





“ 图。”
01
—
图的基本定义与基本术语
基本概念
图(Graph)是由顶点的集合和顶点之间边的集合组成,通常表示为:
G(V,E)
其中,G表示一个图,V是图G中顶点的集合,E是图G中边的集合。在图中的数据元素,我们称之为顶点(Vertex),顶点集合有穷非空。在图中,任意两个顶点之间都可能有关系,顶点之间的逻辑关系用边来表示,边集可以是空的。图是非常复杂的非线性结构,表达能力强。
图有有向图,无向图,连通图,强连通图,完全图,赋权图,稀疏图,稠密图多种类型。
权(Weight):与图的边或弧相关的数。
网(Network):带权的图。
子图(Subgraph):假设G=(V,{E})和G‘=(V',{E'}),如果V'包含于V且E'包含于E,则称G'为G的子图。
度(Degree):无向图中,与顶点V相关联的边的数目。有向图中,入度表示指向自己的边的数目,出度表示指向其他边的数目,该顶点的度等于入度与出度的和。
路径的长度:一条路径上边或弧的数量。
连通图:图中任意两个顶点都是连通的,仅需要调用一次搜索过程,即从任一个顶点出发,便可以遍历图中的各个顶点。
非连通图:需要多次调用一次搜索过程,而每次调用得到的顶点访问序列恰为各连通分量的顶点集。调用搜索过程的次数就是该图连通分量的个数。
连通分量:无向图中的极大连通子图。(子图必须是连通的且含有极大顶点数)。图1有两个连通分量
强连通分量:有向图中的极大强连通子图。
生成树:无向图中连通且n个顶点n-1条边叫生成树。
有向树:有向图中一顶点入度为0其余顶点入度为1。
森林:一个有向图由若干棵有向树构成生成森林。
02
—
图的存储结构
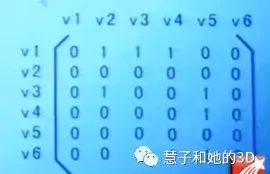
邻接矩阵:边的集合,用两个数组,一个数组保存顶点集,一个数组保存边集邻接表(数组与链表相结合的存储方法),十字链表,邻接多重表:链接方式
邻接矩阵n*n和邻接表(邻接表只存有用信息,表头和边表,方便定位)最常用的储存结构,适用于有向图(网)无向图(网)表示与处理
03
—
图的遍历
