






 本文详细介绍了研华运动控制卡的轴设置属性,包括Alarm、Aux/Gen Output、Backlash、Basic Info、Cam DO、Comparator、DI Filter、ERC、EXT、HLMT、HOME、Home Speed、In Position、IN1(IN2/IN4/IN5)Stop、Jog、Latch、Pulse In、Pulse Out、Simulate Start、SLMT和Speed Pattern等多个方面。内容涵盖了轴的报警响应、通用输出、背隙补偿、基础信息、凸轮DO、位置比较、输入滤波、误差清除、外部信号、硬件限位、回原点、Jog运动、锁存、脉冲输入输出、同步起停和软限位等参数的设置和功能说明。
本文详细介绍了研华运动控制卡的轴设置属性,包括Alarm、Aux/Gen Output、Backlash、Basic Info、Cam DO、Comparator、DI Filter、ERC、EXT、HLMT、HOME、Home Speed、In Position、IN1(IN2/IN4/IN5)Stop、Jog、Latch、Pulse In、Pulse Out、Simulate Start、SLMT和Speed Pattern等多个方面。内容涵盖了轴的报警响应、通用输出、背隙补偿、基础信息、凸轮DO、位置比较、输入滤波、误差清除、外部信号、硬件限位、回原点、Jog运动、锁存、脉冲输入输出、同步起停和软限位等参数的设置和功能说明。
本文主要是对研华运动控制卡的轴设置属性参数进行概括说明,由于脉冲型运动控制卡和EtherCAT总线运动控制卡的轴设置属性共用,因此该说明适用于脉冲型和EtherCAT总线型运动控制卡。只是脉冲型运动控制卡支持设置的属性更多,而EtherCAT总线的设置会比较少,如PCI-1203有的轴设置属性是“NOT_SUPPORT”,则表示该属性不是在板卡端设置,可能需要在驱动器端设置。若是驱动器端和板卡端都不支持,则说明该属性不适用于EtherCAT总线运动控制卡。
打开研华运动控制卡的调试工具Advantech Common Motion Utility(简称UT),à“轴设置”按钮,可对轴属性进行配置,下文有对各个属性进行说明及各个轴属性的含义。
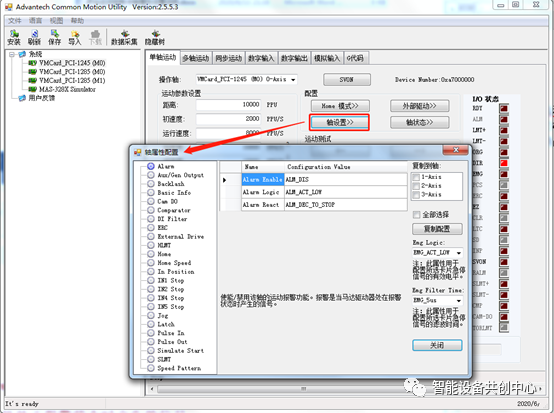
1. Alarm 常用设置
若电机驱动器上的报警信号线有接到研华运动控制卡的ALM针脚(EtherCAT电机驱动器不需要接,直接走EtherCAT总线读取),当驱动器报警时,研华板卡可以读取到驱动器的报警信号,并作出与设置一致的反映。
(1)Alarm Enable 启用/禁用该轴的电机驱动器报警反映功能
Alarm属性 |
编程调用 |
数据类型 |
Alarm Enable |
CFG_AxAlmEnable |
U32 |
ALM_DIS |
0(禁用)默认状态 |
|
ALM_EN |
1(启用) |
(2)Alarm Logic 设置电机驱动器报警信号的有效逻辑电平
Alarm属性 |
编程调用 |
数据类型 |
Alarm Logic |
CFG_AxAlmLogic |
U32 |
ALM_ACT_LOW |
0(低电平) |
|
ALM_ACT_HIGH |
1(高电平)默认状态 |
(3)Alarm React 设置电机驱动器报警时轴的停止模式
Alarm属性 |
编程调用 |
数据类型 |
Alarm React |
CFG_AxAlmReact |
U32 |
ALM_IMMED_STOP |
0(立即停止) |
|
ALM_DEC_TO_STOP |
1(减速停止)默认状态 |
2. Aux/Gen Output
(1)AuxOut Enable 启用/禁用轴群中的该轴在AddPathDwell()期间的Aux-Output功能
Aux/Gen Output属性 |
编程调用 |
数据类型 |
AuxOut Enable |
该功能已经不再使用 |
U32 |
(2)AuxOut Time 设置轴群中该轴在AddPathDwell()期间的Aux-Output信号的输出时间时间
Aux/Gen Output属性 |
编程调用 |
数据类型 |
AuxOut Time |
该功能不再使用 |
