





相信各位从事汽车电子行业的老司机们都用CANoe做过总线测试分析的工作,但是大家有没有想过利用CANoe直接控制虚拟仿真车辆的运行并实时显示运行参数状态?今天我们要给大家介绍的就是CANoe与DYNA4的联合仿真应用,即在CANoe中控制DYNA4生成的车辆动力学仿真模型,在CANoe中狂飙一把极品飞车。OK,老司机要开车了,大家做好准备。

开始之前,先了解一下什么是DYNA4。
一、DYNA4简介
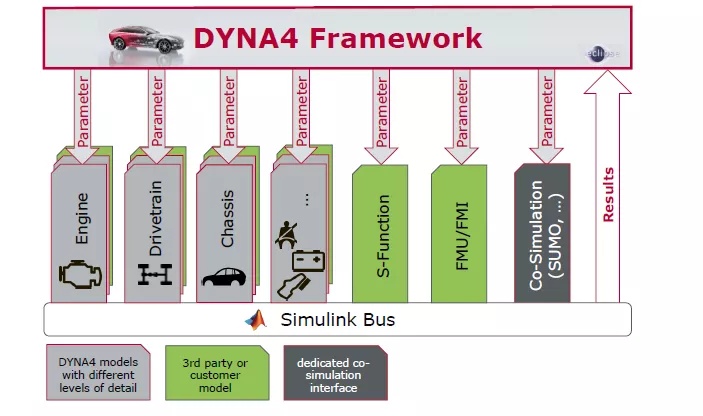
DYNA4是由德国TESIS公司(已被Vector全资收购)开发的一款模块化的虚拟驾驶仿真软件。软件提供了可清晰布局的用户界面,用于管理用户自定义模型以及TESIS自带模型。用户只需在TESIS提供的仿真模型上集成自定义或第三方功能模块,就可通过整车模型仿真快速验证算法的正确性。
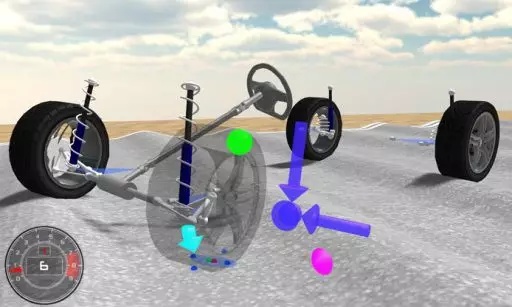
软件中不仅可以添加轮胎、发动机、底盘、能量管理等功能模块,还可添加车身周围环境,如交通车辆、行人、动物、道路标识等动静态物体,也可改变外部天气环境(雨、雪、雾),并可以通过DYNA animation三维动画软件,实时显示车辆驾驶环境。
DYNA4可应用于虚拟驾驶测试,主要优势如下:
- 在开发的早期阶段即可通过仿真模型对ECU功能进行验证,缩短开发周期
- 模拟关键交通与碰撞场景,提高安全性
- 可自动执行测试用例,缩减时间和人力成本
- 完整的车辆动力学仿真模型(发动机,底盘,轮胎等)
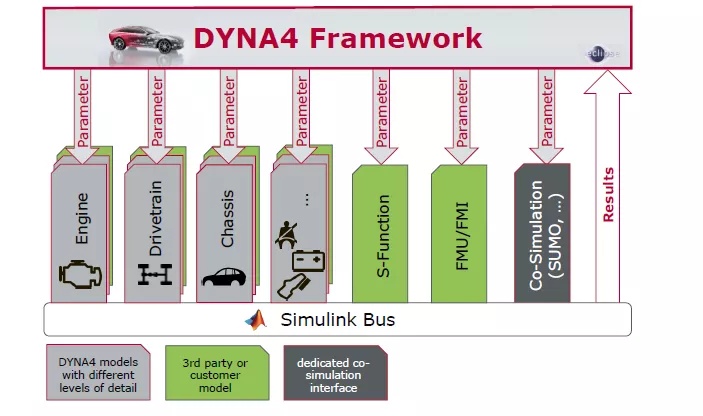
DYNA4应用场景
根据用户具体使用场景,DYAN4提供了不同的功能插件包,如下图所示:
1、DYNA4 Car Professional
提供车辆动力学开发与研究的仿真环境,主要包含以下功能:
- 多体底盘(Multi-body chassis)模型
- TMeasy与Pacejka的轮胎模型
- 用于分析轮胎模型,进行参数拟合的轮胎测试工程
- 制动压力分配与液压制动系统模型
- 通用传动系模型(手动自动换挡、前轮驱动、后轮驱动、4W驱动)
- 提供TCU、ECU(engine control units)、ABS仿真模型
