





kd-tree是在进行激光点云编程中经常使用的一个工具,我们平时使用的时候可能就是使用其中的一小部分的内容,并未对其进行很深的思考。那么kd-tree的原理到底是什么呢?我们又经常使用哪些常用函数呢?
本片文章将对kd-tree进行细致的整理,方便以后的使用和阅读。
1、简介
kd-tree简称k维树,是一种空间划分的数据结构。常被用于高维空间中的搜索,比如范围搜索和最近邻搜索。kd-tree是二进制空间划分树的一种特殊情况
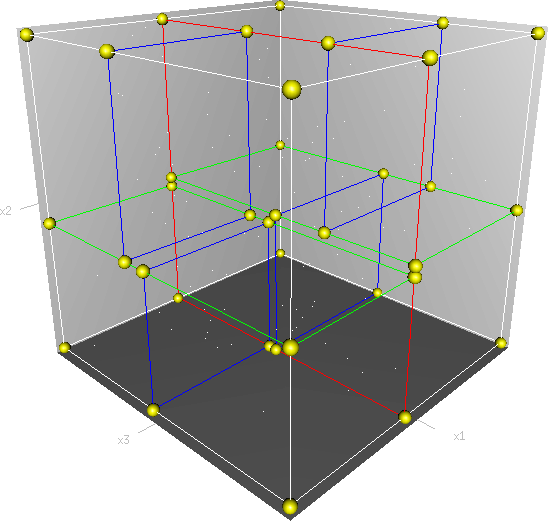
在激光雷达SLAM中,一般使用的是三维点云。所以,kd-tree的维度是3。
由于三维点云的数目一般都比较大,所以,使用kd-tree来进行检索,可以减少很多的时间消耗,可以确保点云的关联点寻找和配准处于实时的状态。
本篇文章将从原理层面讲解kd-tree,以便大家在使用中,可以有着更深刻的理解。
2、原理
2.1、数据结构
kd-tree,是k维的二叉树。其中的每一个节点都是k维的数据,数据结构如下所示
struct 上面的数据在进行算法解析中,并不是全部都会用到。一般情况下,会用到的数据是{数据矢量,切割轴号,左支节点,右支节点}。这些数据就已经满足kd-tree的构建和检索了。
2.2、构建kd-tree
kd-tree的构建就是按照某种顺序将无序化的点云进行有序化排列,方便进行快捷高效的检索。
构建算法:
Input这样的化,就可以构建出一颗完整的kd-tree了。
拿个例子说明为:
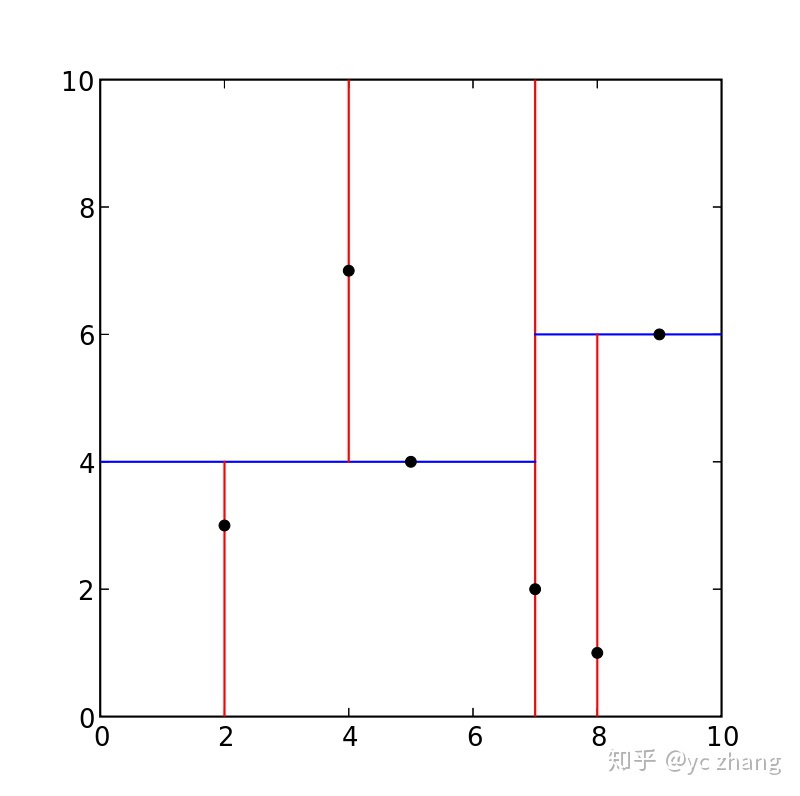
二维样例:{(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)}
构建步骤:
1、初始化分割轴:
发现x轴的方差较大,所以,最开始的分割轴为x轴。
2、确定当前节点:
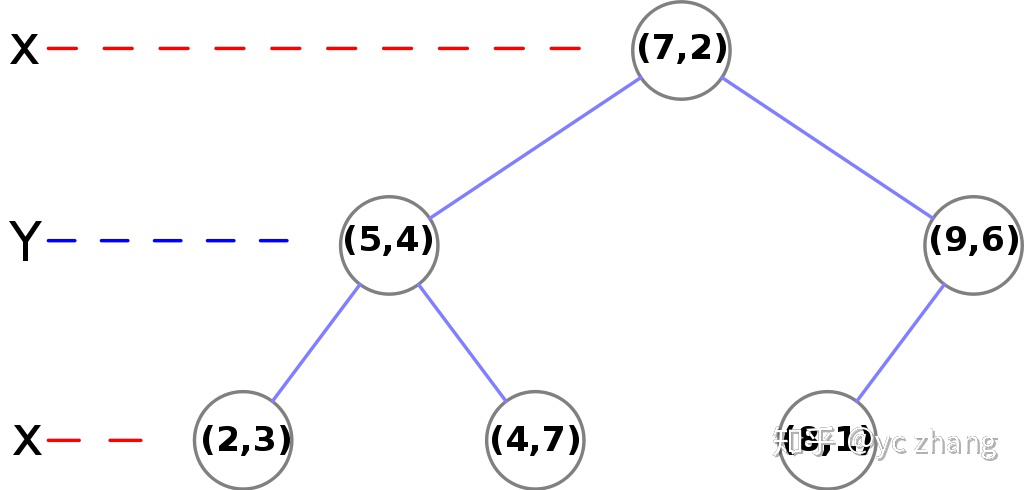
对{2,5,9,4,8,7}找中位数,发现{5,7}都可以,这里我们选择7,也就是(7,2);
3、划分双支数据:
在x轴维度上,比较和7的大小,进行划分:
左支:{(2,3),(5,4),(4,7)}
右支:{(9,6),(8,1)}
4、更新分割轴:
一共就两个维度,所以,下一个维度是y轴。
5、确定子节点:
左节点:在左支中找到y轴的中位数(5,4),左支数据更新为{(2,3)},右支数据更新为{(4,7)}
右节点:在右支中找到y轴的中位数(9,6),左支数据更新为{(8,1)},右支数据为null。
6、更新分割轴:
下一个维度为x轴。
7、确定(5,4)的子节点:
左节点:由于只有一个数据,所以,左节点为(2,3)
右节点:由于只有一个数据,所以,右节点为(4,7)
8、确定(9,6)的子节点:
左节点:由于只有一个数据,所以,左节点为(8,1)
右节点:右节点为空。
最终,就可以构建整个的kd-tree了。
示意图如下所示
二维空间表示:
kd-tree表示:
2.3、最近邻检索
