




 本文介绍了双目立体视觉如何利用三角测量原理建立深度图。通过相机标定获取内外参数,结合本质矩阵和基础矩阵,确定图像中的对应点,从而计算深度信息。图像矫正和滑动窗口匹配等技术用于提高匹配精度,实现深度图的构建。
本文介绍了双目立体视觉如何利用三角测量原理建立深度图。通过相机标定获取内外参数,结合本质矩阵和基础矩阵,确定图像中的对应点,从而计算深度信息。图像矫正和滑动窗口匹配等技术用于提高匹配精度,实现深度图的构建。

文章来自团队微信公众号,可以直接搜索“PrecisionEngineering”关注。
- 单目相机标定回顾:视觉传感 | 相机标定
从上一节的单目相机标定后,我们得到了相机的内参和外参,能够通过计算得到图像平面上像素点的坐标与对应的棋盘格平面上的坐标。
回忆相机标定时的假设条件,世界坐标系的XY平面与棋盘格纸面重合,即Z向坐标为零。因此也就无法得出棋盘格上物点和图像平面之间的相对深度。在无先验知识的情况下,单个静止的相机无法获得图像的深度信息。
2. 可以通过典型的三角测量的方法来实现深度的测量。

"Sailing School: Fun with Triangulation & Weird Headsl's"
一个关于航海的油管视频,可以大概了解航海用三角测距的用法,测量标志物(如灯塔)的距离来确定船只在地图中的位置。
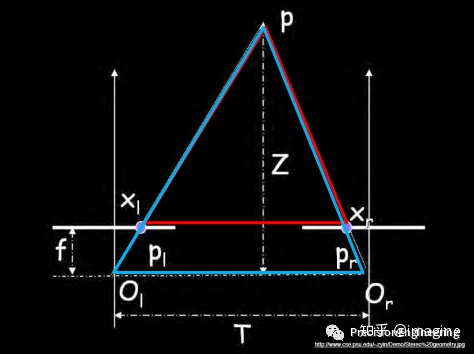
双目相机同样采用三角测量的原理:三角形全等条件中,一边两角可以确定唯一的三角形,因此也就可以得出特定物点的深度。
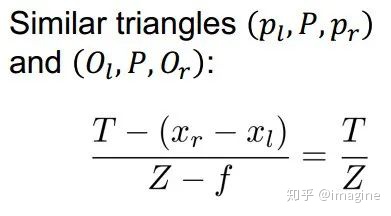
在双目相机的具体实现层面上,则是通过找到两个相机中对应物理世界点P的两个对应点Pl和Pr的图像坐标,对三角形OlpOr进行求解可以获得物理世界点P的深度信息Z。如下图所示。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2151
2151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









