






↑ 点击上方「中国测绘学会」
可快速关注我们
摘要:
随着移动终端的性价比逐渐提高,以及无线网络技术的快速发展,移动位置服务技术水平近几年也有了快速的提高,应用也越来越广泛。同样,移动用户对移动定位的精度要求也越来越高,为此,如何正确运用各种移动定位方式并提高移动定位的精度是移动位置服务面临的重要问题。重点分析了GPS移动定位和基于移动网络定位两种定位方式及其定位精度,为移动位置服务的应用发展提供参考。
关键词 :GPS;移动网络;移动定位;定位精度
引言全球定位系统技术(GPS)和无线通信网络技术是移动定位系统关键的两个要素。目前,移动定位主要有GPS终端移动定位和基于移动网络定位的两种定位方式。GPS终端移动定位有两种途径:第一种是终端独立定位的GPS途径,它是在终端设备内部加装GPS接收机模块,并将设备天线换成能够同时接收GPS信号的多用途天线。终端接收GPS数据,确定移动台的位置信息并将结果报给移动网络,第二种是联合定位途径,其典型代表是辅助全球卫星定位系统A-GPS(Assistant Global Positioning System)定位技术。AGPS与GPS方式一样需要在终端内增加GPS接收机模块并改造终端天线,但AGPS终端通过接收移动网络由GPS参考网络所产生的辅助数据可快速启动并捕获卫星。基于移动网络的定位计算,都在服务器端的定位平台完成,根据计算方式的不同,又可以分为小区定位CO0(Cell of Origin)、到达角定位AOA(Arrival of Angle)、抵达时间定位TOA(Time of Arrival)、抵达时间差异定位技术TDOA(Time Difference of Arrival)和增强型观测时间差定位EOTD(Enhanced Observed Time Differ-ence)等。两种定位方式在移动定位方向都得到了广泛的应用,阐述了这两者之间的区别与联系,分析了各自的定位精度,并展望了移动定位未来的发展方向。
GPS移动定位概述移动终端的位置信息是移动位置服务中的关键信息,利用移动定位信息开展的服务将是移动通信上的一种特色服务。常见的移动定位有GPS移动定位和基于移动网络的定位,下面就它们的定位原理逐一介绍。
01GPS系统简要介绍
全球定位系统(GPS)是20世纪70年代初在美军“子午卫星导航定位系统-NNSS系统”的技术上发展而来的,具有全球性、全能性(陆地、海洋、航空与航天)、全天候性优势的导航定位、定时、测速系统。GPS一般可采用4颗卫星的测量数据来计算一个移动用户的位置,即经度、纬度和高度。原始数据可以由终端处理,也可以送到网络端处理。GPS在天空晴朗时,单点定位可以获得5-40m的精度。
02GPS定位原理
GPS系统是利用卫星进行测时、测距的定位系统。按定位方式GPS定位分为单点定位和相对定位(差分定位),单点定位方式就是根据一台接收机的观测数据来确定接收机的位置,它只能采用伪距观测量,可用于车、船等大众导航定位。相对定位(差分定位)是根据两台以上接收机的观测数据来确定观测点之间的相对位置的方法,它既可采用伪距观测量也可采用相位观测量。大地测量或工程测量等对精度要求特别高的应用均采用相位观测值进行相对定位。
在单点定位中采用TOA(Time of A rrival)定位法,用伪距决定卫星与接收机之间的距离。用户可通过GPS接收机接收卫星信号来测定卫星信号传播的时间延迟或相位延迟,由此计算出接收机与GPS卫星间的距离。采用3颗卫星,利用三维坐标中的距离公式,就可以组成3个方程式,从而解出观测点的位置(X、Y、Z),考虑到卫星的时钟与接收机时钟之间的误差,实际上有4个未知数(X、r、Z和时钟偏差),因而需要引入第4颗卫星,形成4个方程式进行求解,从而得到观测点的经纬度和高程。利用接收机和4颗GPS卫星之间的伪距,可以建立以下伪距方程:
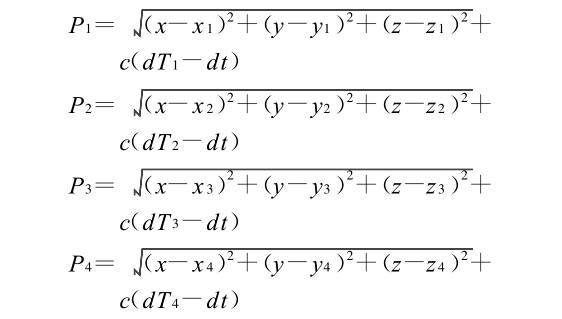
式中:P1、P2、Ps、P分别为观测到的伪距;(xi,yi,z)(xz,yz,z)(x3,3,3)(x,4,z4)为从导航电文得到的卫星位置坐标;dT1、dT2、dT3、dT4为已知卫星时钟偏差,可从卫星导航信息中取得;c为光速;dt为未知接收机时间偏差。通过求解以上伪距方程,就能得到接收机位置及时钟偏差,由于接收机可以锁定4颗以上的卫星,因此接收机可按卫星的星座分布分成若干组,每组4颗,然后通过算法挑选出误差最小的一组用于定位,从而进一步提高定位精度。