遍历
1 设置访问标识数组,以走遍所有顶点,防止走回路
2 遍历规律及支撑技术(可用邻接矩阵和邻接表实现)
深度优先 (递归) -- 类似树的先序遍历
从图中某个顶点v出发,访问此顶点,然后从v的未被访问的邻接点出发深度优先遍历图,直至图中所有和v有路径相通的顶点都被访问到。
# 图的深度优先遍历# 1.利用栈实现# 2.从源节点开始把节点按照深度放入栈,然后弹出# 3.每弹出一个点,把该节点下一个没有进过栈的邻接点放入栈# 4.直到栈变空DFS(u)for each neighbor v of u if v is unvisited, tree edge, DFS(v) else if v is explored, bidirectional/back edge else if v is visited, forward/cross edge广度优先(队列)-- 类似于树的层次遍历
04
—
图的应用
图的遍历算法是图应用的重要基础。
求解生成树,最小生成树,连通分量,拓扑排序,关键路径,单源最短路径及所有顶点之间最短路径的重要算法应用。
4.1 图的连通性问题--遍历的直接应用
1 无向图的连通分量
2 两顶点之间的简单路径
3 生成树
4 最小生成树
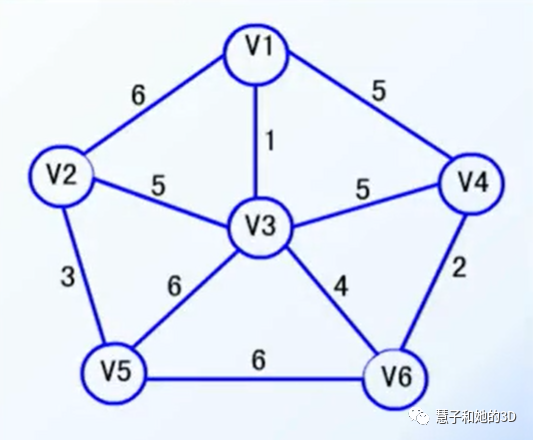
最小生成树:构造连通网的最小代价生成树。
重要性质:设N={V,{E}}是一个连通网,U是顶点集V的一个非空子集。若(u,v)是一条具有最小权值的边,其u∈U ,v∈V-U,则存在一颗包含边(u,v)的最小生成树。
反证法证明最小生成树的性质:
假设不存在这样一颗包含边(u,v)的最小生成树。任取一颗最小生成树T,将(u,v)加入T中。根据数的性质,此时T中必形成一个包含(u,v)的回路,且回路中必有一条边(u',v')的权值大于或者等于(u,v)的权值。删除(u,v),则得到一颗代价小于等于T的生成树T',且T'为一颗包含边(u,v)的最小生成树,这与假设矛盾。
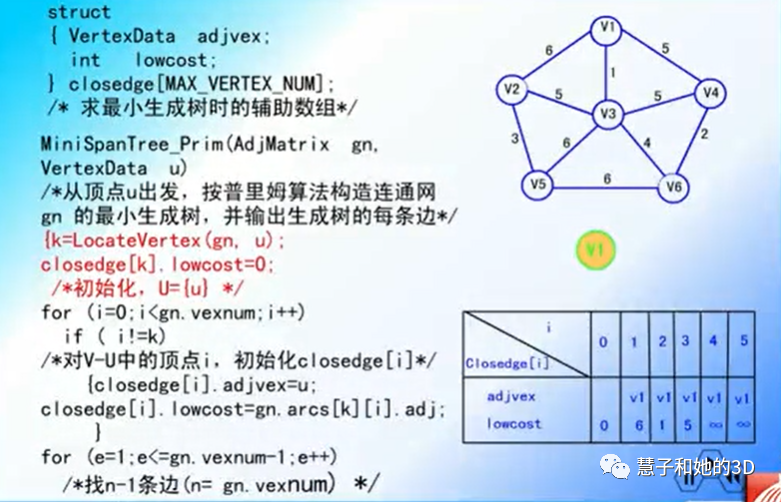
