






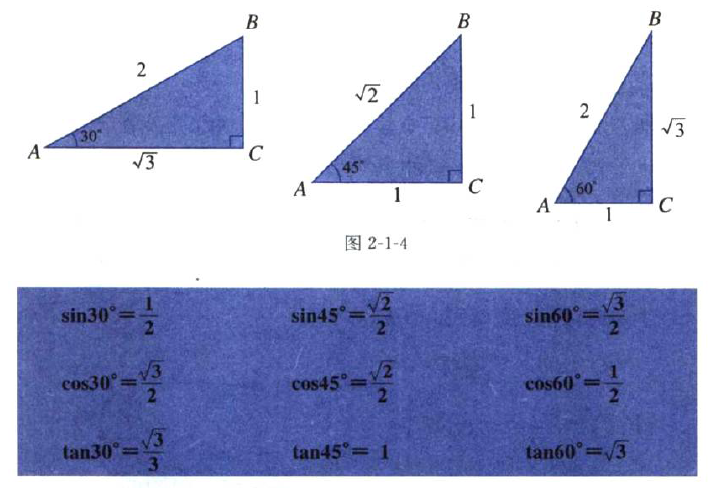
特殊三角形的sin,cos和tan
内角为30°,45°,60° 的特殊三角形,其三角比如下:
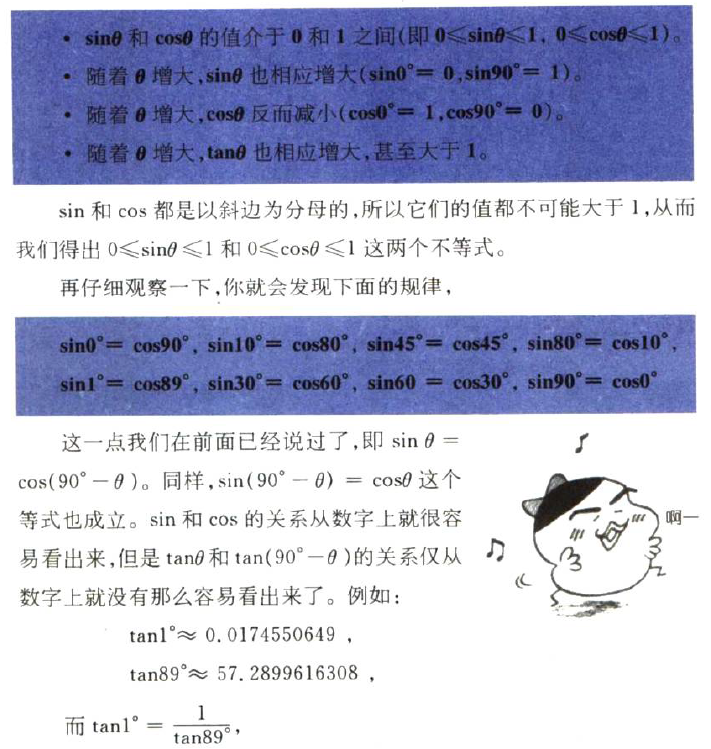
sin, cos, tan的一些规律
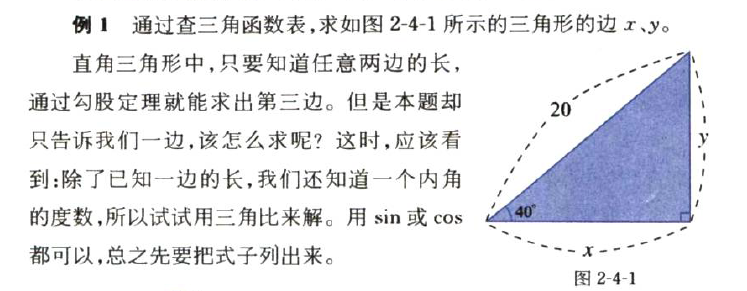
解题
如下题。
如果只是算一算x,y是多少没多少意思。
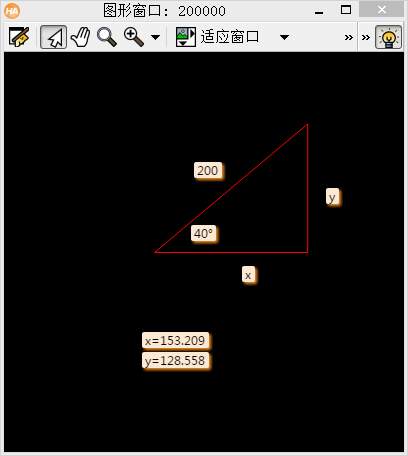
勇哥用halcon的算子来画出题意并解题。
下面的代码中,我们把c=20改为c=200,这样屏幕上的线条长一点方便观察。dev_close_window()
dev_open_window(0, 0, 400, 400, 'black', WindowHandle)
x:=[200,200]
y:=[150,350]
dev_set_color('red')
*显示线条x
disp_line(200000, x[0], y[0], x[1], y[1])
*200长的线转40度
hom_mat2d_identity(HomMat2DIdentity)
hom_mat2d_rotate(HomMat2DIdentity, rad(40), x[0], y[0], HomMat2DRotate)
affine_trans_point_2d(HomMat2DRotate, x[0], y[0], Qx1, Qy1)
affine_trans_point_2d(HomMat2DRotate, x[1], y[1], Qx2, Qy2)
disp_line(WindowHandle, Qx1,Qy1, Qx2,Qy2)
*求线y,它是垂足于x线的线
projection_pl(Qx2,Qy2,x[0],y[0],x[1],y[1],RowProj, ColProj)
disp_line(WindowHandle, Qx2,Qy2, RowProj, ColProj)
*擦掉多余的线
dev_set_color('black')
disp_line(WindowHandle,RowProj, ColProj, x[1], y[1])
dev_disp_text('x', 'window', 214, 238, 'black', 'box', ColProj)
dev_disp_text('y', 'window', 136, 322, 'black', 'box', ColProj)
dev_disp_text('200', 'window', 110, 190, 'black', 'box', ColProj)
dev_disp_text('40°', 'window', 173, 187, 'black', 'box', ColProj)
*本题的解
*x/200=cos(40)
*x=200*cos(40)
*y/200=sin(40)
*y=200*sin(40)
xlen:=200*cos(rad(40))
ylen:=200*sin(rad(40))
dev_disp_text('x=153.209', 'window', 280, 138, 'black', 'box', ColProj)
dev_disp_text('y=128.558', 'window', 300, 138, 'black', 'box', ColProj)
*用三平方定理验证结果是不是正确的
v1:=xlen*xlen+ylen*ylen
v2:=200.0*200.0
if((v1-v2)<0.0000001)
stop()
endif
我们来讨论一下这段代码中的几个halcon的知识点:
halcon的角度定义
下图是halcon的角度旋转坐标系。-0.5度就是基于模板,顺时针旋转了0.5度。