移动网络定位概述移动定位涉及移动无线通信技术、数学和计算机科学技术等多个学科的知识。获取移动定位信息的定位技术及其定位系统已经成为当前的研究热点。常见的基于网络的移动定位技术有如下几种。
1)COO(Cell of Origin)小区定位技术。
起源蜂窝小区(CO0)定位技术是最简单的一种定位方式,它根据移动台所处的小区ID号来确定用户的位置。移动台在当前小区注册后,在系统的数据库中就会有相对应的小区ID号。只要系统能够把该小区基站设置的中心位置(在当地地图中的位置)和小区的覆盖半径广播给小区范围内的所有移动台,这些移动台就能知道它处在什么地方,查询数据库即可获取移动台的位置。
2)AOA(Arrival of Angle)到达角定位技术。
简单地说,AOA定位技术测量的是BTS(基站)和MS(移动台)之间信号到达的角度,根据信号到达的角度,可以确定MS相对于BTS的角度关系。只要测量一个MS距2个BTS的信号的到达角度,就可得到从BTS到MS的轨迹直线,两条直线的交点自然就是MS的位置。
3)TOA(Time of Arrival)抵达时间定位。
TOA方法是基于信号从移动台(MS)到达消息测量单元(三个或更多)的时间来测量的。因为电磁波以恒速传播,信号传播距离与传播的时间成正比,所以只要知道测量基站与移动台之间信号传播时间,就可以得到它们的间距。这样,基站位置在已知的情况下,移动台的位置就可以被求出。与EOTD类似,TOA也通过计算信号从移动设备到3个基站的传输时间差来获得位置信息的。不同的是,TOA系统中没有使用位置测量单元,而是通过与在基站上安装了GPS或原子钟的无线网络的同步来实现。
4)TDOA(Time Difference of A rrival)抵达时间差异定位技术。
TDOA定位的值是根据一对TOA相减而得来的,这样,移动台的位置信息可以由双曲线的三角测量得出。与TA和OTD以移动终端为主进行时差测定的方法不同,它是根据在不同基站所接收到的同一移动终端信号在传播路径上的时延差异实现终端定位的。在该方法中,处于不同位置的多个基站同时接收由移动终端发出的普通信息分组(Normal Burst)或随机接入分组(Random Ac-cess Burst),各基站将接收到的上述分组的时间信息传送到移动终端定位中心(MLC),MLC根据信号的抵达时间差异(TDOA)完成终端位置测算。
5)EOTD(Enhanced Observed Time Differ-ence)增强型观测时间差定位。
EOTD定位技术是基于OTD定位技术发展而来的技术。它需要用两个BTS信号到达一个MS的时间差。其测量可以由手机完成而不需要增加任何硬件设备。OTD的测量方法可以用于同步、一般在伪同步网络中,在同步网络中,MS测量多个BTS信号的相对到达时间来进行定位计算;而在不同步网络中,还需要一个位置测量单元(LMU),Ms的位置信息通过测量BTS发送给MS信号的地理时间延迟来推算。当多个BTS的传输帧(bursts)不同步时,网络需要不同基站间的实际时间差(RTD),以得到正确的三角测量。对于非同步BTS系统的0TD测量,其中所用的RTD还需最少3个在地理位置上独立的BTS,如果所有的信息在MS里可用,在本地网络的手机自己就可以完成所有的计算,所以该算法会由现有的手机辅助测量过渡到由手机自己进行。
两种定位方式在移动定位中的应用及其精度分析
从上面的叙述中,可以看出两种定位方式所依据的原理差别很大,同样,它们的定位适用情况和精度也存在较大的不同。下面将以实际的数据和例子对它们的定位精度进行分析。
01移动GPS定位精度分析
移动终端GPS定位可采用内置的GPS模块或者外接的手持GPS,移动GPS的定位精度在市区约20 m,在郊外精度会高一些。下面为某地的两位置点(儿童福利院和口腔医院)的移动GPS观测记录及其定位结果分析数据。经线和赤道上1秒相当于30.8 m,纬度线上1s则相当于30.8m乘以其纬度的余弦值。

