





01
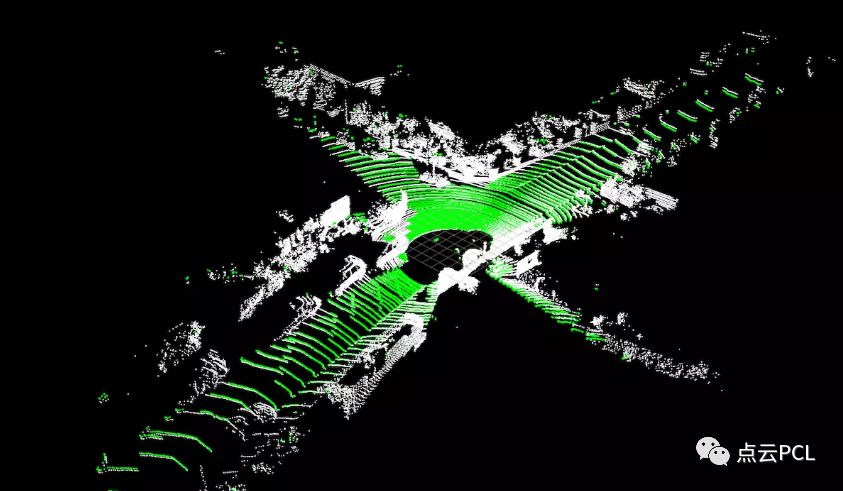
激光雷达点云的平面提取与路面分割
Fast Segmentation of 3D Point Clouds: A Paradigm on LiDAR Data for Autonomous Vehicle Applications
code:https://github.com/VincentCheungM/Run_based_segmentation
Time-series LIDAR Data Superimposition for Autonomous Driving
Fast segmentation of 3D point clouds for ground vehicles
An Improved RANSAC for 3D Point Cloud Plane Segmentation Based on Normal Distribution Transformation Cells
Segmentation of Dynamic Objects from Laser Data
A Fast Ground Segmentation Method for 3D Point Cloud
Ground Estimation and Point Cloud Segmentation using SpatioTemporal Conditional Random Field
Real-Time Road Segmentation Using LiDAR Data Processing on an FPGA
Efficient Online Segmentation for Sparse 3D Laser Scans
该文章可查看公众号文章 实时稀疏点云分割
CNN for Very Fast Ground Segmentation in Velodyne LiDAR Data
A Comparative Study of Segmentation and Classification Methods for 3D Point Clouds
Fast Multi-pass 3D Point Segmentation Based on a Structured Mesh Graph for Ground Vehicles
Circular Convolutional Neural Networks for Panoramic Images and Laser Data
Python bindings for Point Cloud Library
code:https://github.com/strawlab/python-pcl
02
点云配准与定位
Point Clouds Registration with Probabilistic Data Association
code:https://github.com/ethz-asl/robust_point_cloud_registration
Robust LIDAR Localization using Multiresolution Gaussian Mixture Maps for Autonomous Driving
Automatic Merging of Lidar Point-Clouds Using Data from Low-Cost GPS/IMU Systems
3DFeat-Net: Weakly Supervised Local 3D Features for Point Cloud Registration
Incremental Segment-Based Localization in 3D Point Clouds

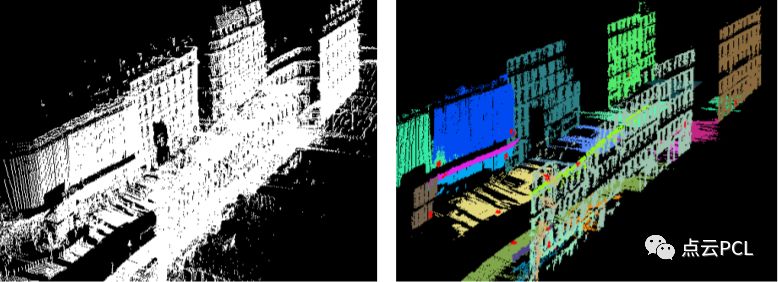
03
点云特征提取
Fast Feature Detection and Stochastic Parameter Estimation of Road Shape using Multiple LIDAR
Finding Planes in LiDAR Point Clouds for Real-Time Registration
Online detection of planes in 2D lidar
A Fast RANSAC–Based Registration Algorithm for Accurate Localization in Unknown Environments using LIDAR Measurements
Hierarchical Plane Extraction (HPE): An Efficient Method For Extraction Of Planes From Large Pointcloud Datasets
A Fast and Accurate Plane Detection Algorithm for Large Noisy Point Clouds Using Filtered Normals and Voxel Growing
04
点云物体检测与跟踪
Learning a Real-Time 3D Point Cloud Obstacle Discriminator via Bootstrapping
Terrain-Adaptive Obstacle Detection
3D Object Detection from Roadside Data Using Laser Scanners
3D Multiobject Tracking for Autonomous Driving : Masters thesis A S Abdul Rahman
Motion-based Detection and Tracking in 3D LiDAR Scans
Lidar-histogram for fast road and obstacle detection
End-to-end Learning of Multi-sensor 3D Tracking by Detection
Leveraging Heteroscedastic Aleatoric Uncertainties for Robust Real-Time LiDAR 3D Object Detection
Deep tracking in the wild: End-to-end tracking using recurrent neural networks
Leveraging Heteroscedastic Aleatoric Uncertainties for Robust Real-Time LiDAR 3D Object Detection
Deep Multi-modal Object Detection and Semantic Segmentation for Autonomous Driving: Datasets, Methods, and Challenges
Low resolution lidar-based multi-object tracking for driving applications

