






引言
这篇文档主要介绍 RT-Thread 如何使用串口或者无线和 ROS 连接,会包含这么些内容:第一部分:ROS 环境搭建
第二部分:RT-Thread rosserial 软件包
第二部分:RT-Thread 添加 USART2 和 PWM
第三部分:RT-Thread 使用 ESP8266 AT 固件联网
这里先介绍一下什么是 ROS?为什么要和 ROS 连接?
机器人操作系统 ROS (Robots Operating System) 最早是斯坦福大学的一个软件框架,现在不管是工业机器人,还是娱乐用的机器人都运行着 ROS。
图片来源网络,如有侵权请联系删除
一个机器人通常有很多个部件、传感器,为了保证机器人不会因为某一个传感器故障,导致整个系统瘫痪,所以采用了分布式的节点,利用不同节点之间的通讯收集传感器数据和控制指令,这篇文档后面会使用到的通讯协议就是 rosserial。 和 ROS 连接的好处在于,一方面由 ROS 管理各个机器人节点更稳定,另一方面 ROS 现在已经有了非常多成熟的软件包,使用 ROS 就可以非常方便的为自己的机器人添加摄像头图像识别、激光雷达建图导航等高级功能。 不过这篇文档只会涉及 RT-Thread 和 ROS 建立基本的连接,实现小车的运动控制,之后可能会有后续文档介绍如何连接激光雷达建图,并进行全局路径规划。这篇文章假定大家都已经会用 RT-Thread 的 env 工具下载软件包,生成项目上传固件到 stm32 上,并且熟悉 Ubuntu 的基本使用。
1 ROS 简介
这里的开发环境搭建其实是需要搭建 2 份,一份是小车上的 ARM 开发板 (树莓派,NanoPi 什么的),另一个则是自己的电脑,因为我们希望把电脑作为 ROS 从节点,连接到小车上的 ROS 主节点,不过开发板和电脑的 ROS 安装是一模一样的。
既然要和 ROS 连接,那么首先就得要有一个正常运行的 ROS。安装 ROS 其实非常简单,这里推荐使用 Ubuntu 18 (开发板推荐系统用 Armbian),因为官方对 Ubuntu 的支持优先级是最高的,安装教程也可以参照 官网: http://wiki.ros.org/melodic/Installation/Ubuntu 只需要输入下面的 4 行命令,就在 Ubuntu 上装好了 ROS。1sudo sh -c 1.2 ROS 环境初始化
ROS 安装好之后还需要进行初始化,不过也是只有短短几行命令:1sudo rosdep init1roscore在 tmux 里启动了 ROS 主节点后,我们就可以 Ctrl + B D 退出了,而 ROS 主节点依旧在后台运行。
1.4 参考文献
- Armbian:https://www.armbian.com/
- ROS Melodic 安装:http://wiki.ros.org/melodic/Installation/Ubuntu
2 RT-Thread 串口连接 ROS
这一部分会介绍如何使用串口将运行着 RT-Thread 的 STM32 开发板和运行着 ROS 的 ARM 开发板连接,看起来差不多就是这样。
2.1 RT-Thread 配置
首先我们需要打开 usart2,因为 usart1 被 msh 使用了,保留作为调试还是挺方便的。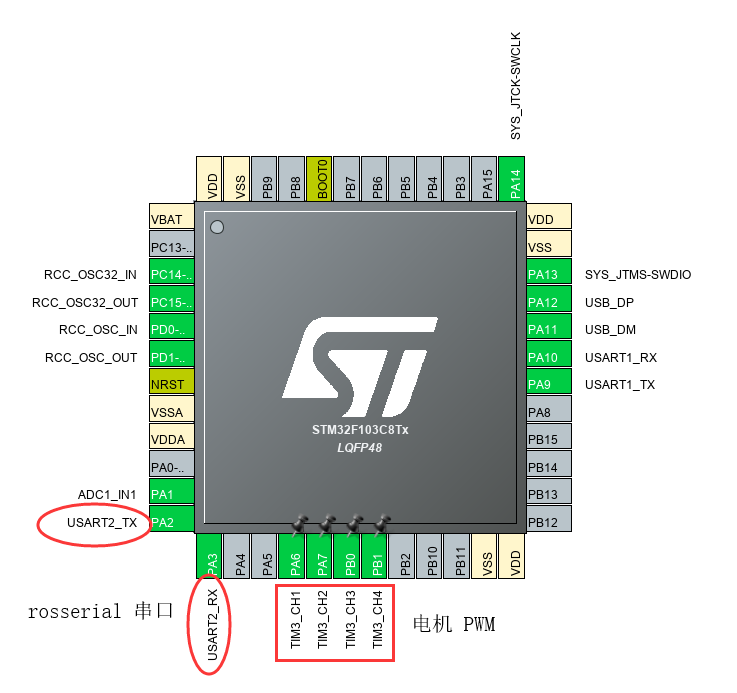 在 CubeMX 里我打开了 USART2,另外还打开了 4 路 PWM,因为我后面使用了 2 个电机,每个电机需要 2 路 PWM 分别控制前进和后退。
接下来还需要在 menuconfig 里面打开对应的选项,考虑到有的开发板默认的 bsp 可能没有这些选项,可以修改 board/Kconfig 添加下面的内容。
串口的配置:
在 CubeMX 里我打开了 USART2,另外还打开了 4 路 PWM,因为我后面使用了 2 个电机,每个电机需要 2 路 PWM 分别控制前进和后退。
接下来还需要在 menuconfig 里面打开对应的选项,考虑到有的开发板默认的 bsp 可能没有这些选项,可以修改 board/Kconfig 添加下面的内容。
串口的配置:
1menuconfig BSP_USING_UART 1menuconfig BSP_USING_PWM这样我们在 env 下就可以看到有对应的配置了,



