





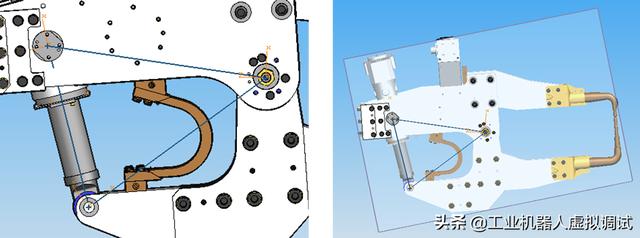
机器人X型焊枪运动机构较C型焊枪略为复杂,属于四连杆机构。如下图中红色线条组成的四个连杆,同时也形成了四个运动副,即三个旋转运动副和一个直线运动副,X型焊枪运动机构的创建就是基于这四个运动副来完成的。
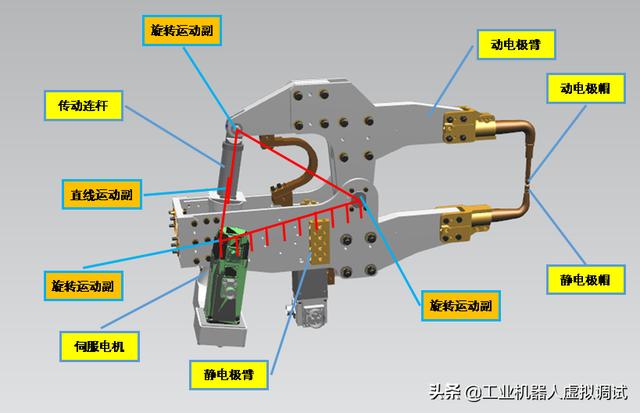
X型焊枪运动机构分析
1.打开Process Simulate软件,进入之前创建的Ex_Test1项目,进入项目后在软件工作区显示上一期中创建的机器人C型焊枪数模。
2.左侧Object Tree窗口中点击相应资源将软件工作区的机器人C型焊枪数模隐藏,点选机器人X型焊枪数模使其显示,并对其点选,然后在“Modeling”菜单栏下的“Set Modeling Scope”命令按钮,弹出Set Modeling Scope提示窗口,点击确定按钮。此时机器人X型焊枪数模变为可编辑状态,左侧Object Tree浏览树中的机器人X型焊枪SRTX-C0500-L上出现一个“M”标志。
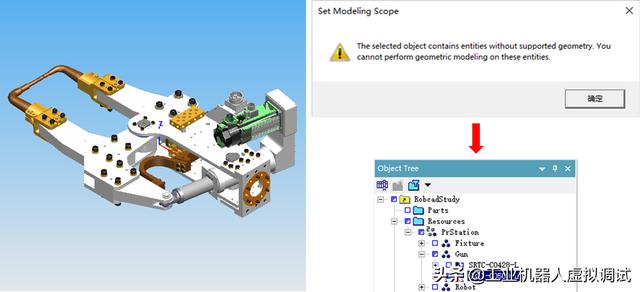
进入焊枪数模编辑状态操作
3.点击工具栏中的“Create Frame”命令按钮下的小三角,选择“Frame by circle center”,弹出Create Frame by Circle Center对话框。在机器人X型焊枪的伺服电机与静电极臂连接的旋转轴圆形部件边缘处依次点选3个点(间隔尽量大一些),Create Frame by Circle Center对话框中出现相应点的坐标值,同时圆形部件上出现坐标系fr1,点击OK按钮。
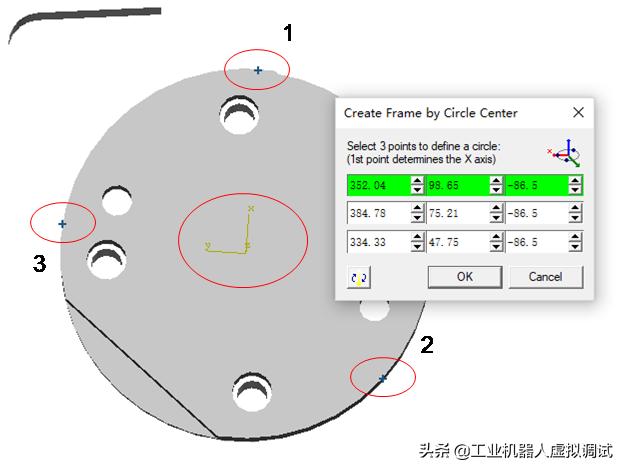
创建焊枪运动辅助坐标系fr1
4.重复步骤3在X型焊枪的其他旋转副旋转轴部件特征上分别创建运动辅助坐标系fr2、fr3。
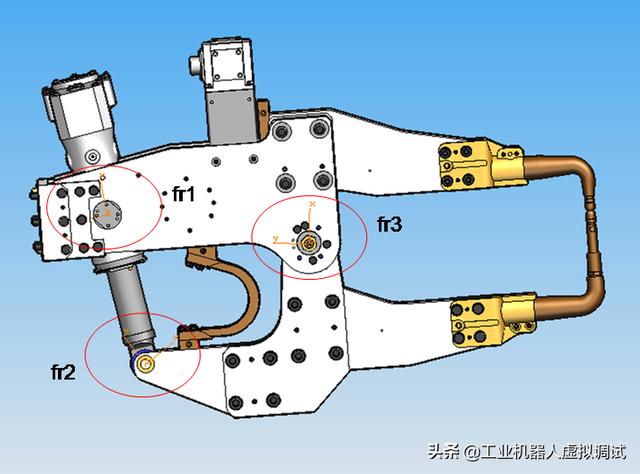
创建运动辅助坐标系fr2、fr3
5.直线运动副也需要创建2个运动辅助坐标系fr4、fr5,分别创建在传动连杆顶端圆形平面上与伺服电机与传动连杆连接处的圆形特征平面上(创建时可将有干扰的部件隐藏,以方便特征选取)。

