







本文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎关注!
上一期为大家介绍了在Process Simulate虚拟仿真软件中机器人焊接操作工艺设置、焊接操作添加到路径编辑器、焊点姿态的调整;本期,再来为大家介绍一下机器人示教编程与工作站仿真运行。
一、机器人Home点示教
机器人Home点是机器人运行的起点,通常情况下它也是机器人运行的终点。
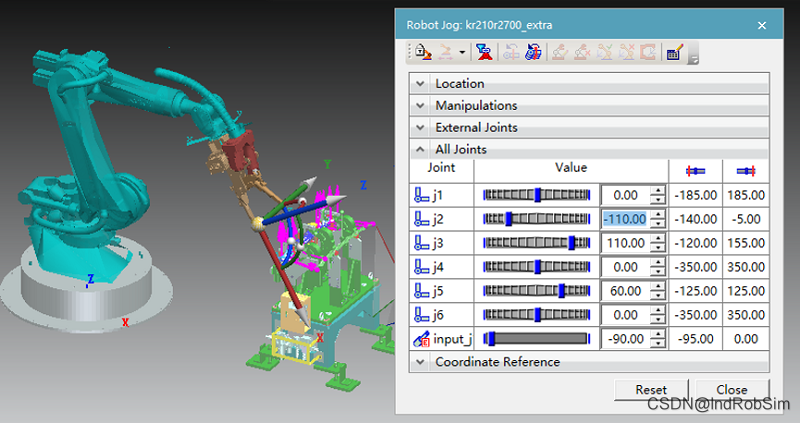
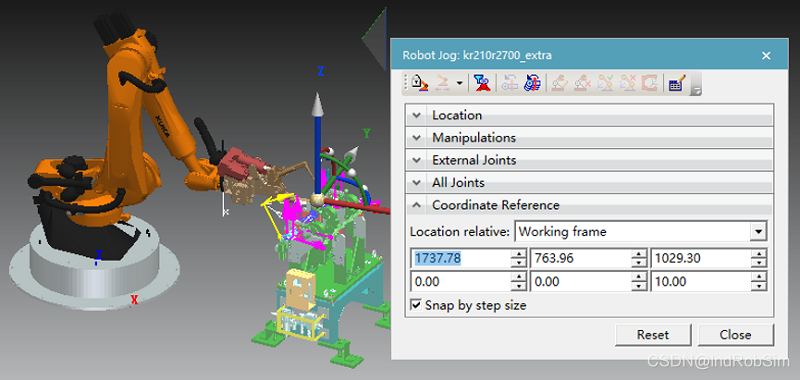
1.左侧对象树Object Tree窗口中,点选机器人kr210r2700_extra,然后在“Robot”菜单栏下,点击“Robot Jog” 命令按钮,在打开的机器人手动运行面板中,移动机器人到合适位置。
命令按钮,在打开的机器人手动运行面板中,移动机器人到合适位置。
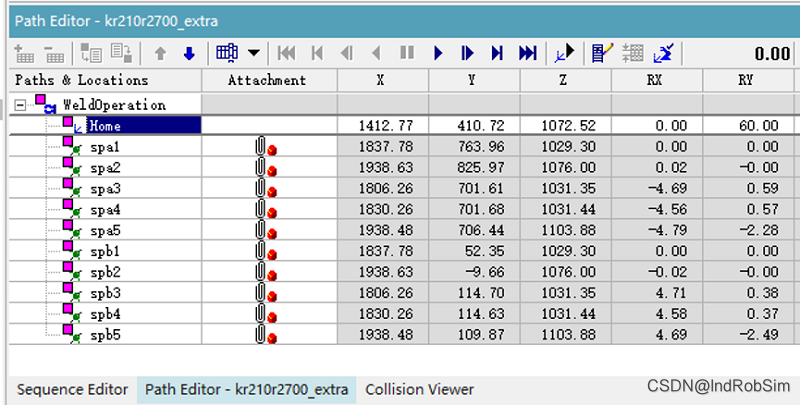
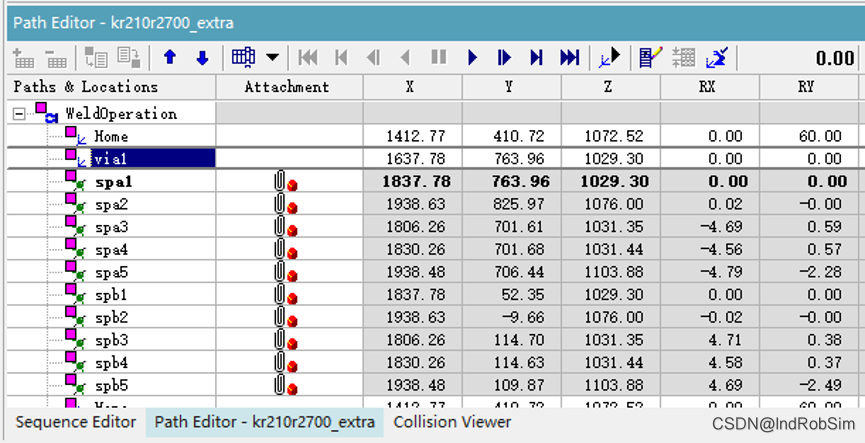
2.路径编辑器Path Editor窗口中点选机器人焊接操作WeldOperation,然后在“Operation”菜单栏下,点击“Add Current Location”  命令按钮,添加机器人当前位置作为示教点。
命令按钮,添加机器人当前位置作为示教点。
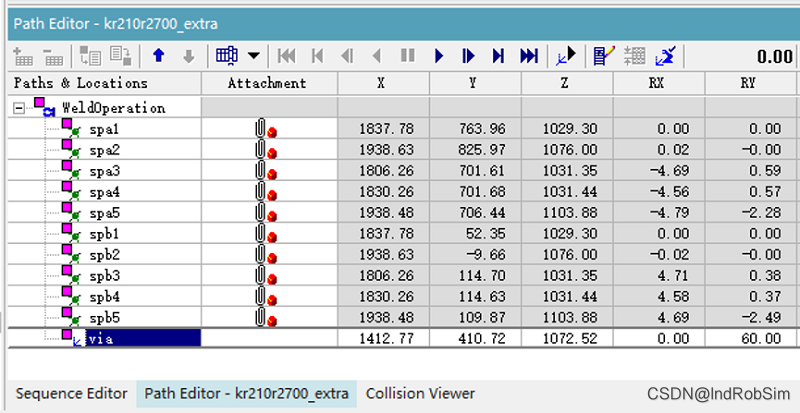