- 三维道路定义,包括道路几何图形和路面特性
- 提供车辆开环控制与闭环控制方式
- 提供车辆动力学测试用例,如ISO测试、驾驶性能测试、转向步骤与回旋等标准测试。

2、DYNA4 Driver Assistance
驾驶员辅助系统中交通、传感器、道路、车道标识、被测车辆的模拟与可视化显示,主要包含以下功能:
- 可配置传感器模型,如雷达、摄像头等
- 提供ACC、AEB等模型
- 动态与静态物体组成的交通环境
- 动态交通环境可配置
- 提供标准的NCAP AEB与典型传感器功能测试用例


3、DYNA4 Commercial Vehicles
提供商用车开发与仿真环境,在DYNA4 Car Professional 功能基础上提供以下功能:
- 具备四轴双轮胎的汽车模型
- 拖车(Trailer)模型
- 各种挂接装置型号(转盘、半拖车、力元件)
- 提供卡车动力学测试用例(如ISO实验、驾驶性能实验、转向步骤与回旋等标准实验)


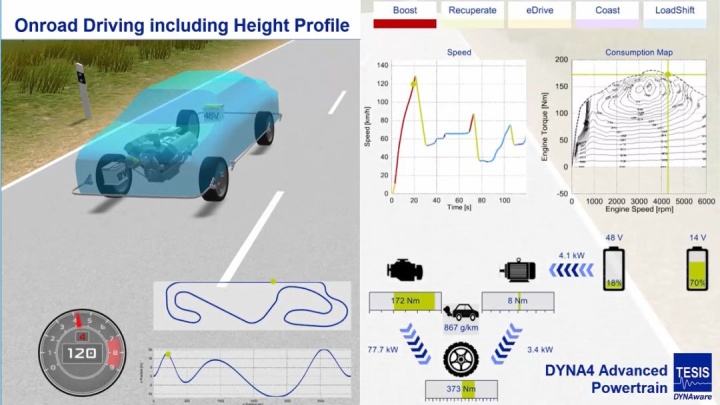
4、DYNA4 Advanced Powertrain
混动、电动、常规车辆仿真,主要用于驾驶性能分析、能耗分析、能源管理等领域,主要功能包括:
- 纵向动力学模型(质点底盘)
- 基于扭矩图的发动机模型
- 混动与电动汽车的HCU实施
- 典型的续航里程测试用例(如NEDC、FTP 75等)
5、DYNA4 Engine
采用均值模型方法对内燃机进行实时仿真,包含以下功能:
- 提供发动机模型库
- 柴油发动机模型包含自然吸气与涡轮增压
6、DYNA4 Framework
DYNA4软件环境,包括项目管理、仿真模型和模型数据管理、自动仿真、结果管理、报告和可视化功能等。提供以下模型功能:
- 纵向动力学模型
- 单轨模型,包括道路接触模型
- 扭矩图发动机
- 试验场道路模型
- 开环车辆控制
- 模型参数设置的向导和工具
- 一系列典型测试用例,巡航里程测试(驾驶循环)和驾驶性能测试。每个测试执行关联各自场景定义,并可添加预处理和后处理的附加功能。
DYNA4具备这么多强大的功能,当它遇上总线分析工具“老大”CANoe时,二者之间又会产生哪些有趣的“化学反应”呢?
