





✒️ 角点检测(Corner Detection)是计算机视觉系统中用来获得图像特征的一种方法,广泛应用于运动检测、图像匹配、视频跟踪、三维建模和目标识别等领域中,也称为特征点检测。本文主要介绍了两种经典的检测方法,具体可以详读本文~
目录
- Harris角点检测
- 概述
- 函数
- 示例
- Shi-Tomas角点检测
- 概述
- 函数
- 示例
- 亚像素级的角点检测
- 概述
- 函数
- 代码
Harris角点检测
概述
✔️ Chris_Harris 和 Mike_Stephens 早在 1988 年的文章《A Combined Corner and Edge Detector》中就已经提出了焦点检测的方法被称为 Harris角点检测。他把这个简单的想法转换成了数学形式。将窗口向各个方向 移动(u , v)然后计算所有差异的总和。
表达式如下:

数学转换后:

其中:

I_{x}Ix和I_{y}Iy是图像在x和y方向的导数(可以用函数cv2.Sobel()计算得到).
最终,根据一个用来判定窗口内是否包含角点的等式进行打分:

其中:

函数
✔️ OpenCV 中的函数 cv2.cornerHarris() 可以用来进行角点检测,参数如下:
- img - 输入图像。
- blockSize - 角点检测中领域像素的大小。
- ksize - Sobel 求导中使用的窗口大小
- k - Harris 角点检测方程中的自由参数,取值参数为 [0,04,0.06].
- 输出 response
示例
import numpy as npimport cv2 as cvdef harris(image, opt=1): # Detector parameters blockSize = 2 apertureSize = 3 k = 0.04 # Detecting corners gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY) dst = cv.cornerHarris(gray, blockSize, apertureSize, k) # Normalizing dst_norm = np.empty(dst.shape, dtype=np.float32) cv.normalize(dst, dst_norm, alpha=0, beta=255, norm_type=cv.NORM_MINMAX) # Drawing a circle around corners for i in range(dst_norm.shape[0]): for j in range(dst_norm.shape[1]): if int(dst_norm[i, j]) > 120: cv.circle(image, (j, i), 2, (0, 255, 0), 2) # output return imagesrc = cv.imread("chessboard.jpg")cv.imshow("input", src)result = harris(src)cv.imshow('result', result)cv.imwrite('result.jpg', result)cv.waitKey(0)cv.destroyAllWindows()Shi-Tomas角点检测
概述
✔️ Shi-Tomas是源于《Good Features to Track》,其中对Harris角点检测算法改进后的新算法。
✔️ Shi-Tomas使用的打分函数为:
R=minleft(lambda_{1},lambda_{2}ight)R=min(λ1,λ2)
如果打分超过阈值,则认为它是一个角点,因此可以绘制如下所示的空间图:
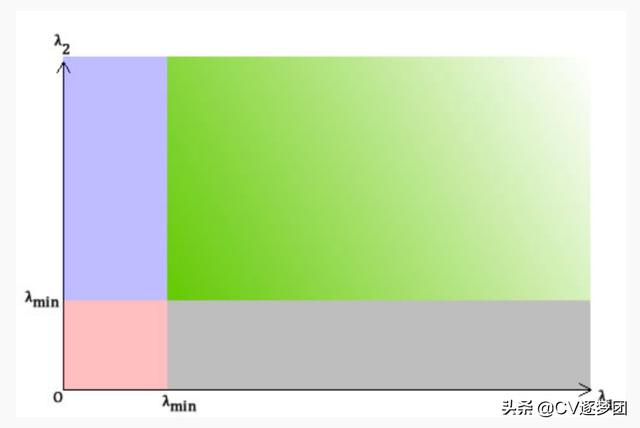
图中,只有当lambda_{1}λ1和lambda_{1}λ1都大于之最小值,才可以被认为是角点(绿色区域)
函数
✔️ OpenCV 中的函数 cv2.goodFeaturesToTrack() 可以用来进行角点检测,参数如下:
输入:
- src单通道输入图像,八位或者浮点数。
- maxCorners表示最大返回关键点数目。
- qualityLevel 角点品质因子:表示拒绝的关键点 R < qualityLevel × max response将会被直接丢弃。
- minDistance 表示两个关键点之间的最短距离。
- mask 表示mask区域,如果有表明只对mask区域做计算。
- blockSize 计算梯度与微分的窗口区域。
- useHarrisDetector 表示是否使用harris角点检测,默认是false 为shi-tomas。
- k = 0.04默认值,当useHarrisDetector为ture时候起作用。
输出:
- corners是输出的关键点坐标集合
示例
import numpy as npimport cv2def process(image, opt=1): # Detecting corners gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) corners = cv2.goodFeaturesToTrack(gray, 35, 0.05, 10) print(len(corners)) for pt in corners: print(pt) b = np.random.random_integers(0, 256) g = np.random.random_integers(0, 256) r = np.random.random_integers(0, 256) x = np.int32(pt[0][0]) y = np.int32(pt[0][1]) cv2.circle(image, (x, y), 5, (int(b), int(g), int(r)), 2) # output return imagesrc = cv2.imread("blox.jpg")cv2.imshow("input", src)result = process(src)cv2.imshow('result', result)cv2.imwrite('result.jpg',result)cv2.waitKey(0)cv2.destroyAllWindows()
image

result
亚像素级的角点检测
概述
✔️ OpenCV中角点检测的结果实际不够精准,因为真实的计算中有些位置可能是在浮点数的空间内才最大值,这样就需要我们通过给定的响应值,在像素邻域空间进行拟合,实现亚像素级别的角点检测。
函数:
cv2.cornerSubPix(InputArray image,InputOutputArray corners,Size winSize,Size zeroZone,TermCriteria criteria )- image单通道输入图像,八位或者浮点数。
- corners是输入输出的关键点坐标集合。
- winSize表示插值计算时候窗口大小。
- zeroZone表示搜索区域中间的dead。 region边长的一半,有时用于避免自相关矩阵的奇异性。如果值设为(-1,-1)则表示没有这个区域。
- criteria角点精准化迭代过程的终止条件。
代码:
import numpy as npimport cv2 as cvdef process(image, opt=1): # Detecting corners gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY) corners = cv.goodFeaturesToTrack(gray, 100, 0.05, 10) print(len(corners)) for pt in corners: print(pt) b = np.random.random_integers(0, 256) g = np.random.random_integers(0, 256) r = np.random.random_integers(0, 256) x = np.int32(pt[0][0]) y = np.int32(pt[0][1]) cv.circle(image, (x, y), 5, (int(b), int(g), int(r)), 2) # detect sub-pixel winSize = (3, 3) zeroZone = (-1, -1) # Stop condition criteria = (cv.TERM_CRITERIA_EPS + cv.TermCriteria_COUNT, 40, 0.001) # Calculate the refined corner locations corners = cv.cornerSubPix(gray, corners, winSize, zeroZone, criteria) # display for i in range(corners.shape[0]): print(" -- Refined Corner [", i, "] (", corners[i, 0, 0], ",", corners[i, 0, 1], ")") return imagesrc = cv.imread("tyt.png")cv.imshow("input", src)result = process(src)cv.imshow('result', result)cv.imwrite('result.jpg',result)cv.waitKey(0)cv.destroyAllWindows()
image

result
未完待续~
更多Opencv教程将持续发布!
欢迎关注哟~❤️❤️❤️















 7947
7947











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









