






文章开始之前,先说点题外话,请问各位所在城市凉快了吗?
最近火炉四子正式出道,不知各位有何想法。笔者无语凝噎,火炉四子,其中三子居然都是笔者负责区域。
提到了气温,笔者作为仪器仪表销售首先想到的就是温度测量,谈到测量也就绕不开精度以及分辨率。
这时,笔者脑补了下列对话:
“你们公司的仪表测试精度怎么样啊,测量温度时候有多准啊?”
“您看,我们公司仪表精度很高的,我们分辨率可以到0.001℃呢,您看我测一下室温,目前是37.151℃”
“这么看来,你们公司仪表精度确实挺高的,武汉的天气也确实挺热啊”


Q1、分辨率高真的能代表精度高吗?
基本概念
精度:用来描述物理量的准确程度,其反应的是测量值与真实值之间的误差,
分辨率:是用来描述刻度划分的,其反应的是数值读取过程中所能读取的最小变化值
通过基本概念,我们就可以知道精度和分辨率有着很明显的区别,分辨率无法代表精度来评价仪器测量的准确性。工程师在仪表选型时,经常会被有些厂家套路,被高分辨率所吸引,忽略精度。
Q2、那么精度到底应该如何来表达?
笔者整理了下列资料:
f.s.=满量程(最大显示,标尺长度)
表示最大的显示(刻度)值或刻度长度(当刻度包含 不等增量单位或最大值无法定义时)。一般是现行 使用的量程值(写在量程选择钮上的数值,或相当 的数值)。但是,要特别注意,有时最大显示值是 2000V,但量程只有600V。最大显示值(标尺值)仍然 用f.s.值表示。
rdg=读数值(显示值,指示值)
表示实际测量出来的数据,也就是测试仪器现在的 指示值或显示值。
dgt=位数(分辨率)
表示数字测量仪器的最小显示单位,也就是数字显示屏最小位数为“1”时的数值。(原本以模拟/数字转换中的尾数处理为基础显示±1dgt.的误差, 但是实际是加上将误差换算为dgt.值后的dgt.误差。可通过相对于测量值的误差限值可通过记载入参数 的此类数值来求出。)
一般在精度编注时,为组合精度rdg.+f.s.或者rdg.+dgt.
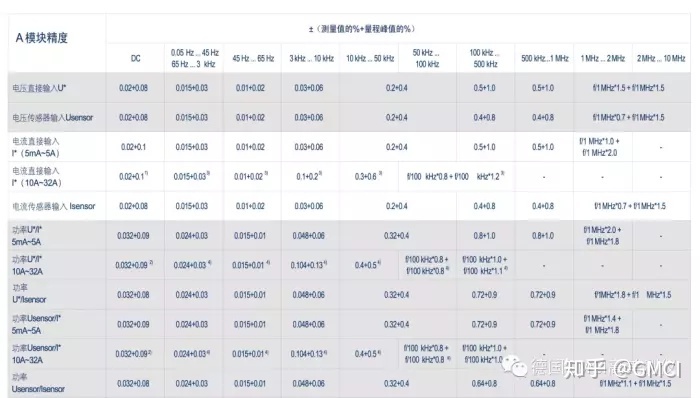
德国GMC-I高美测仪作为一家历史悠久的德国仪器仪表公司,为客户提供了广泛的测量仪表,只为工程师更好的进行测试。

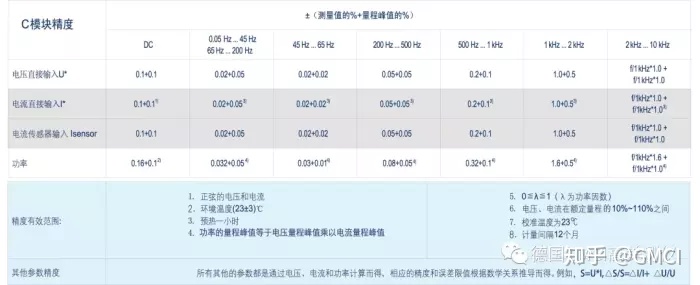
为了满足客户对精度的不同要求,我公司功率分析仪分为A/B/C三种模块,各项参数如下:
















 1242
1242











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