05
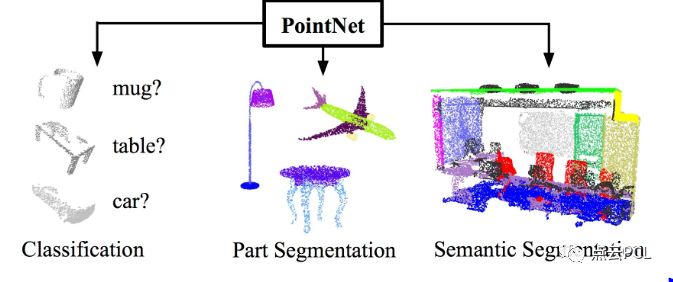
点云分类与监督学习
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation
website:http://stanford.edu/~rqi/pointnet2/
SqueezeSeg: Convolutional Neural Nets with Recurrent CRF for Real-Time Road-Object Segmentation from 3D LiDAR Point Cloud
Improving LiDAR Point Cloud Classification using Intensities and Multiple Echoes
DepthCN: Vehicle Detection Using 3D-LIDAR and ConvNet
3D Object Localisation with Convolutional Neural Networks
SqueezeSegV2: Improved Model Structure and Unsupervised Domain Adaptation for Road-Object Segmentation from a LiDAR Point Cloud
PointSeg: Real-Time Semantic Segmentation Based on 3D LiDAR Point Cloud
Fast LIDAR-based Road Detection Using Fully Convolutional Neural Networks
ChipNet: Real-Time LiDAR Processing for Drivable Region Segmentation on an FPGA
06
点云与各类地图
Hierarchies of Octrees for Efficient 3D Mapping Adaptive Resolution Grid Mapping using Nd-Tree
LIDAR-Data Accumulation Strategy To Generate High Definition Maps For Autonomous Vehicles
Long-term 3D map maintenance in dynamic environments
Detection and Tracking of Moving Objects Using 2.5D Motion Grids
3D Lidar-based Static and Moving Obstacle Detection in Driving Environments: an approach based on voxels and multi-region ground planes
Spatio–Temporal Hilbert Maps for Continuous Occupancy Representation in Dynamic Environments
Dynamic Occupancy Grid Prediction for Urban Autonomous Driving: A Deep Learning Approach with Fully Automatic Labeling
Fast 3-D Urban Object Detection on Streaming Point Clouds
Mobile Laser Scanned Point-Clouds for Road Object Detection and Extraction: A Review
Efficient Continuous-time SLAM for 3D Lidar-based Online Mapping
DeLS-3D: Deep Localization and Segmentation with a 3D Semantic Map
Recurrent-OctoMap: Learning State-based Map Refinement for Long-Term Semantic Mapping with 3D-Lidar Data
HDNET: Exploiting HD Maps for 3D Object Detection

07
点云端到端学习
Monocular Fisheye Camera Depth Estimation Using Semi-supervised Sparse Velodyne Data
Fast and Furious: Real Time End-to-End 3D Detection, Tracking and Motion Forecasting with a Single Convolutional Net