在构建了完整的kd-tree之后,我们想要使用他来进行高维空间的检索。所以,这里讲解一下比较常用的最近邻检索,其中范围检索也是同样的道理。
最近邻搜索,其实和之前我们曾经学习过的KNN很像。不过,在激光点云章,如果使用常规的KNN算法的话,时间复杂度会空前高涨。因此,为了减少时间消耗,在工程上,一般使用kd-tree进行最近邻检索。
由于kd-tree已经按照维度进行划分了,所以,我们在进行比较的时候,也可以通过维度进行比较,来快速定位到与其最接近的点。由于可能会进行多个最近邻点的检索,所以,算法也可能会发生变化。因此,我将从最简单的一个最近邻开始说起。
- 一个最近邻
一个最近邻其实很简单,我们只需要定位到对应的分支上,找到最接近的点就可以了。
举个例子:查找(2.1,3.1)的最近邻。
- 计算当前节点(7,2)的距离,为6.23,并且暂定为(7,2),根据当前分割轴的维度(2.1 < 7),选取左支。
- 计算当前节点(5,4)的距离,为3.03,由于3.03 < 6.23,暂定为(5,4),根据当前分割轴维度(3.1 < 4),选取左支。
- 计算当前节点(2,3)的距离,为0.14,由于0.14 < 3.03,暂定为(2,3),根据当前分割轴维度(2.1 > 2),选取右支,而右支为空,回溯上一个节点。
- 计算(2.1,3.1)与(5,4)的分割轴{y = 4}的距离,如果0.14小于距离值,说明就是最近值。如果大于距离值,说明,还有可能存在值与(2.1,3.1)最近,需要往右支检索。
由于0.14 < 0.9,我们找到了最近邻的值为(2,3),最近距离为0.14。
- 多个最近邻
多个近邻其实和一个最近邻类似,不过是存储区间变为了多个,判定方法还是完全一样。
由于篇幅的原因,这里就不在赘述。这篇博客讲的很详细,有兴趣的同学可以去学习一下:
加载中www.joinquant.com3、常用函数
kd-tree在日常使用中,一般会在两个方面使用:
- 最近邻搜索
- 距离范围搜索
距离范围搜索的原理和最近邻搜索的差不多,把满足距离的全部放进去就可以了。
最近邻搜索的函数在激光点云匹配中找最近点的时候用的比较多:
//头文件
其中,当k为1的时候,就是最近邻搜索。当k大于1的时候,就是多个最近邻搜索。
距离范围搜索:
//在点云中寻找和点searchPoint满足radius距离的点和距离,返回下标pointIdxRadiusSearch和距离pointRadiusSquaredDistance
其完整的使用代码可以参考PCL的官方文件
#include 4、参考文献
[1] https://en.wikipedia.org/wiki/K-d_tree
[2] https://www.cnblogs.com/maxlpy/p/4297254.html
[3] http://pointclouds.org/documentation/tutorials/kdtree_search.php















 4504
4504











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