创建运动辅助坐标系fr4、fr5
6.点击“Kinematics Editor”命令按钮,弹出Kinematics Editor对话框。点击上方的“Create Crank”命令按钮,弹出Create Crank对话框,点选RPRR运动形式,点击下一步按钮。弹出Select a joint from the diagram对话框,在软件工作区的焊枪数模上依次点选三个旋转运动副上创建的辅助坐标系fr1、fr2、fr3,相应旋转副特征参数区出现相应点的坐标值,同时软件工作区数模上,三个旋转副的运动辅助坐标系处出现一个三角形。点击Optional custom plane后的输入框使其变为绿色,然后点击数模上三个旋转运动副运动辅助坐标系中的任意一个,在此坐标系XY轴上形成辅助平面,点击下一步按钮。
X型焊枪运动机构制作一
7.在弹出的Prismatic Joint Offset对话框中,点击右侧的With offset,为X型焊枪运动机构创建偏移平面。左侧浏览树中分别点选为直线运动副创建的两个运动辅助坐标系,将数模以线框模式显示时软件工作区出现两条黄色虚线,点击下一步。
X型焊枪运动机构制作二
8.弹出Select a link frome the diagram对话框,这里将为焊枪选取运动关节。对话框的Select a link frome the diagram区域下分别点击四连杆机构图形中的Fixed Link、Input Link、Coupler Link、Output Link,并在软件工作区中分别点选焊枪的静电极臂、静电极帽、伺服电机、传动连杆、动电极臂、动电极帽,对话框的Link Elements下分别出现焊枪各部分点选的数模文件名称。运动关节选取完成后点击Finish按钮,Kinematics Editor对话框中出现与四连杆机构同名的运动关节以及相应运动关联结构图,同时软件工作区中焊枪数模以与Kinematics Editor对话框中的运功关节相同的颜色显示。
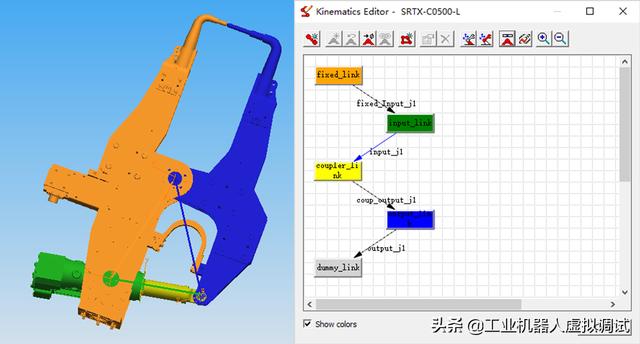
X型焊枪运动机构制作三
9.点击“Open Joint Jog”命令按钮,打开手动运动点焊焊枪对话框,拖动input_j1后的滚动条,可以看到焊枪随之做出相应的动作,点击下方的Reset按钮,焊枪恢复原始状态。
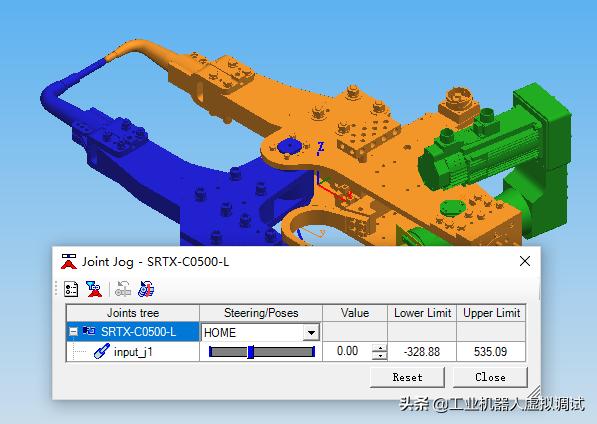
焊枪运动机构测试
10.在Kinematics Editor对话框中,双击蓝色input_j1箭头,弹出Joint Properties对话框,在此窗口为焊枪设置运动上下限。点击下方的“向下箭头”按钮,显示更多属性设置。在Limits type后选择Constant,分别输入动电极臂运动上限0、运动下限-148,点击OK按钮。
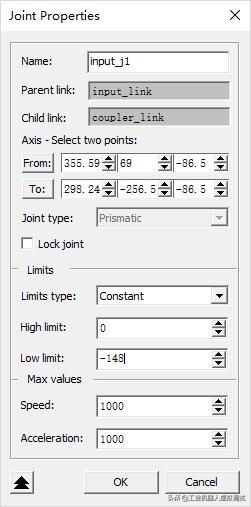
焊枪运动参数设置
11.点击“Open Pose Editor”命令按钮,弹出Pose Editor对话框,然后点击“New”命令按钮,弹出New Pose对话框,在Pose name后输入CLOSE,Value值输入0,点击OK按钮,为焊枪添加大开状态。
12.重复上述步骤,为机器人X型焊枪添加小开与关闭状态,Pose name分别为OPEN、SEM_OPEN,Value值分别输入-148、-25,创建完成后在Pose Editor对话框中选中任意一个运动姿态,点击“Jump”命令按钮,可以看到焊枪模型切换到对应的运动状态,点击Close按钮,完成焊枪运动状态添加。
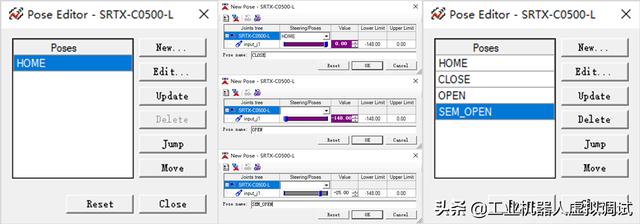
焊枪运动状态添加
13.参考上一期C型焊枪运动机构制作中的相关步骤,为X型焊枪创建Base参考坐标系与TCP坐标系。(Base坐标轴原点位于焊枪安装法兰中心处,Z轴指向Base内侧、X轴指向动电极臂方向;TCP坐标轴原点位于焊枪静电极帽顶端圆心处,Z轴指向动电极臂,X轴指向焊枪进给方向。)
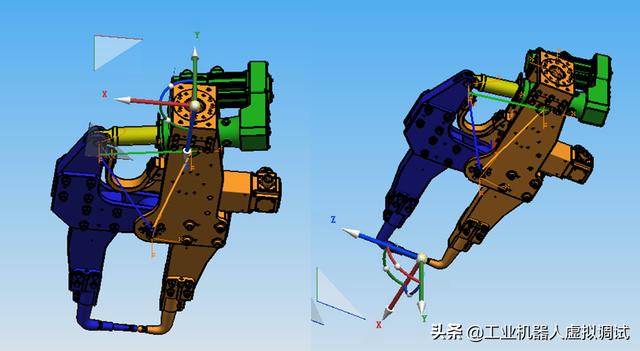
焊枪Base坐标与TCP坐标创建
14.参考上一期C型焊枪运动机构制作中的相关步骤,使用“Set Baseframe”命令按钮,为X型焊枪设置Base坐标;使用“Tool Definition”命令按钮定义焊枪。

