






基本元素图片
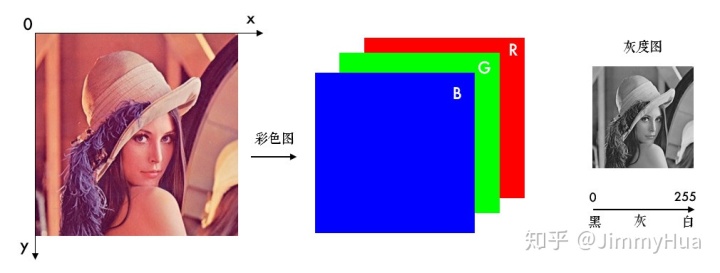
OpenCV中彩色图是以B-G-R通道顺序存储的,灰度图只有一个通道,图像坐标的起始点是在左上角,所以行对应的是y,列对应的是x。
import cv2
img = cv2.imread('lena.jpg',0)
# 先定义窗口,后显示图片
cv2.namedWindow('lena2', cv2.WINDOW_NORMAL)
cv2.imshow('lena', img)
k = cv2.waitKey(0)
# ord()用来获取某个字符的编码
if k == ord('s'):
cv2.imwrite('lena_save.bmp', img)1. cv2.imread(): - cv2.IMREAD_COLOR:彩色图,默认值(1) - cv2.IMREAD_GRAYSCALE:灰度图(0) - cv2.IMREAD_UNCHANGED:包含透明通道的彩色图(-1)
2. cv2.namedWindow()创建一个窗口 - 参数1依旧是窗口的名字 - 参数2默认是cv2.WINDOW_AUTOSIZE,表示窗口大小自适应图片,也可以设置为cv2.WINDOW_NORMAL,表示窗口大小可调 - 图片比较大的时候,可以考虑用后者。
摄像头
❗ ️详细内容参考:http://ex2tron.wang/opencv-python-open-camera/
要使用摄像头,需要使用cv2.VideoCapture(0)创建VideoCapture对象,参数0指的是摄像头的编号,如果你电脑上有两个摄像头的话,访问第2个摄像头就可以传入1,依此类推。
# 打开摄像头并灰度化显示
import cv2
capture = cv2.VideoCapture(0)
while(True):
# 获取一帧
ret, frame = capture.read()
# 将这帧转换为灰度图
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
cv2.imshow('frame', gray)
if cv2.waitKey(1) == ord('q'):
break按位运算
想把 OpenCV 的标志放到另一幅图像上。如果我使用加法颜色会改变,如果使用混合虽会得到透明效果,但是不想要透明。如果他是矩形我可以使用ROI。但是他不是矩形。但是我们可以通过按位运算实现。
import cv2
import numpy as np
# load图像
img1 = cv2.imread('lena.jpg')
img2 = cv2.imread('opencv-logo-white.png')
# 把logo放到图像左上角
rows, cols = img2.shape[:2]
roi = img1[:rows,:cols]
# 创建掩码
img2gray = cv2.cvtColor(img2,cv2.COLOR_BGR2GRAY)