3.将添加的示教点重命名为“Home”,然后点击路径编辑器Path Editor窗口上方的“Move Up” ![]() 工具按钮,将Home点移动到最上方。
工具按钮,将Home点移动到最上方。
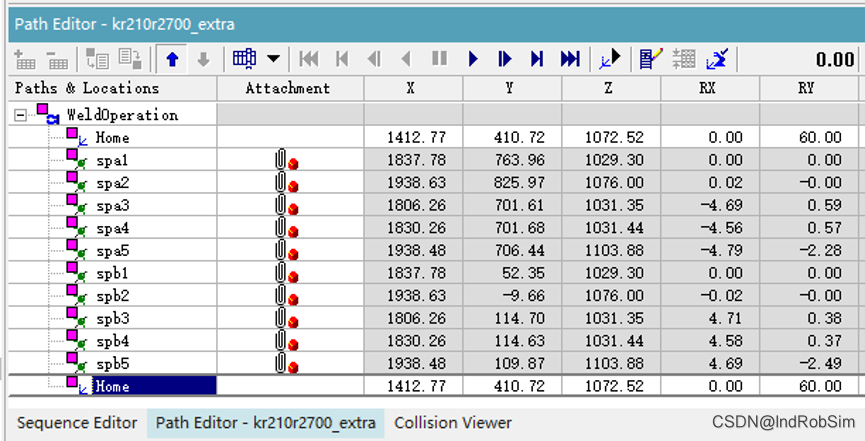
4.点选Home点程序,然后使用快捷键Ctrl+C将其复制,点选机器人焊接操作WeldOperation,使用快捷键Ctrl+V将其粘贴,可以看到粘贴的Home点程序自动创建在焊接程序的最后位置处,机器人Home点示教完成。
二、机器人过度点示教
机器人运行过度点是机器人在对工件加工时为了避过周边设备干涉或机器人怪异姿态而不可少的示教点。
1.路径编辑器Path Editor窗口中点选机器人加工工艺点spa1,“Robot”菜单栏下点击“Move to Location”  命令按钮,机器人自动移动到当前共加工工艺点位置处,然后使用使用运行机器人面板,移动机器人至合适位置处。
命令按钮,机器人自动移动到当前共加工工艺点位置处,然后使用使用运行机器人面板,移动机器人至合适位置处。
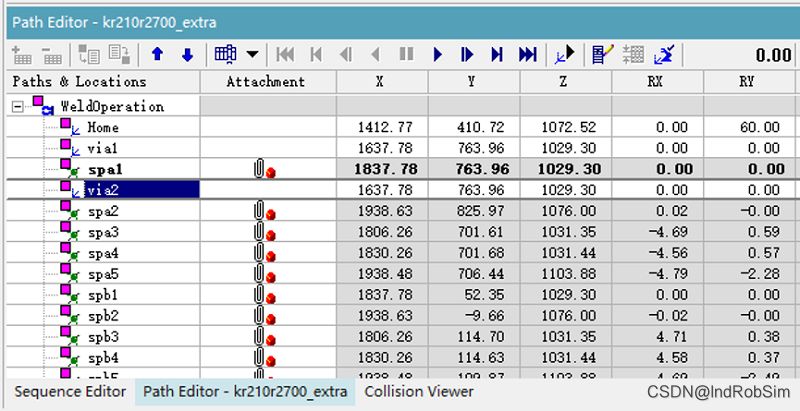
2.路径编辑器Path Editor窗口中点选机器人Home点,然后在“Operation”菜单栏下,点击“Add Current Location”命令按钮,将机器人当前位置作为示教点添加到加工工艺点spa1之前,并将其重命名为via1。
3.复制粘贴过度点via1,将其移动到加工工艺点spa1之后,并将其重命名为via2。当然,机器人过度点示教可不是只是简单的复制粘贴,需要观察机器人的姿态、周边设备等,由于这里只是教学演示,因此就不再详细介绍了。
