






算法基础
首先要知道什么是角点?角点指的是两条边的交点,在图像处理中是指那些可以表示像素变化,例如局部最大最小的灰度的点。图像的特征类型一般为:
边缘
角点(感兴趣的关键点)
斑点(感兴趣区域)
角点在保留图像的重要特征的同时,可以有效的减少信息的计算量,使其信息含量很高,可以有效的提高计算速度,和有利于图像的匹配,使得实时处理成为可能。
算法原理
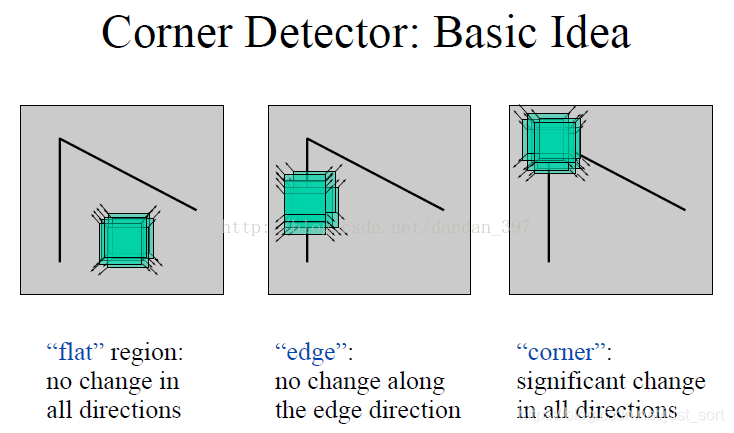 通过这个图可以看到,大概就是在某一个像素点周围有一个滑动窗口,当这个滑动窗口在各个方向进行小范围移动的时候,我们看一下像素的平均灰度值的变化情况。公式可以表示为:
通过这个图可以看到,大概就是在某一个像素点周围有一个滑动窗口,当这个滑动窗口在各个方向进行小范围移动的时候,我们看一下像素的平均灰度值的变化情况。公式可以表示为:
E(u,v)=∑x,yw(x,y)[I(x+u,y+v)−I(x,y)]2E(u, v)=sum_{x,y}w(x,y)[I(x+u, y+v)-I(x,y)]^2E(u,v)=∑x,yw(x,y)[I(x+u,y+v)−I(x,y)]2,其中u,vu,vu,v是窗口在水平,竖直方向的偏移,然后,这里要对在(x+u,y+v)在(x,y)点进行二阶泰勒级数展开,然后取一阶近似,这个公式的展开,可以百度一下二阶泰勒级数的近视,得到E(u,v)E(u,v)E(u,v)约等于∑x,yw(x,y)[I(x+y)+uIx+vIy−I(x,y)]2=∑x,y[uIx+vIy]2=(u,v)∑x,yw(x,y)[IxIy,IxIyIxIy,IyIy][uv]sum_{x,y}w(x,y)[I(x+y)+uI_x+vI_y-I(x,y)]^2=sum_{x,y}[uI_x+vI_y]^2=(u ,v)sum_{x,y}w(x,y)begin{bmatrix}I_xI_y , I_xI_y\ I_xI_y, I_yI_yend{bmatrix}begin{bmatrix}u\v end{bmatrix}∑x,yw(x,y)[I(x+y)+uIx+vIy−I(x,y)]2=∑x,y[uIx+vIy]2=(u,v)∑x,yw(x,y)[IxIy,IxIyIxIy,IyIy][uv],其中∑x,yw(x,y)[IxIy,IxIyIxIy,IyIy]sum_{x,y}w(x,y)begin{bmatrix}I_xI_y , I_xI_y\ I_xI_y, I_yI_yend{bmatrix}∑x,yw(x,y)[IxIy,IxIyIxIy,IyIy]被我们叫做结构张量。我们需要寻找一个这样的点,无论我们如何取(u,v),E(u,v)都是变化较大的,这个像素点就是我们需要找的角点。接下来的推导,大家可以去看:https://blog.csdn.net/linqianbi/article/details/78930239 这位博主的,我的理解就是结构张量的IxI_xIx和IyI_yIy的变化情况可以反应像素是边(edge)还是角点(corner),还是面(flat)。然后通过两个变量来判断角点不诗很方便,所以论文提出了一个角点响应函数R(corner response function),R=detM−k(traceM)2R=detM-k(trace M)^2R=detM−k(traceM)2,其中detM=λ1λ2detM = lambda_1lambda_2detM=λ1λ2,traceM=λ1+λ2trace M=lambda1+lambda_2traceM=λ1+λ2,k是一个[0.04,0.06][0.04,0.06][0.04,0.06]的常数,现在的判断逻辑为:
角点:R为大数值整数
边缘:R为大数值负数
平坦区:绝对值R是小数值
算法步骤
1利用Sobel算子计算除XY方向的梯度值
2计算出lx2lx^2lx2,ly2ly^2ly2,lx∗lylx*lylx∗ly
3利用高斯函数对lx2,ly2,lx∗lylx^2,ly^2,lx*lylx2,ly2,lx∗ly进行滤波
4计算局部特征结果矩阵M的特征值和响应函数C(i,j)=Det(M)−k(trace(M))2(0.04<=k<=0.06)C(i,j)=Det(M)-k(trace(M))^2(0.04<=k<=0.06)C(i,j)=Det(M)−k(trace(M))2(0.04<=k<=0.06)
5将计算出响应函数的值C进行非极大值抑制,滤除一些不是角点的点,同时满足大于设定的阈值
代码实现
Mat RGB2GRAY(const Mat &src){
if(!src.data || src.channels()!=3){
exit(1);
}
int row = src.rows;
int col = src.cols;
Mat gray = Mat(row, col, CV_8UC1);
for(int i = 0; i < row; i++){
for(int j = 0; j < col; j++){
gray.at(i, j) = (uchar)(0.114 * src.at(i, j)[0] + 0.587 * src.at(i, j)[1] + 0.299 * src.at(i, j)[2]);