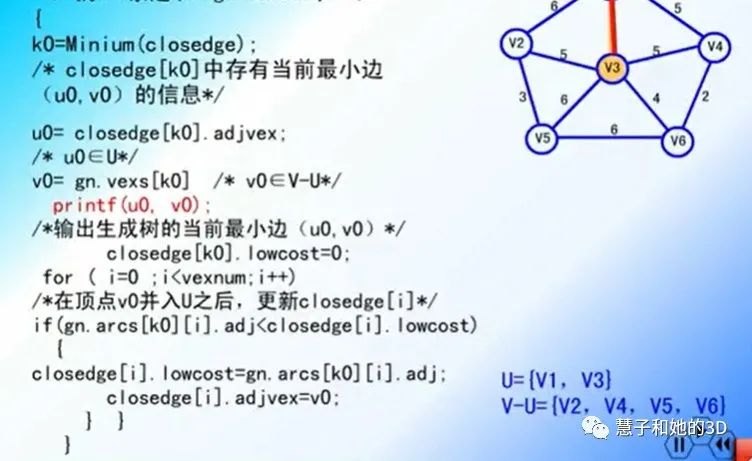
普里姆(prime):
第一种:先将一个起点加入最小生成树,之后不断寻找与最小生成树相连的边权最小的边能通向的点,并将其加入最小生成树,直至所有顶点都在最小生成树中。
第二种:
1.将一个图的顶点分为两部分,一部分是最小生成树中的结点(A集合),另一部分是未处理的结点(B集合)。
2.首先选择一个结点,将这个结点加入A中,然后,对集合A中的顶点遍历,找出A中顶点关联的边权值最小的那个(设为v),将此顶点从B中删除,加入集合A中。
3.递归重复步骤2,直到B集合中的结点为空,结束此过程。
4.A集合中的结点就是由Prime算法得到的最小生成树的结点,依照步骤2的结点连接这些顶点,得到的就是这个图的最小生成树。
4.2 有向无环图的应用
1 拓扑排序
2 关键路径
求拓扑排序的基本思想: 有向无环才可求拓扑序列 1 从有向图中选一个无前驱的顶点输出,2 将此顶点和以它为起点的弧删除3 重复1 2直至不存在无前驱的顶点,4 若此时输出的顶点数小于有向图中的顶点数,则说明有向图中存在回路,否则输出的顶点的顺序即为一个拓扑序列。基于邻接矩阵表示的存储结构,
A为有向图G的邻接矩阵,则有
1 找栈中无前驱的顶点--在A中找到值全为0的列。
2 删除以i为起点的所有弧--将矩阵中i对应的行全部置为0
算法步骤为
1 取1作为第一新序号
2找一个未编号的,值全为零的列j,若找到,则转到3;否则所有的列全部都编 过号,拓扑排序结束;若有列为曾被编号,则该图中有回路
3 输出列号对应的顶点j,把新序列号赋给所找到的列,
4 将矩阵中既对应的行全部置为零,
5 新序列加1,转2
基于邻接表的存储结构
入度为零的顶点即没有前驱的顶点,因此我们可以附设一个存放各顶点入度的数组indegree[],于是有
1 找G中无前驱的顶点--查找indegree[i]为零的顶点vi,
2 删除以i为起点的所有弧--对链在顶点i后面的所有连接顶点k,可以将对应的indegree[k]减1。
