






坐标变换:利用世界坐标系旋转、平移矩阵,将 3D点 从世界坐标系变换到相机坐标系中. 即:通过算法完成世界坐标系(3D)、2D landmark输入image、相机坐标系之间的映射转换和标定.
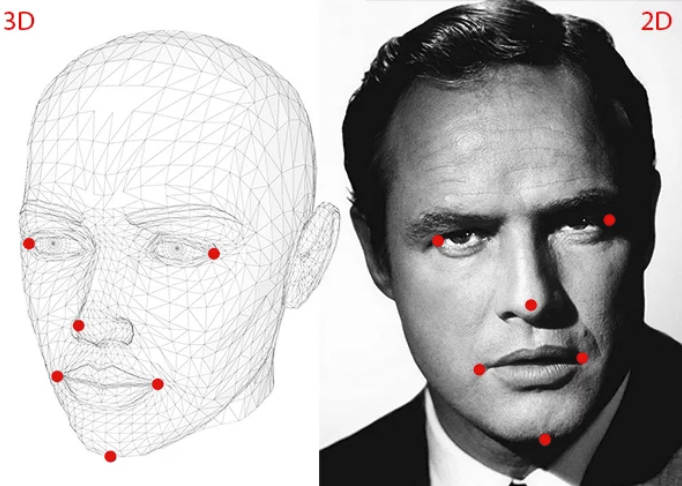
2D人脸特征点与3D世界坐标系的对应点
1. 计算旋转矩阵和平移矩阵
[基于OpenCV和Dlib的头部姿态估计[译] - AIUAI](
2. 旋转矩阵转换为欧拉角
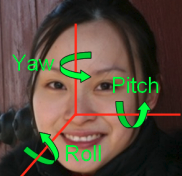
Yaw:摇头 左正右负
Pitch:点头 上负下正
Roll:摆头(歪头)左负 右正
 // C++
// C++
static cv::Vec3d RotationMatrix2Euler(const cv::Matx33d& rotation_matrix)
{
double q0 = sqrt(1 + rotation_matrix(0, 0) + rotation_matrix(1, 1) + rotation_matrix(2, 2)) / 2.0;
double q1 = (rotation_matrix(2, 1) - rotation_matrix(1, 2)) / (4.0*q0);
double q2 = (rotation_matrix(0, 2) - rotation_matrix(2, 0)) / (4.0*q0);
double q3 = (rotation_matrix(1, 0) - rotation_matrix(0, 1)) / (4.0*q0);
double t1 = 2.0 * (q0*q2 + q1*q3);
double yaw = asin(2.0 * (q0*q2 + q1*q3));
double pitch = atan2(2.0 * (q0*q1 - q2*q3), q0*q0 - q1*q1 - q2*q2 + q3*q3);
double roll = atan2(2.0 * (q0*q3 - q1*q2), q0*q0 + q1*q1 - q2*q2 - q3*q3);
return cv::Vec3d(pitch, yaw, roll);
}% matlab
function [euler] = Rot2Euler(R)
q0 = sqrt( 1 + R(1,1) + R(2,2) + R(3,3) ) / 2;
q1 = (R(3,2) - R(2,3)) / (4*q0) ;
q2 = (R(1,3) - R(3,1)) / (4*q0) ;
q3 = (R(2,1) - R(1,2)) / (4*q0) ;
yaw = asin(2*(q0*q2 + q1*q3));
pitch= atan2(2*(q0*q1-q2*q3), q0*q0-q1*q1-q2*q2+q3*q3);
roll = atan2(2*(q0*q3-q1*q2), q0*q0+q1*q1-q2*q2-q3*q3);
euler = [pitch, yaw, roll];
Python 实现:# Python
class PnpHeadPoseEstimator:
"""
基于 OpenCV PnP 算法实现的头部姿态估计.
It finds Roll, Pitch and Yaw of the head given a figure as input.
It uses the PnP algorithm and it requires the dlib library
"""
def __init__(self, cam_w, cam_h, dlib_shape_predictor_file_path):
"""
@param c
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 410
410











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