}
}
return gray;
}
void SobelGradDirction(Mat &src, Mat &sobelX, Mat &sobelY){
int row = src.rows;
int col = src.cols;
sobelX = Mat::zeros(src.size(), CV_32SC1);
sobelY = Mat::zeros(src.size(), CV_32SC1);
for(int i = 0; i < row-1; i++){
for(int j = 0; j < col-1; j++){
double gradY = src.at(i+1, j-1) + src.at(i+1, j) * 2 + src.at(i+1, j+1) - src.at(i-1, j-1) - src.at(i-1, j) * 2 - src.at(i-1, j+1);
sobelY.at(i, j) = abs(gradY);
double gradX = src.at(i-1, j+1) + src.at(i, j+1) * 2 + src.at(i+1, j+1) - src.at(i-1, j-1) - src.at(i, j-1) * 2 - src.at(i+1, j-1);
sobelX.at(i, j) = abs(gradX);
}
}
//将梯度数组转换为8位无符号整形
convertScaleAbs(sobelX, sobelX);
convertScaleAbs(sobelY, sobelY);
}
Mat SobelXX(const Mat src){
int row = src.rows;
int col = src.cols;
Mat_ dst(row, col, CV_32FC1);
for(int i = 0; i < row; i++){
for(int j = 0; j < col; j++){
dst.at(i, j) = src.at(i, j) * src.at(i, j);
}
}
return dst;
}
Mat SobelYY(const Mat src){
int row = src.rows;
int col = src.cols;
Mat_ dst(row, col, CV_32FC1);
for(int i = 0; i < row; i++){
for(int j = 0; j < col; j++){
dst.at(i, j) = src.at(i, j) * src.at(i, j);
}
}
return dst;
}
Mat SobelXY(const Mat src1, const Mat &src2){
int row = src1.rows;
int col = src1.cols;
Mat_ dst(row, col, CV_32FC1);
for(int i = 0; i < row; i++){
for(int j = 0; j < col; j++){
dst.at(i, j) = src1.at(i, j) * src2.at(i, j);
}
}
return dst;
}
void separateGaussianFilter(Mat_ &src, Mat_ &dst, int ksize, double sigma){
CV_Assert(src.channels()==1 || src.channels() == 3); //只处理单通道或者三通道图像
//生成一维的
double *matrix = new double[ksize];
double sum = 0;
int origin = ksize / 2;
for(int i = 0; i < ksize; i++){
double g = exp(-(i-origin) * (i-origin) / (2 * sigma * sigma));
sum += g;
matrix[i] = g;
}
for(int i = 0; i < ksize; i++) matrix[i] /= sum;
int border = ksize / 2;
copyMakeBorder(src, dst, border, border, border, border, BORDER_CONSTANT);
int channels = dst.channels();
int rows = dst.rows - border;
int cols = dst.cols - border;
//水平方向
for(int i = border; i < rows - border; i++){
for(int j = border; j < cols - border; j++){
float sum[3] = {0};
for(int k = -border; k<=border; k++){
if(channels == 1){
sum[0] += matrix[border + k] * dst.at(i, j+k);
