






前文中只是理论方面的推导,虽然也有例子,但都是2杆连接的,而且是平面运动的,对于一些刚入门的小伙伴来说可能不太明白,因此,我打算拿出一章的内容来举例说明,对象是工业六轴机器人(型号为MOTOMAN-MH12)。推导公式使用的软件为mathmatica,编程方面主要使用matlab,是数学分析三大软件(Matlab、Maple、Mathematica)中的两个,如果以后想要做研究的话,还是需要了解一下的。
1、机器人运动学(正逆)推导
该机器人的设计尺寸为

由上图可以将该型号的机器人的模型设计为如下模型,

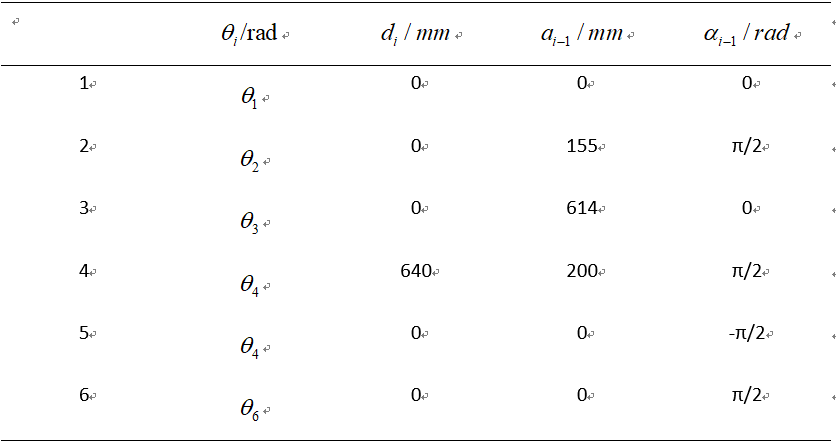
则该机器人的DH(这里用是M-DH建模方法)参数为,
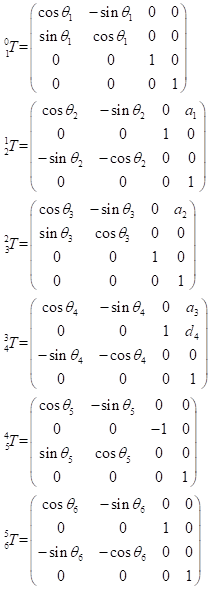
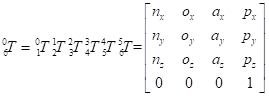
该型号的工业机器人的正向运动学模型为,
关于运动学逆解方面,我这里会有解析解与迭代解两种方法来举例。但是知乎这个平台更大的作用是介绍与总结,不适合放代码,也为了不拖慢在知乎上文章更新的速度,因此具体的推导以及算法实现过程我会放在github上,想要的小伙伴可以点击以下连接。
Mryehua/Myrobotgithub.com我会不定期的更新程序(可能一周一更,也可能两周一更)。
欢迎各位小伙伴观看、评论与分享。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