二、DYNA4与CANoe联合仿真
DYNA4作为虚拟驾驶仿真环境,提供了丰富的车辆动力学仿真模型与功能库,但其无法与真实设备进行交互。然而,通过与CANoe联合仿真运行,利用CANoe并配合Vector硬件接口卡,可以实现DYAN4仿真模型与真实ECU进行数据交互。对于开发人员而言,可以通过外部ECU激励,测试仿真模型;或者通过仿真模型激励,测试真实ECU。
下面给大家介绍在CANoe工程中集成DYNA4模型的具体步骤。
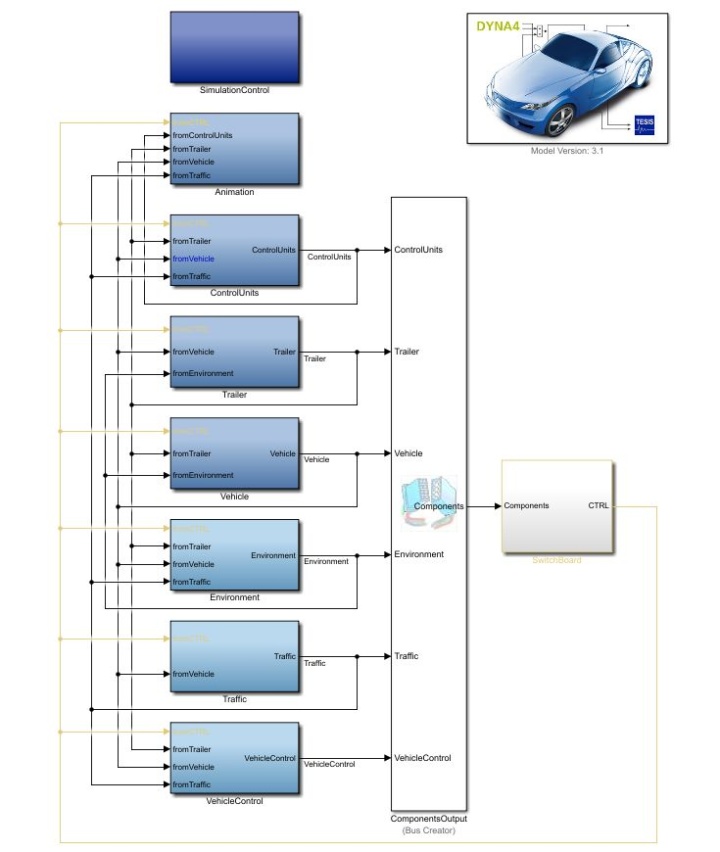
1、在DYNA4软件中新建整车动力学仿真模型并自动生成Simulink模型,如下图所示:
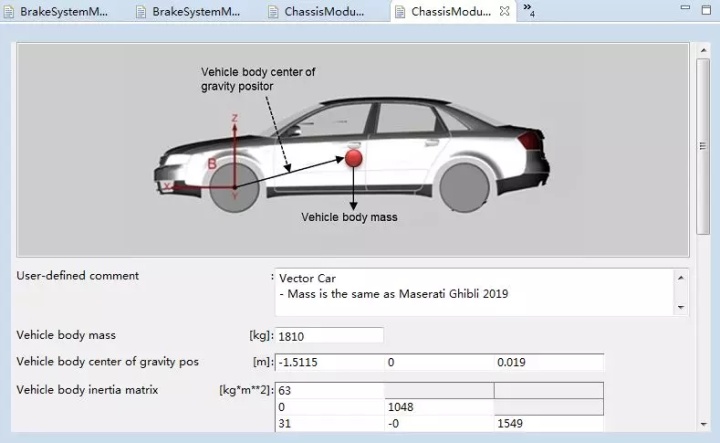
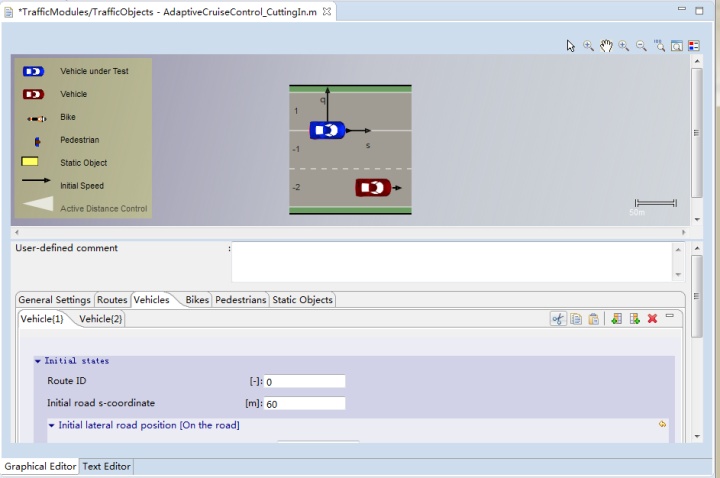
在DYNA4中设置车辆动力学参数,如下图所示:
在DYNA4中设置界面显示内容,如行人、车辆等,并设置交通参与者移动参数,如下图所示:
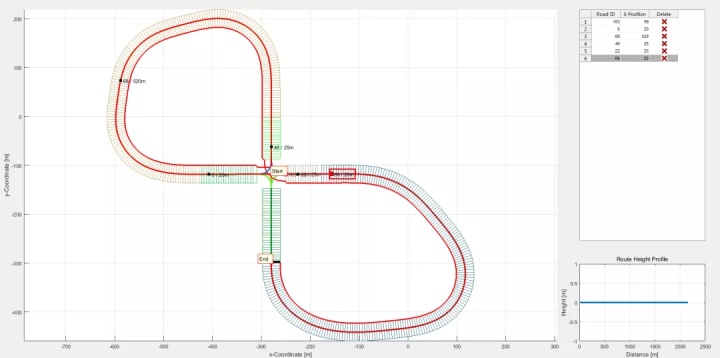
同时DYNA4支持OpenDRIVE格式编辑道路信息,如下图所示:
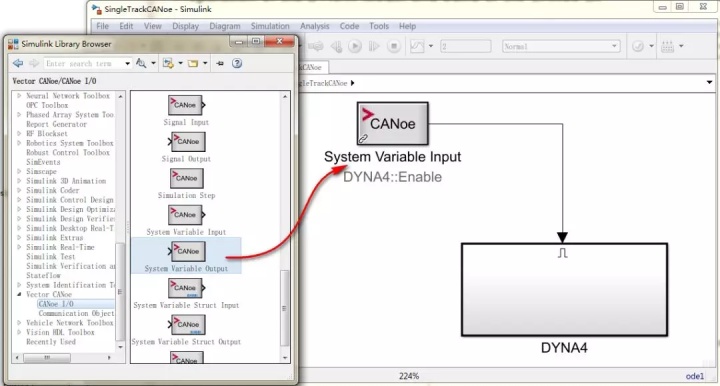