ret, mask = cv2.threshold(img2gray, 10, 255, cv2.THRESH_BINARY)
# 逆掩码(背景白,logo黑)
mask_inv = cv2.bitwise_not(mask)
img1_bg = cv2.bitwise_and(roi, roi, mask=mask_inv)
#只提取出logo的像素
img2_fg = cv2.bitwise_and(img2, img2, mask=mask)
# 把前景和背景合并
dst = cv2.add(img1_bg, img2_fg)
# roi放入原图
img1[:rows,:cols] = dst
#显示
dd = np.hstack((img1_bg,dst))
cc = np.hstack((mask,mask_inv))
cv2.namedWindow('res',cv2.WINDOW_NORMAL)
cv2.namedWindow('rses',cv2.WINDOW_NORMAL)
cv2.imshow('res',cc)
cv2.imshow('rses',dd)
cv2.waitKey(0)
cv2.destroyAllWindows()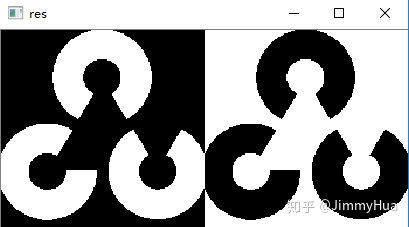

图像几何变换
- 实现旋转、平移和缩放图片
- OpenCV函数:cv2.resize(), cv2.flip(), cv2.warpAffine()
缩放:
OpenCV 提供的函数cv2.resize()可以实现,图像的尺寸可以自己手动设置虽你也可以指定缩放因子。我们可以选择择使用不同的插值方法。在缩放时我们推荐使用cv2.INTER_AREA虽在扩展时我们推荐使用v2.INTER_CUBIC较慢)和v2.INTER_LINEAR是cv2.INTER_LINEAR。
翻转:
镜像翻转图片,可以用cv2.flip()函数:
dst = cv2.flip(img, 1)其中,参数2 = 0:垂直翻转(沿x轴),参数2 > 0: 水平翻转(沿y轴),参数2 < 0: 水平垂直翻转。
平移:
如果需要沿 $(x,y)$方向移动,移动的距离是$(t_x,t_y)$,需要构建下面的移动矩阵:
你可以使用 Numpy 数组构建这个矩阵,数据类型是 np.float32,然后把它传给函数 cv2.warpAffine()。
# 平移图片
import numpy as np
rows, cols = img.shape[:2]
# 定义平移矩阵,需要是numpy的float32类型
# x轴平移100,y轴平移50
M = np.float32([[1, 0, 100], [0, 1, 50]])
# 用仿射变换实现平移
dst = cv2.warpAffine(img, M, (rows, cols)) #需要图像、变换矩阵、变换后的大小
cv2.imshow('shift', dst)
cv2.waitKey(0)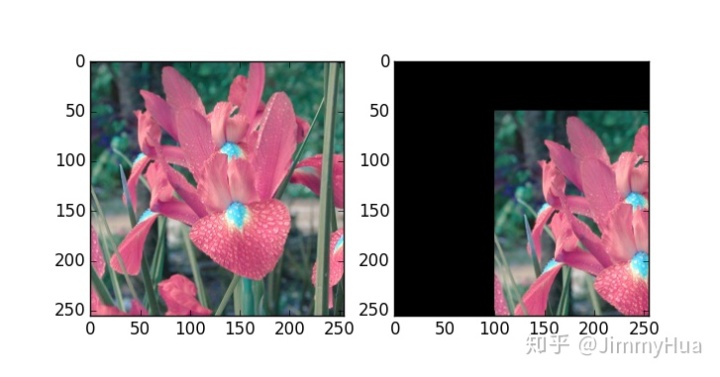
旋转:
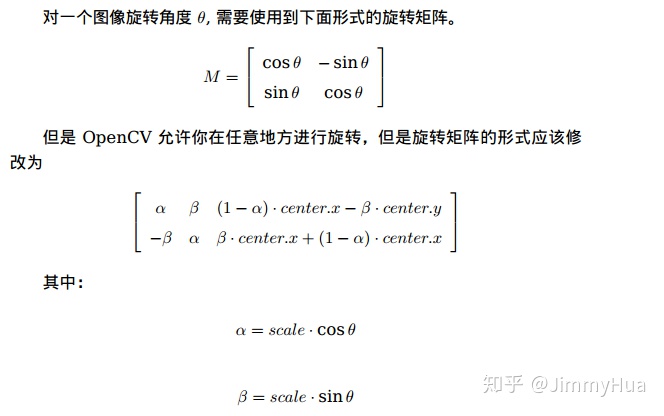
旋转同平移一样,也是用仿射变换实现的,因此也需要定义一个变换矩阵。OpenCV直接提供了 cv2.getRotationMatrix2D() 函数来生成这个矩阵,该函数有三个参数:
- 参数1:图片的旋转中心
- 参数2:旋转角度(正:逆时针,负:顺时针)
- 参数3:缩放比例,0.5表示缩小一半
# 45°旋转图片并缩小一半
M = cv2.getRotationMatrix2D((cols / 2, rows / 2), 45, 0.5)
dst = cv2.warpAffine(img, M, (cols, rows))
cv2.imshow('rotation', dst)
cv2.waitKey(0)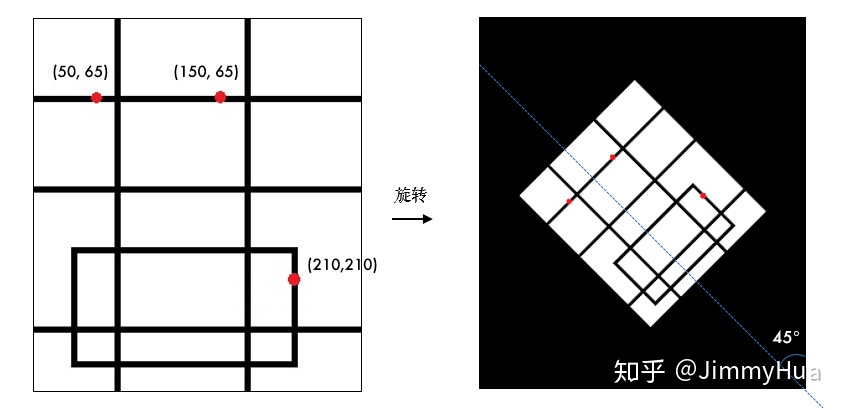
透视变换:
对于视觉变换虽我们需要一个3x3变换矩阵。在变换前后直线还是是直线。要构建这个变换矩阵,需要在图像上找4个点,以及他们在输出图像上对应的位置。这四个点中的任意三个点不能共线。这个变换矩阵可以有函数cv2.getPerspectiveTransform()构建。然后把这个矩俤传给函数cv2.warpPerspective。
img = cv2.imread('sudoku.jpg')
rows,cols,ch = img.shape
# 原图的四个点
pts1 = np.float32([[56,65],[368,52],[28,387],[389,390]])
# 输出图像的四个顶点
pts2 = np.float32([[0,0],[300,0],[0,300],[300,300]])
# 变换
M = cv2.getPerspectiveTransform(pts1,pts2)
# 仿射
dst = cv2.warpPerspective(img,M,(300,300))
# 显示
plt.subplot(121),plt.imshow(img),plt.title('Input')
plt.subplot(122),plt.imshow(dst),plt.title('Output')
plt.show()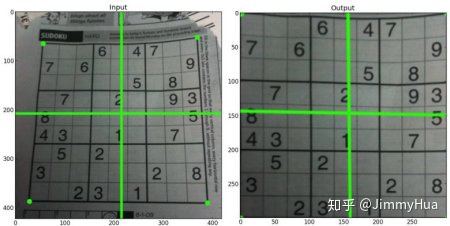
图像阈值
- ⛳️ 使用固定阈值、自适应阈值和Otsu阈值法”二值化”图像
- ⛳️ OpenCV函数:cv2.threshold(), cv2.adaptiveThreshold()
简单阈值
当像素值高于阈值时,我们给这个像素赋予一个新值(可能是白色),否则我们给它赋予另外一种颜色(可能是黑色)。这个函数就是 cv2.threshhold() 。
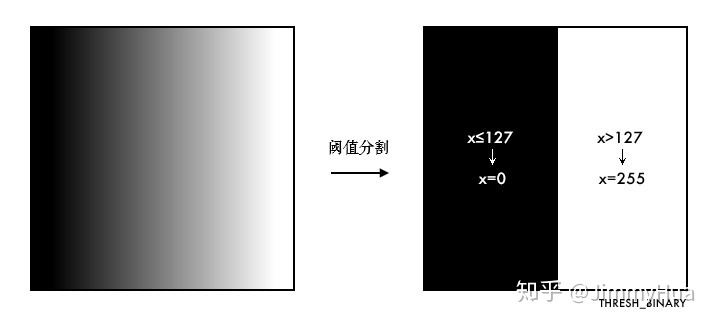
cv2.threshold() 用来实现阈值分割,ret是return value缩写,代表当前的阈值,暂时不用理会。函数有4个参数:
- 参数1:要处理的原图,一般是灰度图
- 参数2:设定的阈值