}else if(channels == 3){
Vec3f rgb = dst.at(i, j+k);
sum[0] += matrix[border+k] * rgb[0];
sum[1] += matrix[border+k] * rgb[1];
sum[2] += matrix[border+k] * rgb[2];
}
}
for(int k = 0; k < channels; k++){
if(sum[k] < 0) sum[k] = 0;
else if(sum[k] > 255) sum[k] = 255;
}
if(channels == 1)
dst.at(i, j) = static_cast(sum[0]);
else if(channels == 3){
Vec3f rgb = {static_cast(sum[0]), static_cast(sum[1]), static_cast(sum[2])};
dst.at(i, j) = rgb;
}
}
}
//竖直方向
for(int i = border; i < rows - border; i++){
for(int j = border; j < cols - border; j++){
float sum[3] = {0};
for(int k = -border; k<=border; k++){
if(channels == 1){
sum[0] += matrix[border + k] * dst.at(i+k, j);
}else if(channels == 3){
Vec3f rgb = dst.at(i+k, j);
sum[0] += matrix[border+k] * rgb[0];
sum[1] += matrix[border+k] * rgb[1];
sum[2] += matrix[border+k] * rgb[2];
}
}
for(int k = 0; k < channels; k++){
if(sum[k] < 0) sum[k] = 0;
else if(sum[k] > 255) sum[k] = 255;
}
if(channels == 1)
dst.at(i, j) = static_cast(sum[0]);
else if(channels == 3){
Vec3f rgb = {static_cast(sum[0]), static_cast(sum[1]), static_cast(sum[2])};
dst.at(i, j) = rgb;
}
}
}
delete [] matrix;
}
Mat harrisResponse(Mat_ GaussXX, Mat_ GaussYY, Mat_ GaussXY, float k){
int row = GaussXX.rows;
int col = GaussXX.cols;
Mat_ dst(row, col, CV_32FC1);
for(int i = 0; i < row; i++){
for(int j = 0; j < col; j++){
float a = GaussXX.at(i, j);
float b = GaussYY.at(i, j);
float c = GaussXY.at(i, j);
dst.at(i, j) = a * b - c * c - k * (a + b) * (a + b);
}
}
return dst;
}
int dir[8][2] = {0, 1, 0, -1, 1, 0, -1, 0, 1, 1, 1, -1, -1, 1, -1, -1};
void MaxLocalValue(Mat_&resultData, Mat srcGray, Mat &resultImage, int kSize){
int r = kSize / 2;
resultImage = srcGray.clone();
int row = resultImage.rows;
int col = resultImage.cols;
for(int i = r; i < row - r; i++){
for(int j = r; j < col - r; j++){
bool flag = true;
for(int k = 0; k < 8; k++){
int tx = i + dir[k][0];
int ty = j + dir[k][1];
if(resultData.at(i, j) < resultData.at(tx, ty)){
flag = false;
}
}
if(flag && (int)resultData.at(i, j) > 18000){
circle(resultImage, Point(i, j), 5, Scalar(0, 0, 255), 2, 8, 0);
}
}
}
}
效果
 原图
原图
 效果图
效果图















 1621
1621











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