U32 |
(3)GenDo Enable 启用/禁用该轴的DO作为通用DO功能。建议直接设置启用,若是该轴某个DO要用作特殊用途,比如OUT5要做位置比较输出端口,此时只要把位置比较功能启用,则OUT5就默认是作为位置比较输出端口,而不能再作为普通DO使用。若OUT5要做普通DO使用,只需要把该轴的位置比较输出功能禁用就可以。
Aux/Gen Output属性 |
编程调用 |
数据类型 |
GenDo Enable |
CFG_AxGenDoEnable |
U32 |
GEN_DO_DIS |
0(禁用) |
|
GEN_DO_EN |
1(启用)默认状态 |
3. Backlash
轴的背隙补偿相关参数设置
(1)Backlash Enable 启用/禁用该轴的背隙补偿功能
Backlash属性 |
编程调用 |
数据类型 |
Backlash Enable |
CFG_AxBacklashEnable |
U32 |
BKSH_DIS |
0(禁用)默认状态 |
|
BKSH_EN |
1(启用) |
(2)Backlash Pulses 当启用该轴的背隙补偿功能时,设置需要补偿背隙的脉冲值。当该轴的运动方向发生变化时,该轴在发命令前会先输出背隙补偿脉冲值。
Backlash属性 |
编程调用 |
数据类型 |
Backlash Pulses |
CFG_AxBacklashPulses |
U32 |
范围0~4095 |
0~4095(单位脉冲,默认10) |
(3)Backlash Velocity 当启用该轴的背隙补偿功能时,设置输出补偿脉冲的速度(Pulse/s)。
Backlash属性 |
编程调用 |
数据类型 |
Backlash Velocity |
CFG_AxBacklashVel |
U32 |
范围0~5000000 |
0~5000000(脉冲/s,默认1000) |
4. Basic Info 常用设置
轴相关的基础参数设置或者读取
(1)PhyID 获取该轴的物理ID(只读)
Basic Info属性 |
编程调用 |
数据类型 |
PhyID |
CFG_AxPhyID |
U32 |
值范围0~63 |
范围0~63(只读) |
(2)PPU 设置该轴的PPU分子范围
Basic Info属性 |
编程调用 |
数据类型 |
PPU |
CFG_AxPPU |
U32 |
范围大于0整型值 |
>0(默认1) |
(3)PPU Denominator 设置该轴的PPU分母范围
Basic Info属性 |
编程调用 |
数据类型 |
PPU Denominator |
CFG_AxPPUDenominator |
U32 |
范围>0整型值 |
>0(默认1) |
注:PPU是研华运动控制卡的虚拟单位
比如电机转1圈需要10000个脉冲,轴移动10mm,这时也就是相当于1000个脉冲对应1mm,即可设置PPU=1000,PPU Denominator=1,此时则1个PPU对应1mm,这时候PPU就可以理解成mm;
再比如电机转一圈需要36000脉冲,电机转一圈是360°,也就相当于100个脉冲对应1°,因此可以设置PPU=100,PPU Denominator=1,则1个PPU对应1°,这时候PPU就可以理解成°。
当单位转化不能整除时,比如电机转一圈需要10000个脉冲,轴移动了9mm,此时10000/9个脉冲相当于1mm,由于PPU只能设置整数,没法写小数点,因此可以设置PPU=10000,PPU Denominator=9,来表示10000/9个脉冲是1个PPU,即PPU可以理解成mm单位。
(4)Module Range 当轴为旋转轴时,该值设置成旋转360°的脉冲个数。该值用于切向运动和凸轮运动中。可请参考Acm_AxTangentInGp、Acm_DevDownLoadCAMTable和Acm_AxCamInAx函数
Basic Info属性 |
编程调用 |
数据类型 |
Module Range |
CFG_AxBacklashPulses |
U32 |
范围0~8000000 |
0~8000000(4的倍数,默认0) |
(3)Max Error Count 设置该轴的理论位置和反馈位置差值的最大值,0表示不限制。当理论位置和反馈位置的差值超过设置的值,则轴会报错ErrorStop。