08
点云其他类相关论文
DBSCAN algorithm:A density-based algorithm for discovering clusters in large spatial databases with noise
Hierarchical Density Estimates for Data Clustering, Visualization, and Outlier Detection
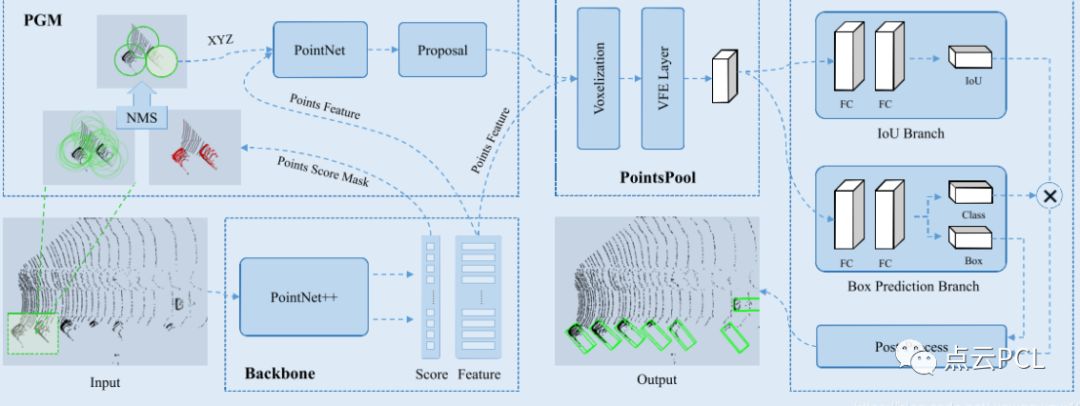
STD: Sparse-to-Dense 3D Object Detector for Point Cloud
Fast semantic segmentation of 3d point clounds with strongly varying density
The Perfect Match: 3D Point Cloud Matching with Smoothed Densities
09
点云数据集与模拟器
nuScenes : public large-scale dataset for autonomous driving
https://www.nuscenes.org/overview
Paris-Lille-3D: A Point Cloud Dataset for Urban Scene Segmentation and Classification
http://npm3d.fr/paris-lille-3d
Ford Campus Vision and Lidar Data Set
http://robots.engin.umich.edu/SoftwareData/Ford
Oxford RobotCar dataset 1 Year, 1000km: The Oxford RobotCar Dataset
https://robotcar-dataset.robots.ox.ac.uk/
Udacity based simulator
https://github.com/EvanWY/USelfDrivingSimulator
Tutorial on Gazebo to simulate raycasting from Velodyne lidar
http://gazebosim.org/tutorials?tut=guided_i1
Udacity Driving Dataset
https://github.com/udacity/self-driving-car/tree/master/datasets
Virtual KITTI
http://www.europe.naverlabs.com/Research/Computer-Vision/Proxy-Virtual-Worlds
KAIST Complex Urban Data Set Dataset
http://irap.kaist.ac.kr/dataset/download_1.html
Semantic KITTI
http://semantic-kitti.org/
希望有跑过以上开源代码的小伙伴能够积极评论与公众号取得联系,分享demo视频,并分享您的想法与更多志同道合的小伙伴一起交流和学习。
平台活动指南
公众号将会推送基于PCL库的点云处理,SLAM,三维视觉,高精地图相关的文章。公众号致力于理解三维世界相关内容的干货分享。不仅组织技术交流群,并且组建github组群,可自由分享。交流提问。
历史文章查看点云学习历史文章大汇总
1.一起学SLAM:第三期:一起来学SLAM
2.招募乐于分享的你:点云PCL运营招募啦
3.招募计算机视觉,SLAM,三维视觉,点云等相关领域博客博主,或者公司开设专栏,只要与平台主题相关,乐于分享,都可以与本平台合作经营,发布原创文章。并且可以加入微信,QQ交流群,认识更多志同道合的一起同行分享。
4,相机测评活动:图漾双目,小觅相机,奥比中光三款相机测评活动正在进行中,,,,,,
有意者均可联系邮箱:dianyunpcl@163.com,或者评论文章留言。
关于我们
目前微信交流群不断壮大,由于人数太多,目前有两个群,为了鼓励大家分享,我们希望大家能在学习的同时积极分享,将您的问题或者小总结和分享投稿发到群主邮箱dianyunpcl@163.com。
以上内容如有错误或者需要补充的,请留言!同时欢迎大家关注微信公众号,积极分享投稿,或者加入3D视觉微信群或QQ交流群。
原创不易,转载请联系群主,注明出处

排版:particle
供稿:群主
点一下“在看”你会更好看耶















 6万+
6万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