- 参数3:最大阈值,一般为255
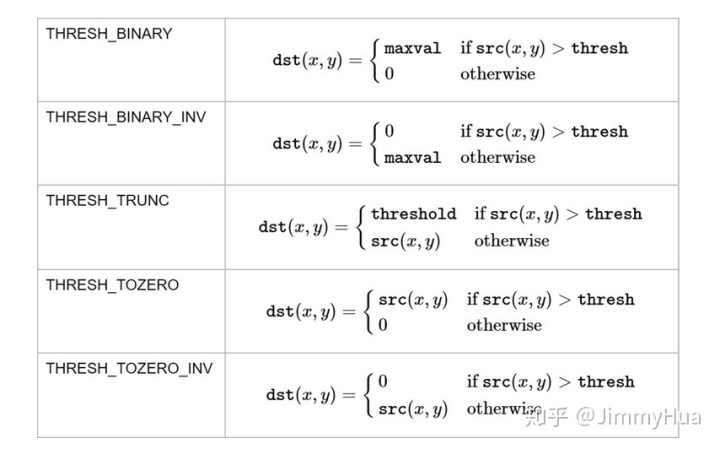
- 参数4:阈值的方式,主要有5种
- cv.THRESH_BINARY
- cv.THRESH_BINARY_INV
- cv.THRESH_TRUNC
- cv.THRESH_TOZERO
- cv.THRESH_TOZERO_INV
import matplotlib.pyplot as plt
# 应用5种不同的阈值方法
ret, th1 = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY)
ret, th2 = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY_INV)
ret, th3 = cv2.threshold(img, 127, 255, cv2.THRESH_TRUNC)
ret, th4 = cv2.threshold(img, 127, 255, cv2.THRESH_TOZERO)
ret, th5 = cv2.threshold(img, 127, 255, cv2.THRESH_TOZERO_INV)
titles = ['Original', 'BINARY', 'BINARY_INV', 'TRUNC', 'TOZERO', 'TOZERO_INV']
images = [img, th1, th2, th3, th4, th5]
# 使用Matplotlib显示
for i in range(6):
plt.subplot(2, 3, i + 1)
plt.imshow(images[i], 'gray')
plt.title(titles[i], fontsize=8)
plt.xticks([]), plt.yticks([]) # 隐藏坐标轴
plt.show()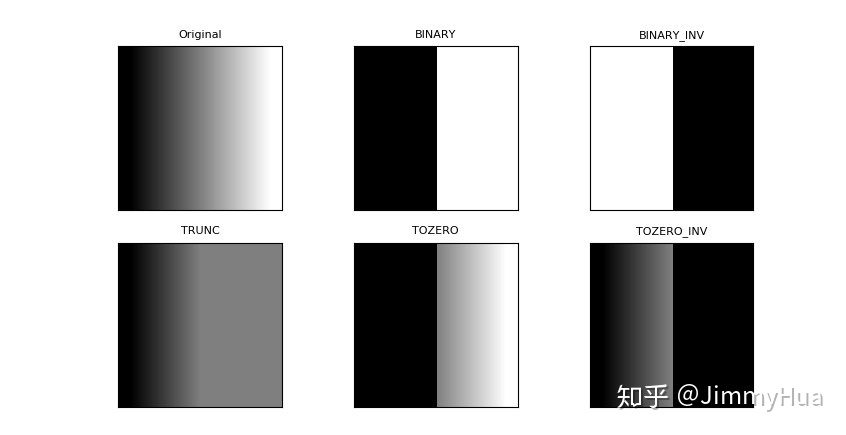
附表:
自适应阈值
固定阈值是在整幅图片上应用一个阈值进行分割,它并不适用于明暗分布不均的图片。 cv2.adaptiveThreshold()自适应阈值会每次取图片的一小部分计算阈值,这样图片不同区域的阈值就不尽相同,从而使我们能在亮度不同的情况下得到更好的结果。
img = cv2.imread('sudoku.jpg', 0)
#固定阈值
ret, th1 = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY)
#自适应阈值
th2 = cv2.adaptiveThreshold(
img, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 4)
th3 = cv2.adaptiveThreshold(
img, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 17, 6)