2、在生成的Simulink模型中添加CANoe的相关数据接口,如CANoe系统变量、CAN报文信号等,实现Simulink模型与CANoe的数据交互。(注:此处知识点可参考微信公众号“怿星科技”文章《CANoe与Matlab/Simulink联合仿真》)
3、Simulink模型修改完成后,在DYNA4中选择CANoe为目标仿真环境,编译模型即可生成CANoe使用的相关文件。
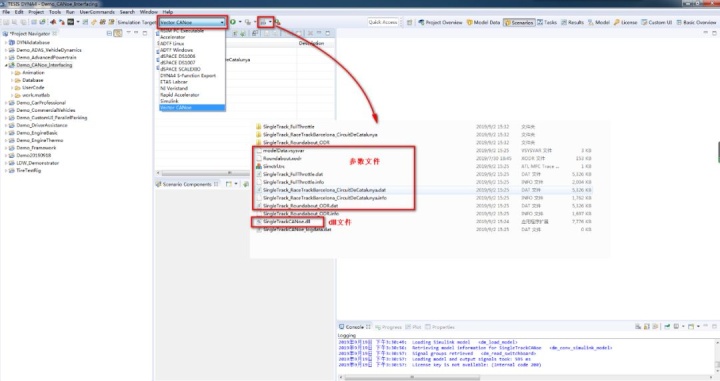
4、在CANoe工程中添加仿真节点,导入Simulink生成的.dll文件,并添加相关参数文件。
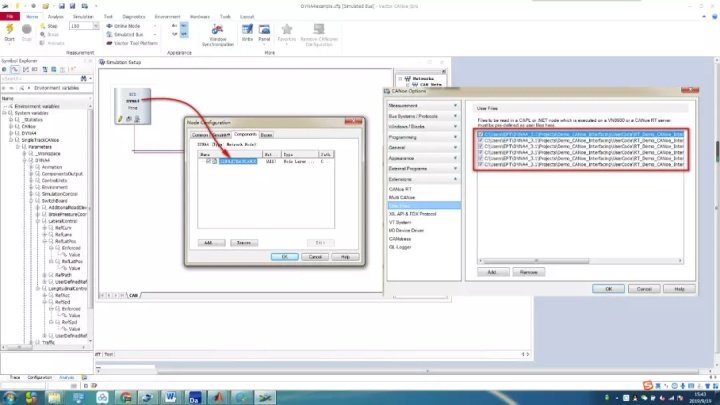
导入.dll文件后,DYNA4模型参数会映射为系统变量,如下图所示:
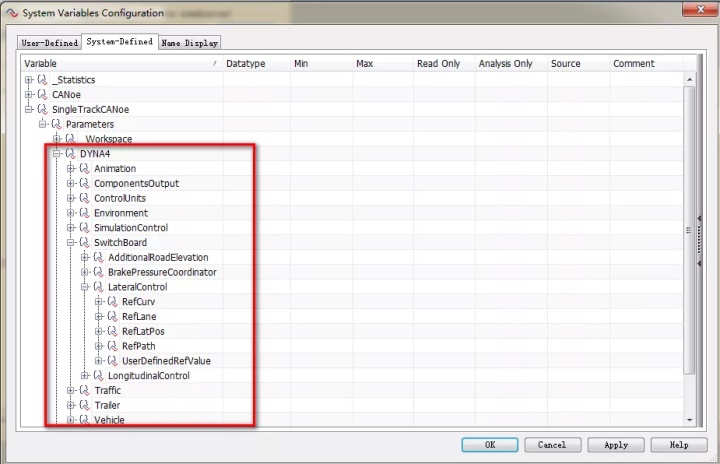
配置完成后,运行CANoe软件,通过修改系统变量来配置DYNA4模型参数;通过Vector硬件接口卡,实现仿真模型与真实ECU进行交互。
5、对于高实时性的仿真需求,可以将CANoe工程下载并运行在实时处理器中,如RT Rack、VT6051等,提高仿真效率。