表1 时速10 km儿童福利院精度表

表2 时速20 km儿童福利院精度表

表3 时速40 km儿童福利院精度表

表4 时速10km口腔医院精度表

表5 时速20km口腔医院精度表

表6 时速40km口腔医院精度表

表7 静态情况下儿童福利院精度表

表8 静态情况下口腔医院精度表
总结以上实验成果, 得到如下的精度表:

表9 精度表
该精度表也可以用如下的折线图来直观地表示。
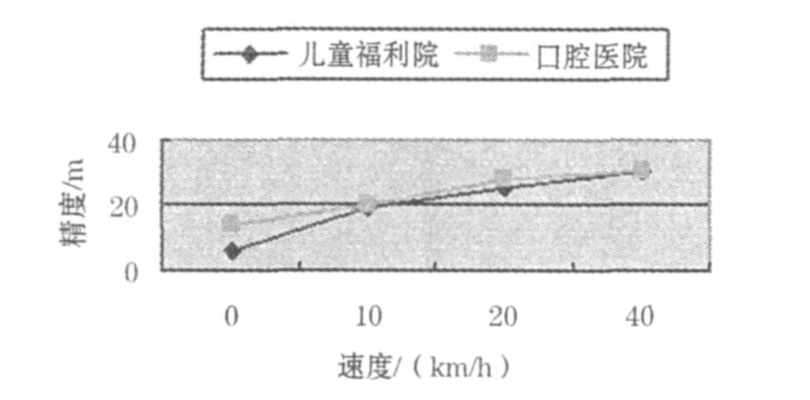
图1移动GPS的不同速度的精度图
从上图1可以看出,移动GPS的定位精度随着运动速度的增加而精度降低,但精度变化不大。同时,根据选定的两个观测点的定位精度取其平均值得到基站定位区域圆的半径阈值为30 m。
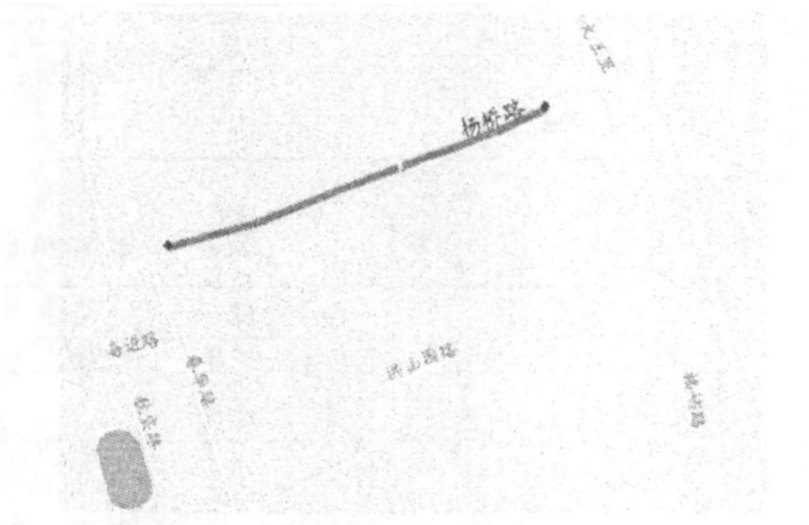
图2移动GPS实测数据与准确数据比较效果图
图2为在ArdGIS中,1:20000比例尺下移动GPS实测数据与现有的福州数据相比较的效果图。
图2中深色线条为移动GPS实测数据,其他颜色线条为现有的准确道路数据,从中可以看出,移动GPS的观测精度是比较高的,可以满足城市导航定位的要求。
但是,移动GPS第一次开始定位的时间比较长,有的时候需要将近十分钟来搜索卫星。特别是当遮挡比较严重时,得不到准确定位结果,同时,也会因为多路径效应的关系,定位的误差很大。如果第一次定位成功,可以选择持续搜星状态,但很明显移动GPS的耗电量很大。对于电容量有限的手机来说,这种定位方式不实用。
02基于网络的定位精度分析
移动基站定位是依据信号的强弱,按照特定的算法进行位置计算定位的,所以定位结果会有一个误差。对应不同情况下,定位误差范围大小不同,每次定位的结果都用一个扇形范围来表示。该地理精度扇形范围的面积计算公式

