
}
// 可以简化为下面的方法
// balance.addAndGet(-1 * amount);
}
}
3. CAS与volatile
前面看到的AtomicInteger的解决方法,内部并没有用锁来保护共享变量的线程安全。那么它是如何实现的呢?
@Override
public void withdraw(Integer amount) {
// 核心代码
// 需要不断尝试,直到成功为止
while (true){
// 比如拿到了旧值 100
int pre = getBalance();
// 在这个基础上 100-10 = 90
int next = pre - amount;
/*
compareAndSet 正是做这个检查,在 set 前,先比较 prev 与当前值
- 不一致了,next 作废,返回 false 表示失败
比如,别的线程已经做了减法,当前值已经被减成了 90
那么本线程的这次 90 就作废了,进入 while 下次循环获取新值重试
- 一致,以 next 设置为新值,返回 true 表示成功
*/
if (atomicInteger.compareAndSet(pre,next)){
break;
}
}
}
其中的关键是 compareAndSet,它的简称就是 CAS (也有 Compare And Swap 的说法),它必须是原子操作。
3.1 CAS:compareAndSet-比较并交换
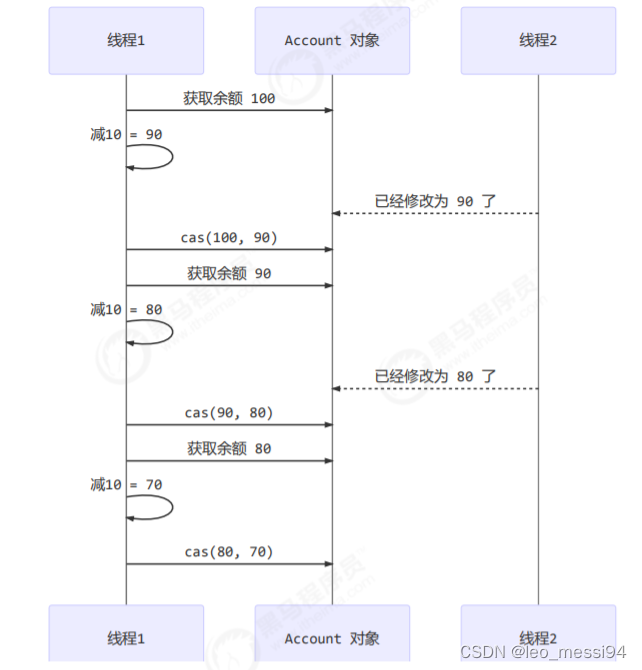
从图中我们可以看出compareAndSet的操作,就是拿着我想要设置的值和我获取到的值,去内存中匹配,如果我刚刚获取到的值与内存中的不一致,就重新进入while循环,再来一遍,直到我获取到的值与主存中的值一致,才能完成修改。
3.2 volatile:保证CAS的可见性
查看上述使用到的AtomicInteger的源码:
private volatile int value;
可以看到value是用volatile修饰了,保证了它的可见性,即在主存中被多个线程看到的时候都是同一个值。
它可以用来修饰成员变量和静态成员变量,他可以避免线程从自己的工作缓存中查找变量的值,必须到主存中获取它的值,线程操作 volatile 变量都是直接操作主存。即一个线程对 volatile 变量的修改,对另一个线程可见。
- 注意: volatile 仅仅保证了共享变量的可见性,让其它线程能够看到最新值,但不能解决指令交错问题(不能保证原子性)
CAS 必须借助 volatile 才能读取到共享变量的最新值来实现【比较并交换】的效果
4. 注意:CAS多核保证原子性实现方式:
CAS的底层是lock cmpxchg指令(X86架构),在单核CPU和多核CPU下都能够保证【比较-交换】的原子性, 即总线加锁:
4.1 总线加锁:
在多核状态下,某个核执行到带lock的指令时,CPU会让总线锁住,当这个核把此指令执行完毕,再开启总线。这个过程中不会被线程的调度机制所打断保证了多个线程对内存操作的准确性,是原子的。
4.2 缓存加锁:
总线加锁的方式有点儿霸道,不厚道,他把CPU和内存之间的通信锁住了,在锁定期间,其他处理器都不能其他内存地址的数据,其开销有点儿大。所以就有了缓存加锁。
其实针对于上面那种情况我们只需要保证在同一时刻对某个内存地址的操作是原子性的即可。
缓存加锁就是缓存在内存区域的数据如果在加锁期间,当它执行锁操作写回内存时,处理器不再输出LOCK#信号,而是修改内部的内存地址,利用缓存一致性协议来保证原子性。缓存一致性机制可以保证同一个内存区域的数据仅能被一个处理器修改,也就是说当CPU1修改缓存行中的i时使用缓存锁定,那么CPU2就不能同时修改缓存了i的缓存行。
5. 为什么无锁效率高
- 无锁情况下,即使重试失败,线程始终在高速运行,没有停歇,而 synchronized 会让线程在没有获得锁的时候,发生上下文切换,进入阻塞。打个比喻:线程就好像高速跑道上的赛车,高速运行时,速度超快,一旦发生上下文切换,就好比赛车要减速、熄火,等被唤醒又得重新打火、启动、加速… 恢复到高速运行,代价比较大
- 但无锁情况下,因为线程要保持运行,需要额外 CPU 的支持,CPU 在这里就好比高速跑道,没有额外的跑道,线程想高速运行也无从谈起,虽然不会进入阻塞,但由于没有分到时间片,仍然会进入可运行状态,还是会导致上下文切换。
6. CAS特点:
结合 CAS 和 volatile 可以实现无锁并发,适用于线程数少、多核 CPU 的场景下。
- CAS 是基于乐观锁的思想:最乐观的估计,不怕别的线程来修改共享变量,就算改了也没关系,我吃亏点再重试呗。
- synchronized 是基于悲观锁的思想:最悲观的估计,得防着其它线程来修改共享变量,我上了锁你们都别想改,我改完了解开锁,你们才有机会。
- CAS 体现的是无锁并发、无阻塞并发,请仔细体会这两句话的意思
- 因为没有使用 synchronized,所以线程不会陷入阻塞,这是效率提升的因素之一
- 但如果竞争激烈(写操作多),可以想到重试必然频繁发生,反而效率会受影响
7. CAS缺陷
CAS虽然高效地解决了原子操作,但是还是存在一些缺陷的,主要表现在三个方法:循环时间太长、只能保证一个共享变量原子操作、ABA问题。
7.1 循环时间太长
如果CAS一直不成功呢?这种情况绝对有可能发生,如果自旋CAS长时间地不成功,则会给CPU带来非常大的开销。在JUC中有些地方就限制了CAS自旋的次数,例如BlockingQueue的SynchronousQueue。
7.2 只能保证一个共享变量原子操作
看了CAS的实现就知道这只能针对一个共享变量,如果是多个共享变量就只能使用锁了,当然如果你有办法把多个变量整成一个变量,利用CAS也不错。例如读写锁中state的高地位
7.3 ABA问题
CAS需要检查操作值有没有发生改变,如果没有发生改变则更新。
但是存在这样一种情况:如果一个值原来是A,变成了B,然后又变成了A,那么在CAS检查的时候会发现没有改变,但是实质上它已经发生了改变,这就是所谓的ABA问题。
对于ABA问题其解决方案是加上版本号,即在每个变量都加上一个版本号,每次改变时加1,即A —> B —> A,变成A-1 —> B-2 —> A-3。














 463
463











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