Basic Info属性 |
编程调用 |
数据类型 |
Max Error Count |
CFG_AxMaxErrCount |
U32 |
≥0整型值 |
≥0(整型,默认0) |
5. Cam DO
设置凸轮位置区间触发功能的相关参数,当启用CamDO时,当轴的理论位置/反馈位置处于低限位和高限位之间时,将触发CamDO输出开/关的信号
(1)CamDO Enable 启用/禁用该轴的凸轮位置区间触发功能。当该功能启用时,则该轴的OUT4只能用来做CamDO输出,不能作为普通DO使用;当该功能禁用时,则该轴的OUT4可做普通DO使用。
Cam DO属性 |
编程调用 |
数据类型 |
CamDO Enable |
CFG_AxCamDOEnable |
U32 |
CAM_DO_DIS |
0(禁用)默认状态 |
|
CAM_DO_EN |
1(启用) |
(2)CamDO Logic 设置该轴凸轮位置区间触发功能的DO输出信号的有效逻辑电平
Cam DO属性 |
编程调用 |
数据类型 |
CamDO Logic |
CFG_AxCamDOLogic |
U32 |
CAM_DO_LOW |
0(低准位) |
|
CAM_DO_HIGH |
1(高准位)默认状态 |
(3)CamDO Compare Source 设置CamDO功能的比较数据源,可依据理论位置也可依据反馈位置来做CamDO功能。
Cam DO属性 |
编程调用 |
数据类型 |
CamDO Compare Source |
CFG_AxCamDOCmpSrc |
U32 |
SRC_COMMAND_POSITION |
0 (理论位置)默认状态 |
|
SRC_ACTUAL_POSITION |
1 (实际位置) |
(4)CamDO Mode 设置CamDO的信号输出模式,目前不支持模式设置,只能是默认模式,即当轴位置处于凸轮位置区间时,则CamDO输出;不在凸轮位置区间,则CamDO不输出。
Cam DO属性 |
编程调用 |
数据类型 |
CamDO Mode |
该功能不再使用 |
U32 |
(5)CamDO Direction 设置CamDO的触发方向,目前不支持设置,即只要轴的位置处在凸轮位置区间,CamDO就会输出,不论当前轴是往大于方向运动还是往小于方向运动。
Cam DO属性 |
编程调用 |
数据类型 |
CamDO Direction |
该功能不再使用 |
U32 |
(6)CamDO Low Limit 设置/获取凸轮位置区间的低限位。
Cam DO属性 |
编程调用 |
数据类型 |
CamDO Low Limit |
CFG_AxCamDOLoLimit | U32 |
10000 |
-2147483647~2147483647 |
(7)CamDO High Limit 设置/获取凸轮位置区间的高限位。
Cam DO属性 |
编程调用 |
数据类型 |
CamDO High Limit |
CFG_AxCamDOHiLimit |
U32 |
20000 |
-2147483647~2147483647 |
6. Comparator
设置位置比较触发功能的相关参数,轴在运动过程中,当经过设定的比较位置方向与设定位置比较触发方向一致时,CMP DO会输出对应的触发信号
(1)Compare Enable 启用/禁用该轴的比较触发功能。当该功能启用时,则该轴的OUT5只能用来做CMP DO输出,不能作为普通DO使用;当该功能禁用时,则该轴的OUT5可做普通DO使用。
Comparator 属性 |
编程调用 |
数据类型 |
Compare Enable |
CFG_AxCmpEnable |
U32 |
CMP_DIS |
0(禁用)默认状态 |
|
CMP_EN |
1(启用) |
(2) Compare Source 设置/获取该轴的位置比较触发信号源
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 230
230











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