4.重复上述步骤,为机器人添加剩余的运行过度点,过度点的添加要遵循以下几个原则:
- 精确性:精确性就是机器人在示教编程时,示教点位置要准确无误,同时要尽量避免怪异的姿态,尤其是运行路径中可能出现的奇异点。
- 可行性:可行性是机器人每一个示教点位置,在机器人运行过程中要尽量避免开与周边设备、加工工件的干涉。
- 高效性:高效性是在遵循上述两个原则的基础上,要尽量考虑加工工艺,保证工艺要求,符合运行节拍。
三、工作站仿真运行
1.示教编程完成后,在路径编辑器Path Editor窗口中点击“Play Simulation Forward” ![]() 按钮,启动机器人仿真运行,当然,也可以调整“Simulation Speed”滚动条,调整仿真运行速度。
按钮,启动机器人仿真运行,当然,也可以调整“Simulation Speed”滚动条,调整仿真运行速度。
2.仿真运行结束后,点击“Jump Simulation to Start”![]() 按钮,使机器人恢复原始状态,以便下一次仿真运行。
按钮,使机器人恢复原始状态,以便下一次仿真运行。
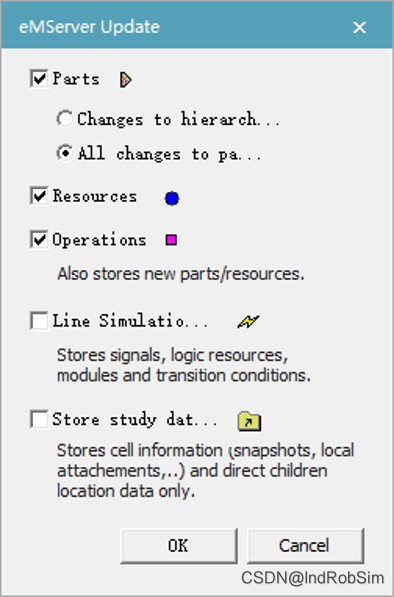
3.仿真运行无误后,点击上方的“Update eMServer” 按钮,在弹出的对话框中点选“All changes to pa…”,然后点击OK按钮,保存仿真工作站项目进度。
The End


















 2250
2250

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











