





原标题:可卷起放口袋机器人!全软皮肤结构用于机器人运动和运输
导读
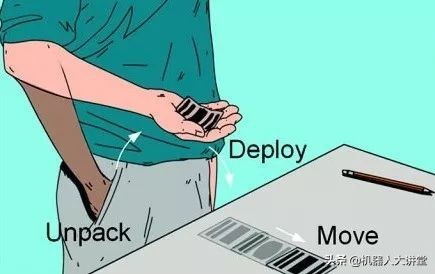
今天介绍一款造型别致的软体机器人。布里斯托大学的研究人员发现了一种将人造肌肉和电粘附力嵌入软材料中的新方法,他们创造了可拉伸的、类似皮肤的机器人,该机器人可以卷起来放在口袋里。这一进步可能会影响到创造用于环境监控、在危险环境中部署的新型轻薄型机器人,用于精密物体的机器人抓手以及新的可穿戴技术等。该团队将研究成果以一篇名为《All-Soft Skin-LikeStructures for Robotic Locomotion and Transportation》的论文发表在《Soft Robotics》杂志上。
作者:凛冬
这次布里斯托克大学的研究人员提出了高度变形、完全柔软的类似皮肤的概念,向我们展示了一种活性的、可拉伸的、便携的人造皮肤(ElectroSkin),它将介电弹性体致动器(DEAs)和软电粘接剂(EAs)结合在一个完全顺应的多层复合皮肤状结构中。
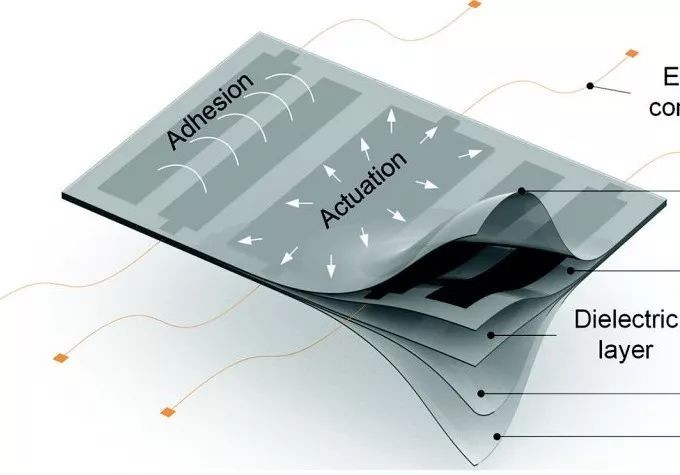
DEAs本质上是软的和可变的并联电容器,在电场作用下由于麦克斯韦压力可以变形,从而产生显著的应力和应变。Soft EAs主要是可变共面电容器,可用于在应用中产生可控的附着力电压阳离子。电粘接是利用电场在EA装置与被粘物体之间产生电控制的粘接力。DEA和EA均具有低能耗特性。
整个ElectroSkin整体化、轻巧、无噪音、柔软且能耗低、易于制造且可放入口袋,可以帮助将来的软机器人开发自驱动、自握和自定位功能。

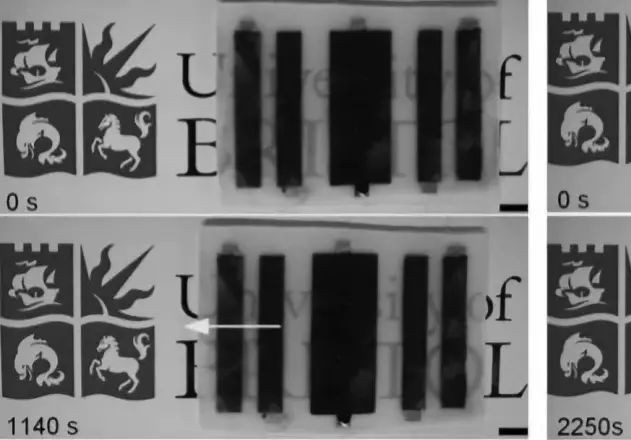
ElectroSkins可以是使用全软弹性体和易于获得的导电材料制成的。他们在第一条软自驱动传送带(传送速度为0.28 mm / s)和可装袋的全软履带机器人上展示了它们的功能。这种新型的、自我驱动、自我抓握和自我定位的柔软人造皮肤将很大可能会在功能性柔软智能复合材料、可展开机器人、柔软智能输送机以及合规抓握和操纵应用行业产生重大影响。
该ElectroSkin可以饱经蹂躏,将它扭绞在一起、卷起来,放进口袋中,然后又拿出来,其功能也完全不受影响。
ElectroSkin的嵌入式多模态提供了一种可变形的活动皮肤的新技术,可以抓住和移动物体并自动移动。研究人员说,但是直到这一发现,软机器人才能将其移动能力与抓握在其移动表面的能力区别开来。它还可以在桌子上移动,既可以自主移动也可以受人操控,下面是ElectroSkin在桌子上移动的小黄鸭。
在机器人技术、可穿戴技术和医疗保健方面,柔软的人造皮肤是关键的缺失成分。到目前为止,智能皮肤主要是被动的,任何机械动作都需要外部驱动,例如使用马达和肌腱。
ElectroSkin,一种拥有内在驱动能力的结构,除了实现智能皮肤和像传统机器人的结构并交付新的可穿戴技术之外,还可以配置为各种各样的轻型有源结构,可以制造完整的机器人,例如柔软的传送带和不同设计的便携式履带机器人。这些软智能复合设备证明了其有效性和这种活跃的人造皮肤可能会影响可部署和救援机器人和工业应用,例如便携式机械手、主动抓手和柔软的传送带等。
在原论文中,作者还仔细讲解了ElectroSkin的制作材料和步骤,以及ElectroSkin履带机器人的制造过程,如果感兴趣可以前往该网址下载论文。
本文版权属于机器人大讲堂
未经授权禁止转载
欢迎点赞分享转发到朋友圈返回搜狐,查看更多
责任编辑:















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