titles = ['Original', 'Global(v = 127)', 'Adaptive Mean', 'Adaptive Gaussian']
images = [img, th1, th2, th3]
#显示
for i in range(4):
plt.subplot(2, 2, i + 1), plt.imshow(images[i], 'gray')
plt.title(titles[i], fontsize=8)
plt.xticks([]), plt.yticks([])
plt.show()
- 参数1:要处理的原图
- 参数2:最大阈值,一般为255
- 参数3:小区域阈值的计算方式☘️
- ADAPTIVE_THRESH_MEAN_C:小区域内取均值
- ADAPTIVE_THRESH_GAUSSIAN_C:小区域内加权求和,权重是个高斯核
- 参数4:阈值方式(跟前面讲的那5种相同)
- 参数5:小区域的面积,如11就是11*11的小块
- 参数6:最终阈值等于小区域计算出的阈值再减去此值
Otsu阈值
大部分的图像处理任务都需要进行二值化处理,阈值的选取很重要,Otsu阈值法可以自动计算阈值,而且该方法非常适合双峰图片。
这里用到的函数是 cv2.threshold(),但是需要多传入一个参数(flag):cv2.THRESH_OTSU,这时把阈值设置为0。然后算法会找到最优阈值,这个最优阈值就是返回值 retVal。如果不使用 Otsu 二值化,返回的retVal 值与设定的阈值相等。
❓问:什么是双峰图片?
❗答:双峰图片就是指图片的灰度直方图上有两个峰值,直方图就是每个值(0~255)的像素点个数统计。
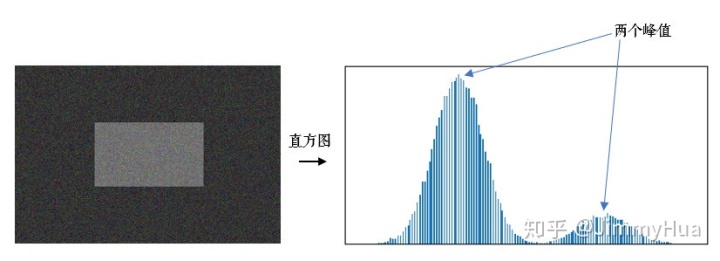
Otsu算法假设这副图片由前景色和背景色组成,通过统计学方法(最大类间方差)选取一个阈值,将前景和背景尽可能分开。
☘️下面这段代码对比了使用固定阈值和Otsu阈值后的不同结果:
☘️另外,对含噪点的图像,先进行滤波操作效果会更好。
import cv2
import matplotlib.pyplot as plt
img = cv2.imread('noisy.jpg', 0)
# 固定阈值
ret1, th1 = cv2.threshold(img, 100, 255, cv2.THRESH_BINARY)
# Otsu阈值
ret2, th2 = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
# 先进行高斯滤波,在使用Otsu阈值
blur = cv2.GaussianBlur(img, (5,5), 0)
ret3, th3 = cv2.threshold(blur, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
# 可视化
images = [img, 0, th1, img, 0, th2, blur, 0, th3]
titles = ['Original', 'Histogram', 'Global(v=100)',
