





上一篇文章提到了如何实现目标检测工程落地的几个重要环节,一个是神经网络模型的训练,核心在于调参,针对不同对象训练出精度和速度较高的模型;另一个环节是将模型移植到嵌入式开发板中,核心在于函数集成,难点有相机图像的处理、C++接口函数的调用,输出接口的处理,编译也是较为麻烦的事情,添加开发板中所需的链接库,CMakelists文件编写等。这里仍然安利用Nvidia的开发板,界面还是友好些,与Pc端的编译环境差别不是很大,换成车载的控制器模块,所需的编译链接库就比较麻烦了,这个编译、链接有一次深刻的体验,感觉还是很酸爽的。
回归到本篇文章的重点,我们知道目标神经网络训练出的模型(这里先指2d检测),2d检测网络回归出的是一个2d检测框,输出内容有:[image_id, conf, label, xmin, ymin, xmax, ymax],image_id:图像的帧;conf:检测的置信度;label:检测物体的类别;xmin,ymin:检测框左上角的像素坐标归一化值;xmax,ymax:检测框右下角的像素坐标归一化值;
可以看到这些信息只能给出被检测物体在图像中的像素信息(定位)与类别信息(分类),在实际工程中,这些信息是远远不够的,比如本车前方检测到了有行人通过,此时应该及时刹车,刹车的前提是需要知道人与车之间的距离信息,所以检测加测距是分不开的,这样的感知才有意义;同样,实际检测过程中,外界环境复杂(光照、遮挡等)、相机会抖动等多因素影响,仅依赖检测的结果,检测框是很不稳定的,这里展示仅有检测和追踪的视频结果的对比:


可以看到,加入追踪后的检测框极其稳定,输出结果更平滑,几乎不存在抖动,同时还给出了不同物体的label,和同一类型物体的不同的id信息,既对不同物体做了区分,又对同一类型物体做了区分,即实现了多目标追踪;通过对轨迹特征的自动分析和提取,弥补视觉目标检测的不足,有效的去除错误的检测,增加遗漏的检测,为进一步的行为分析提供基础。
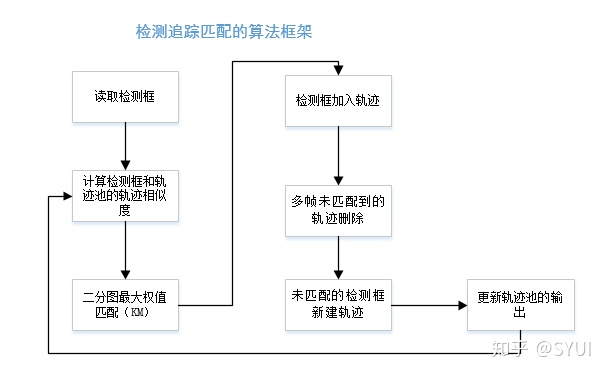
多目标追踪(Multi-object Tracking, MOT)有两种思路:一种是基于检测和匹配的方法,即通过目标检测结合帧间的数据关联来实现;基本思路是基于常规的目标检测算法(ssd/yolo/faster rcnn),将每一帧的目标检测出来,然后使用KM等匹配算法将相邻帧之间检测到的目标进行关联,得到每个特定目标的运动轨迹;最重要的方法是带权图模型。这里又分为离线跟踪算法和在线跟踪算法,离线跟踪算法主要是使用每一帧检测到的目标构成图的结点,基于运动、外观等参考量作为边的费用或权值(相似性度量),构造一个全局图结构,求解最短路径、最小费用流等得到最优结果;实时跟踪则直接使用KM算法求解相邻两帧的最优匹配。这种方法的核心主要是目标检测性能的好坏,帧间的匹配算法几乎是固定的,影响不大,目标检测器性能越好,最终的追踪输出效果也会更好。数据关联和目标检测是这个算法的核心。
第二种是基于单目标跟踪器的目标跟踪;因为多目标追踪相当于同时追踪多个目标,可以为每个目标分配一个跟踪器(KCF),然后间接使用匹配算法来修正那些跟踪失败或新出现的目标;这种方法很明显的劣势在于“吃硬件”,需要较高的计算力资源,工程中应用难度较大。当然还有基于神经网络的多目标跟踪算法,(基于YOLOV3和Deep_Sort实现的实时多人追踪)。
这里提供一些参考链接:
https://blog.csdn.net/zziahgf/article/details/85344859https://blog.csdn.net/xiao__run/article/details/84374959
具体的一些算法上文提到了,KM匹配算法、KCF(核相关滤波算法)、Deep-sort;针对自己的需要,可以有选择性的选择某类算法。
最后复盘总结一下,以百度Apollo3.5的感知框架图做说明:
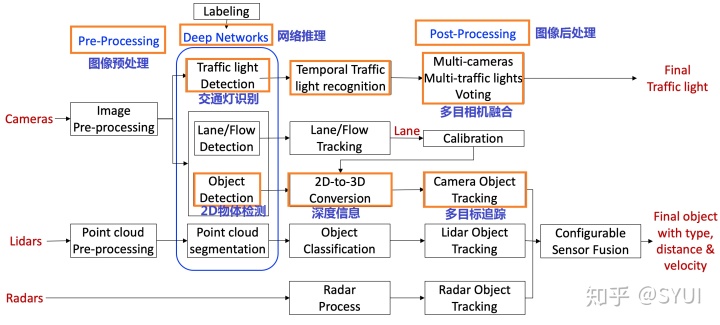
我们这里主要关注相机视觉感知的部分,重点在于标红框的部分,跟上一篇文章提到的图像预处理-->网络推理-->输出检测结果,可以看到在检测任务中,还需要加入深度信息-->多目标跟踪的后处理过程,这样最后的结果才是完善的。
下面这个视频较大,建议用wifi浏览,

这里展示的是对交通标识类小物体的检测追踪,要检测追踪车辆和行人,训练对于车辆行人相应的模型即可。
总结一下,目前主流的多目标追踪算法为分三类:
1.以匈牙利、KM匹配的后端追踪优化算法。(代表性的应用有SORT、DEEP-SORT),这类算法特点在于能达到实时性,但依赖于检测算法效果要好,特征区分要好,这样追踪效果会好,id切换少。相关论文和代码如下:
- DeepSort : Wojke, Nicolai and Bewley, Alex and Paulus, Dietrich "Simple Online and Realtime Tracking with a Deep Association Metric" [paper] [code] In ICIP 2017
- Sort : Bewley, Alex and Ge, Zongyuan and Ott, Lionel and Ramos, Fabio and Upcroft, Ben "Simple Online and Realtime Tracking"[paper] [code] In ICIP 2016.
2. 基于多线程的单目标跟踪器的多目标追踪算法(代表性的算法有KCF、LEDS),这类算法特点是 跟踪效果会很好,毕竟为每一类物体都单独分配了一个跟踪器。但该算法对目标尺度变化要求较大,参数调试需要合理,同时该算法极耗cpu资源,实时性不高。
3. 基于深度学习的多目标跟踪算法。现阶段end-to-end的算法还不多,大多处于实验室刷榜阶段,有进一步落地应用的及时更新。相关论文和代码如下:
列个提纲,近期会更新多目标跟踪的内容,敬请期待~
各位看官收藏的同时,顺便点个赞吧
ヾ(≧∪≦*)ノ〃
完!
未经授权,请勿转载。















 1200
1200

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









