






上期介绍了这款伺服,支持CiA402驱动轨迹。所以,要驱动这款伺服电机动作的话,其编程跟以往的MR-JE-A、MR-JE-B都不太一样。本期简单介绍一下JE-C的编程。
相关手册:
《MR-JE-_C伺服放大器技术资料集》
《MR-JE-_C伺服放大器技术资料集(轨迹模式篇)》
《MR-JE-_C伺服放大器技术资料集(CC-Link IE现场网络Basic篇)》
CC-Link IE Field Basic设置
由于MR-JE-C是通过CC-Link IE Field Basic进行通信的,所以首先需要进行网络设置。
1.将CC-Link IE Field Basic设置为『使用』


如上设置,则映射如下(部分),以此类推:
以下说明详情请参考手册《CC-Link IE现场网络Basic篇》
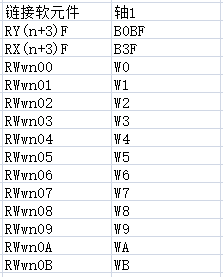
网络映射
控制位部分只需要用到RY(n+3)F、RX(n+3)F,关键在于控制字部分。

(上表为节选,详情参考手册《CC-Link IE现场网络Basic篇》第2章)
我们在编程时就是通过操作映射软元件来控制JE-C。比如设置轴1的转矩限制值(正),就通过操作W14(在本文设置例中,轴1的RWwn14对应为W14)来实现。
其中的index表示操作对象,我们实际上是通过操作相应的对象来实现控制(比如RWwn00对应index6060h)。具体可以参考手册『第7章:对象库』。
对象库中会说明每一个对象的名称与功能,比如:
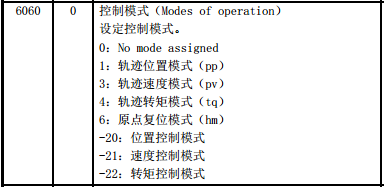
6060h:控制模式
使用示例:希望进行原点复位时,需要往6060h中写入『6』
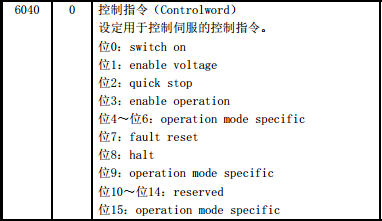
6040h:控制指令
这个index很关键,不管哪一种模式,pp、pv、tq、hm,包括伺服ON,都需要对它进行操作,具体操作请往后看。
以下说明详情请参考手册《轨迹模式篇》
伺服ON
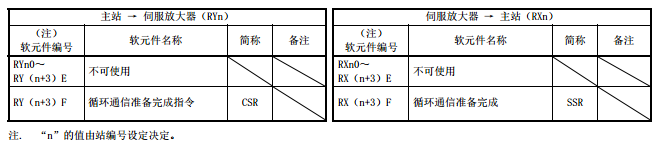
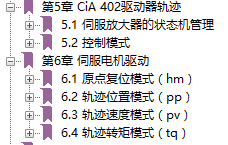
三菱以往的伺服都有伺服ON信号,但是JE-C没有所谓伺服ON信号,它是通过伺服放大器的状态机管理来进入各种状态。(手册第5章)
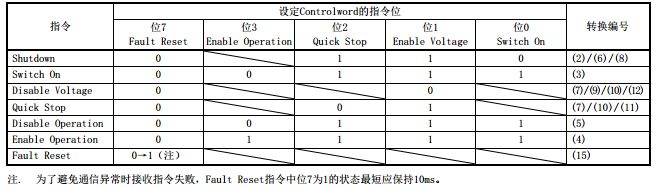
手册说明看起来比较复杂,实际上只需要让伺服进入『Enable Operation』状态即可实现伺服ON。
实现方法:
将index6040h设为『HF』
即将RWwn01设为『HF』
对于本文例轴1,即『MOV HF W1』
轨迹速度模式 (Profile velocity mode: pv)
对于JE-C来说,也没有所谓的JOG(点动操作)。实际上JOG就是给定一个速度,让伺服电机转动,所以可以通过pv模式来实现。
编程要点:
1.设置转矩限制值(60E0h、60E1h)
注意:不管什么profile模式,一定要初始化转矩限制值,否则电机不转动。
2.设置指令速度(6081h)
3.设置控制模式:pp(6060h)
4.将控制指令6040h bit15置ON。
其中bit8是各种模式都通用的停止信号。而bit15,置ON时电机转动,置OFF时电机停止,仅pv模式有效。
原点回归模式 、轨迹位置模式 、轨迹转矩模式 、网络映射的更改、伺服参数设置......未完待续......















 543
543











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