'Original', 'Histogram', "Otsu's",
'Gaussian filtered Image', 'Histogram', "Otsu's"]
for i in range(3):
# 绘制原图
plt.subplot(3, 3, i * 3 + 1)
plt.imshow(images[i * 3], 'gray')
plt.title(titles[i * 3], fontsize=8)
plt.xticks([]), plt.yticks([])
# 绘制直方图plt.hist,ravel函数将数组降成一维
plt.subplot(3, 3, i * 3 + 2)
plt.hist(images[i * 3].ravel(), 256)
plt.title(titles[i * 3 + 1], fontsize=8)
plt.xticks([]), plt.yticks([])
# 绘制阈值图
plt.subplot(3, 3, i * 3 + 3)
plt.imshow(images[i * 3 + 2], 'gray')
plt.title(titles[i * 3 + 2], fontsize=8)
plt.xticks([]), plt.yticks([])
plt.show()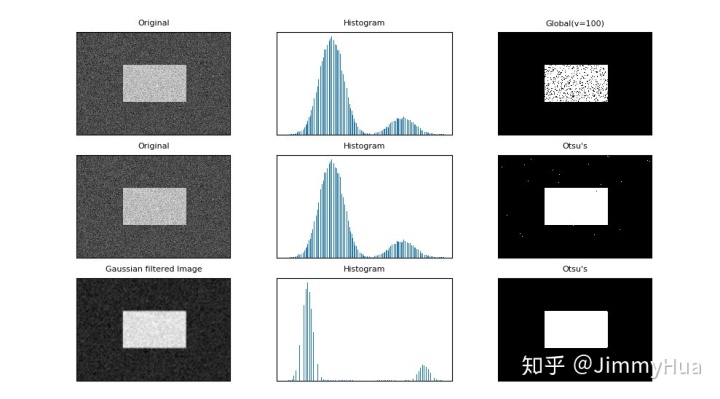
PS: 绘制直方图时,使用了numpy中的ravel()函数,它会将原矩阵压缩成一维数组,便于画直方图。
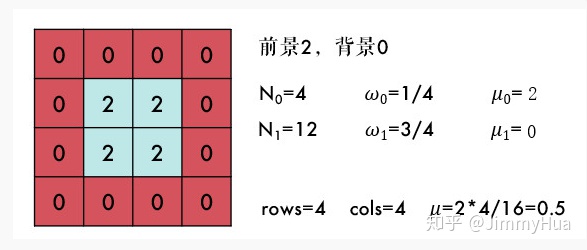
Otsu 算法详解: Otsu阈值法将整幅图分为前景(目标)和背景,以下是一些符号规定:
- T:分割阈值
- N0:前景像素点数
- N1:背景像素点数
- ω0:前景的像素点数占整幅图像的比例
- ω1:背景的像素点数占整幅图像的比例
- μ0:前景的平均像素值
- μ1:背景的平均像素值
- μ:整幅图的平均像素值
- rows×cols:图像的行数和列数 结合下图会更容易理解一些,有一副大小为4×4的图片,假设阈值T为1,那么:
其实很好理解,
整幅图的平均像素值就是:
此时,我们定义一个前景
将前述的1/2/3公式整合在一起,便是:
------------------------------------------可爱の分割线------------------------------------------
更多Opencv教程可以 Follow github的opencv教程,中文&English 欢迎Star❤️❤️❤️
https://github.com/JimmyHHua/opencv_tutorialsgithub.com参考
❗ ❗ ❗ Thanks: ❗ ❗ ❗
- ex2tron
- OpenCv















 1606
1606

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