设置焊枪Base坐标与定义焊枪
15.左侧Object Tree窗口中,分别点击创建的运动辅助坐标系以及各个运动副创建时生成的连接线使其隐藏。
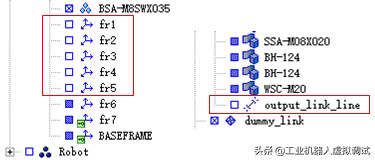
隐藏辅助坐标系与连接线
16.点击上方的“End Modeling”命令按钮,完成机器人X型焊枪运动机构创建并对其保存。点击上方的Home菜单,然后点击“Joint Jog”命令按钮,弹出Joint Jog对话框,点选Steering/Poses下的运动状态,焊枪运动状态随之改变。

焊枪仿真运行效果
17.点击上方的“Update eMServer”命令按钮,弹出eMServer Update对话框,保持默认,点击OK按钮,保存工作进度。
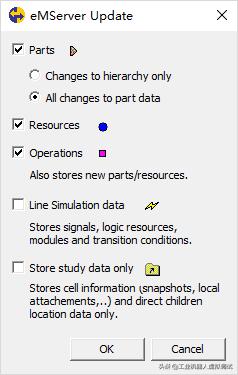
保存资源
The End
PDPS软件:机器人C型焊枪运动机构创建















 1992
1992











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