以上就是CANoe与DYNA4的联合仿真步骤。DYNA4在车辆动力学仿真、ADAS HIL测试等领域有着广泛的应用场景。下面我们以LDW功能测试为例,介绍CANoe与DYNA4的具体应用场景。
三、应用案例分享—LDW功能测试
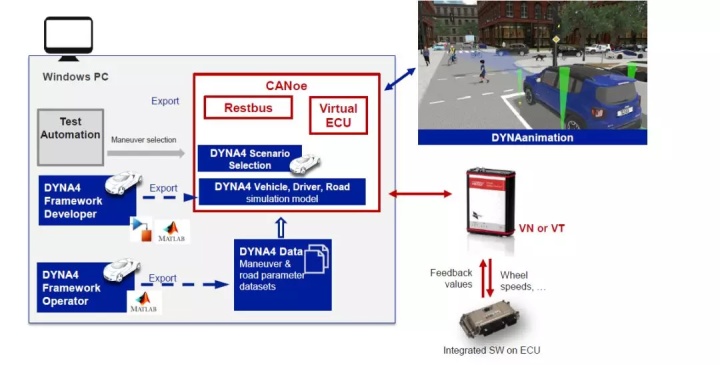
LDW车道偏离预警系统是一种通过报警的方式辅助驾驶员以避免因车道偏离而发生交通事故的ADAS辅助系统,下图为LDW功能测试架构图:
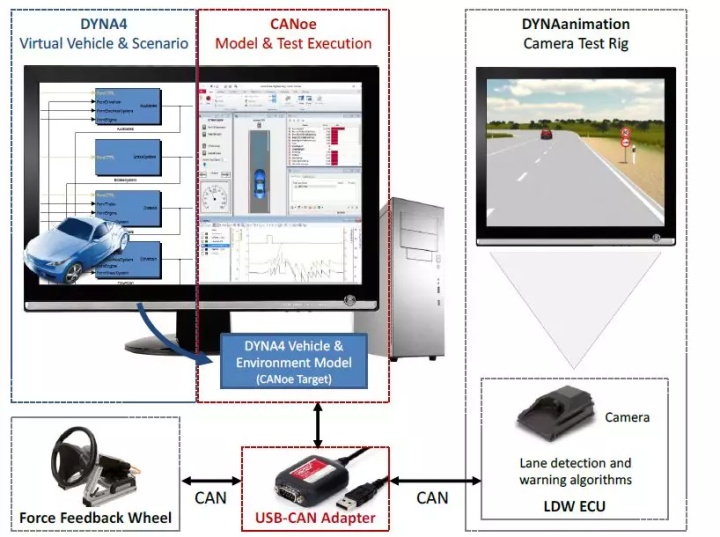
架构图中主要部件功能如下:
- DYNA4用于生成行驶的车辆模型,以及编辑动态场景
- CANoe提供运行环境,并通过Vector硬件接口卡与ECU进行总线信号交互
- DYNA animation通过动画显示测试场景以及车辆运行状态
- LDW ECU被测对象,放置在显示器前端,模拟摄像头在真实车辆中(比如前挡风玻璃)拍摄捕获DYNA4生成的虚拟动态路况;ECU进行图像处理后,通过CAN总线发送报警信息
- Wheel力反馈方向盘用于接收LDW发出的CAN总线信号,以振动形式反馈报警信息
测试实现流程如下:

Model configuration:在DYNA4中配置测试系统的车辆模型与环境模型;
Code generation:将模型编译生成.dll文件,导入CANoe中,作为仿真节点;