式中:n为扇形角度(Extent Angle);R为内圆半径;AW是扇形弧的宽度,即内外圆之间的距离(ArcWidth)
运用Ericsson的MPS系统模拟移动网络定位,得到不同时刻,不同移动终端定位结果如图3所示。
三种情况下,终端定位结果的区域面积分别为:
(a):18 246.3701
(b):18 246.3701
(c):950 331.778
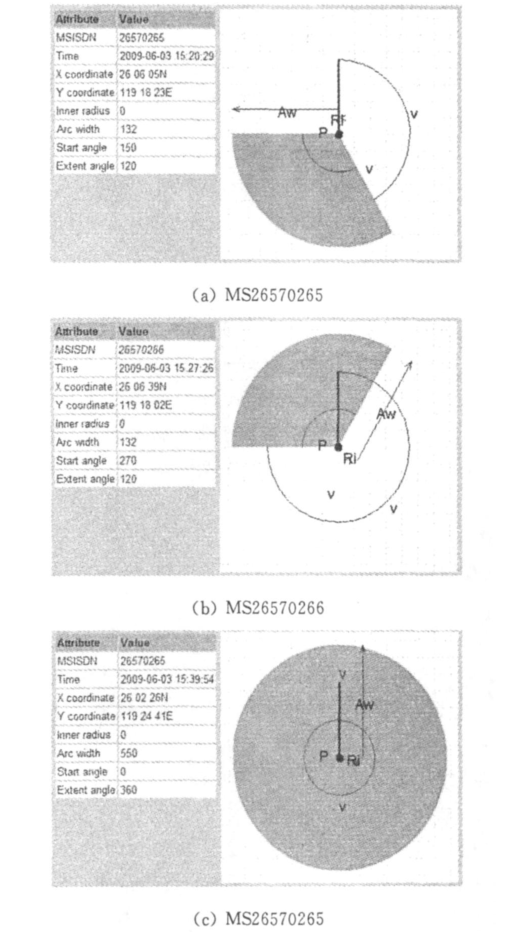
图3 移动定位地理精度范围示意图
从图3中(a)、(c)可以看出,相同移动终端在不同时刻其定位结果所处区域不同,造成这个结果的原因在于移动终端在不同时刻所处地理位置的基站布置密度不同,(a)中定位是在市中心,(c)的定位则发生在基站比较稀少的郊区,所以,两种情况下的定位半径差别较大。相应地移动终端的定位精度差异较大。图3中(a)、(b)表明了不同终端在相近时刻的定位结果区域也是不同。
结论两种定位方式原理上差别很大,GPS定位方式主要发生在移动终端,对终端设备的性能要求较高,能够接收GPS卫星信号,其定位精度比较高。但其定位速度较慢,特别是首次定位时间很长,难于实现快速移动定位。同时,GPS定位受外界的影响比较明显,比如多路径效应、恶劣天气等的影响,而且,在室内没有信号。基于网络的移动定位的计算实现都在服务器端的定位平台完成,只要能接收移动信号的移动终端都能满足要求,所以,这种方式对移动终端设备的要求很低,同时,其定位速度很快,能实现快速移动定位,并且能耗低。但是,这种方式的定位精度较低,受移动基站的分布密度影响很大。可见,两种定位方式的优缺点明显。为了更好地服务于移动位置应用,综合应用两种定位方式是必然的选择。当前,已有的AGPS GPSOne就是两者综合应用的技术,同时,对两种定位方式的自适应运用也是一种值得推荐的方式。
来源:全球定位系统
作者:邬群勇、张爱国、许其凤、张攀攀、查灵

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