但是在模板匹配算子中,要看create算子是如何定义查找角度范围的,若定义0,rad(360),那么在小于1度的时候halcon会返回负值,在大于1度的时候根据你设定的0-360的范围,返回的是正角度。
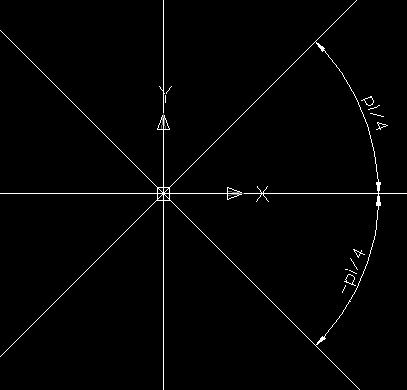
做为对比,我们看下角度在数学上直角坐标系上的定义如下:
第一象限逆时针的角是正,第四象限顺时针的角是负。
下图分别为: 45度,-45度。 或者表示弧度为pi/4, -pi/4
halcon的几个算子说明
rad() 角度转弧度
deg() 弧度转角度
注意在halcon或者C#中,sin,cos之类的三角函数都是需要转入弧度的。
转换公式:
radians(弧度) = (Math.PI / 180) * degrees
degrees(角度) = (180 / Math.PI) *radians
halcon中无理数的大小相等比较
cos(40), sin(40)都是无理数,在比较大小的时候不能是v1=v2
勇哥上了这个当,你查看变量值时,显示v1=40000.0, v2=40000.0,以为v1=v2?
其实是因为显示变量值时被四舍五入显示了。
所以勇哥只能使用下面的方式判定无理数和有理数相等。
如果读者有好办法,请告诉我。if((v1-v2)<0.0000001)
stop()
endif
计算点到线的垂线交点
halcon的算子是 projection_pl。
如果是C#,可以用下面的算法。public static double pointToLineDistance(double x1, double y1, double x2, double y2, double x3, double y3)
{
double normalLength = Math.sqrt((x2-x1)*(x2-x1)+(y2-y1)*(y2-y1));
return Math.abs((x3-x1)*(y2-y1)-(y3-y1)*(x2-x1))/normalLength;
}
另外,win10计算器开根号怎么玩?
科学模式,数字4左边那个按键
1 。输入要开方的数
2。点那个键
3。点要开几次方
例如求根号2: 先按2,再点
 ,最后按2, 结果是1.4142135623730950488016887242097
,最后按2, 结果是1.4142135623730950488016887242097
---------------------
作者:hackpig
来源:www.skcircle.com
版权声明:本文为博主原创文章,转载请附上博文链接!
#转载请注明出处 www.skcircle.com 《少有人走的路》勇哥的工业自动化技术网站。如果需要本贴图片源码等资源,请向勇哥索取。
收藏 | 0点赞 | 0打赏作者

















 817
817

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