Parameterization:车辆参数、环境参数转变为CANoe系统变量,修改方便;
Automated test:CANoe中自动运行测试用例,通过vTestStudio管理测试用例;
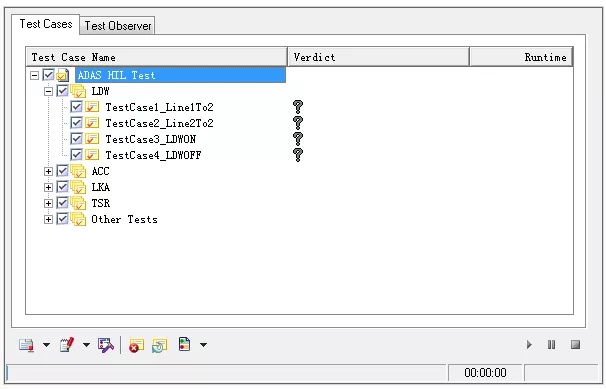
通过以上设置,即可实现LDW功能的自动化测试。
总结:针对基于CANoe&DYNA4的虚拟驾驶测试方案,重要知识点如下:
① 把DYNA4当成Simulink的二次开发应用,在DYNA4中编译生成Simulink DLL之后导入CANoe,两者通过系统变量进行数据交互,应用于ADAS HIL测试;
② DYNA4可以基于不同的目标平台生成目标文件,除了CANoe,还兼容dSPACE、ETAS、NI等第三方软硬件平台,接口非常灵活;
③ DYNA4支持OpenDRIVE标准,复杂路网的车道级建模,交通流仿真模拟,自然天气渲染和传感器仿真,可实现流畅的场景仿真效果。
今天的分享就到这里,各位小伙伴如对Vector工具有任何问题欢迎随时邮件咨询support@e-planet.cn。














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