可以看到上面默认的串口就是 USART2,这样我们就可以生成对应的工程了:
1pkgs --update
1另外还有对应的电机控制的代码,不过这个大家的小车不同,驱动应当也不一样,我这里由于小车电机上没有编码器,所以全部是开环控制的。
motors.h 1 12.2 ROS 配置
我们把上面 RT-Thread 的固件传到板子上以后,可以用一个 USB-TTL 一边和 STM32 控制板的 USART2 连接,另一边插到 ARM 控制板的 USB 口,接下来就可以建立连接了,在 ARM 板上输入命令:1$ rosrun rosserial_python serial_node.py /dev/ttyUSB01tpl@nanopineoplus2:~$ rosrun rosserial_python serial_node.py /dev/ttyUSB02.3 ROS 控制小车
既然已经成功建立连接了,下一步就是写小车控制的代码了。 我们先初始化一个工作区间:1$ mkdir catkin_workspace && cd catkin_workspace1$ cd src 1#!/usr/bin/python1$ chmod u+x ./ros_cmd_vel_pub.py这样就可以编译软件包了,在 catkin_worspace 目录下。
1$ catkin_make1rosrun my_first_pkg ros_cmd_vel_pub.py2.4 参考文献
- ros-pibot:https://github.com/wuhanstudio/ros-pibot
3 RT-Thread 无线连接 ROS
3.1 rosserial 配置
其实无线连接和有线连接几乎是一模一样的,只不过是先用 ESP8266 使自己的控制板能连上网,然后用 tcp 连接和 ROS 通信,关于 RT-Thread 使用 ESP8266 上网的教程可以参照 官网: https://www.rt-thread.org/document/site/application-note/components/at/an0014-at-client/ ,非常详细了,我这里就不重复了。 确保开发板有网络连接后,我们就可以在 rosserial 里面配置为使用 tcp 连接:
我们只需要在上一部分的 main.cpp 里添加一行代码:
13.2 ROS 配置
由于我们使用了 tcp 连接,所以 ROS 上自然也要开启一个服务器了,之前是使用的串口建立连接,现在就是使用 tcp 了:1$ rosrun rosserial_python serial_node.py tcp其他的代码完全不需要改变,这样我们就实现了一个 ROS 无线控制的小车了。
3.3 参考文献
RT-Thread 使用 ESP8266 上网:
https://www.rt-thread.org/document/site/application-note/components/at/an0014-at-client/
4 总结
这里再总结一下,其实 RT-Thread 使用 rosserial 软件包和 ROS 建立连接非常简单,只需要在自己小车原有代码的基础上发布一些消息,告诉 ROS 小车当前的状态,以及订阅来自 ROS 的控制指令就可以了。
1.2020年第5期《单片机与嵌入式系统应用》电子刊新鲜出炉!
2.为什么星链和5G是互补共荣,互相不能替代的两个大项目?
3.嵌入式系统:大数据和行业应用之间的桥梁
4.ARM的免费IP战略,能否撼动RISC-V的根基?
5.解读工信部25号文:蜂窝网包打物联网,LoRa真要凉凉了?
6.说说两个冷门却又不冷门的预处理指令#pragma和#error!
免责声明:本文系网络转载,版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将根据您提供的版权证明材料确认版权并支付稿酬或者删除内容。















 2862
2862











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