关键路径
AOE网
在AOE--网中的基本概念
几个重要的定义,
求光线路径的基本步骤,
修改后的拓扑排序算法,
求关键路径的实现算法。
修正的拓扑排序算法
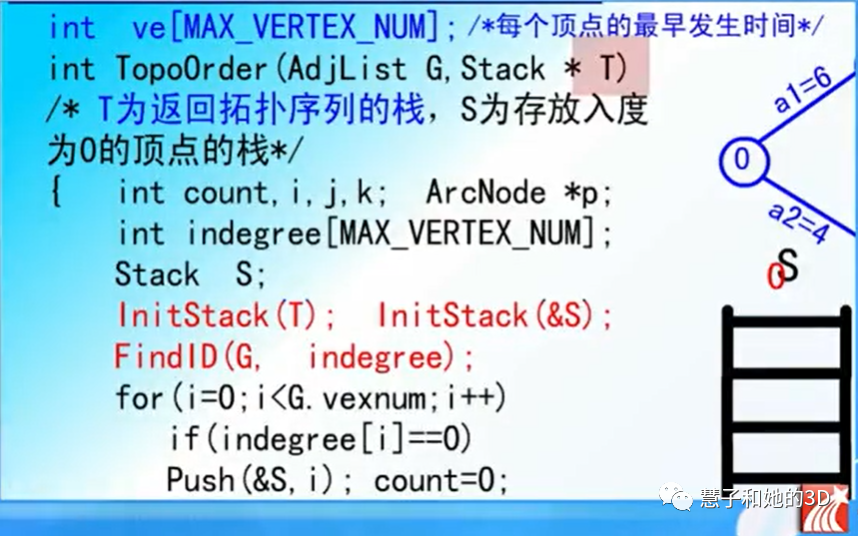
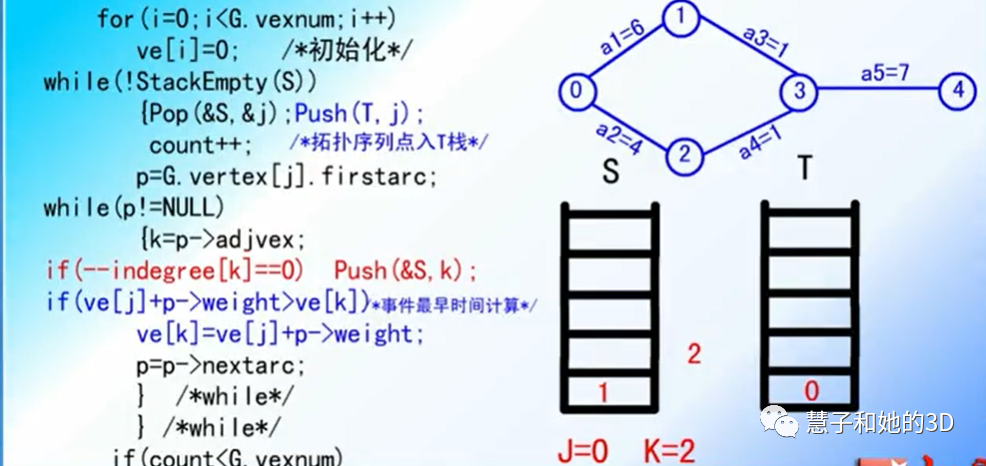
增加T栈增加ve,事件发生最早时间,初始化数组为0,计算结束保存在T栈
邻接表求关键路径--拓扑排序主要是为解决一个工程能否顺序进行的问题,但有时我们还需要解决工程完成需要的最短时间问题。增加了weight域,用来存储弧的权值。
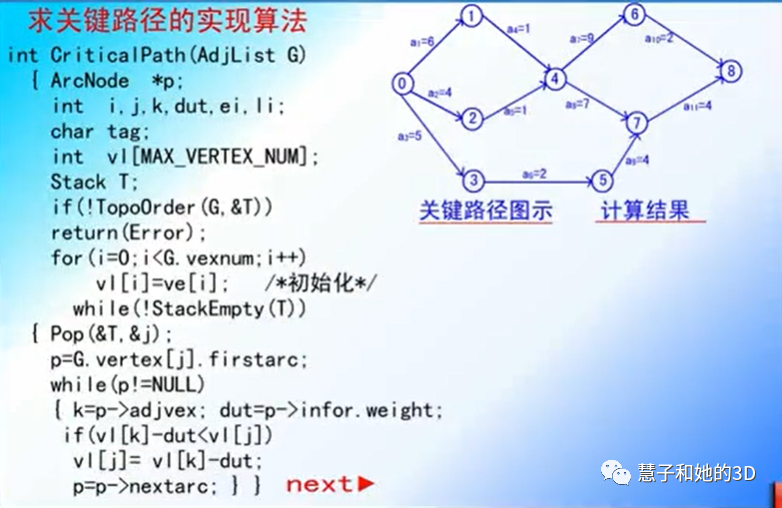
求关键路径的基本步骤:
1 对途中顶点进行拓扑排序,在排序过程中按拓扑排序求出每个事件的最早发生时间etv
2 按逆拓扑序列求每个事件的最晚发生时间ltv
3 求出每个活动ai的最早开始时间ete和最晚发生时间lte
4 找出e(i)=I(i)的活动ai,即为关键活动
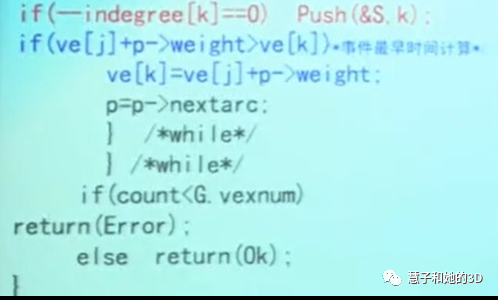
if语句如果求出一个最早发生时间则返回ok
栈循环套的while顺着边表进行循环,把所有和该点有关联的点最迟发生时间求出来
for(j=0;j// 求ei,li和关键活动{ p=G.vextex[j],firstarc; while(p!=NULL) { k=p->Adjvex; dut=p->weight; ei=ve[j]; li=vl[k]-dut; tag=(ei==li)? ' * ' : ' ' ; printf("%c,%c,%d,%d,%d,%c\n",G.vertex[j].data,G.vertex[k].data,dut,ei,li,tag);// 输出关键活动 p=p->nextarc; } return(ok);}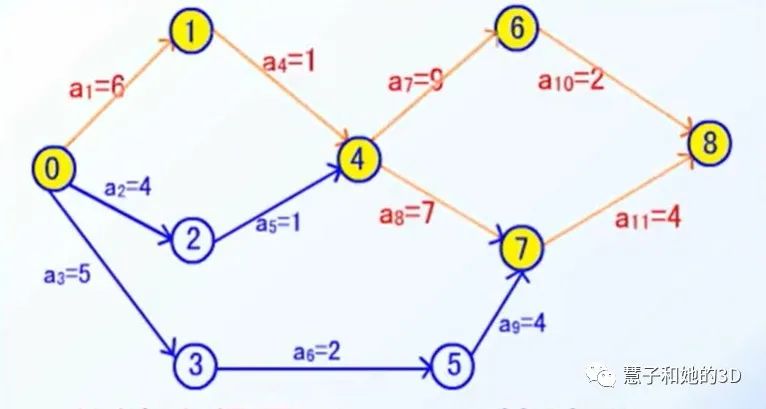

02
—
4.3 最短路径
一顶点到其余个顶点最短路径,可用一维数组表示
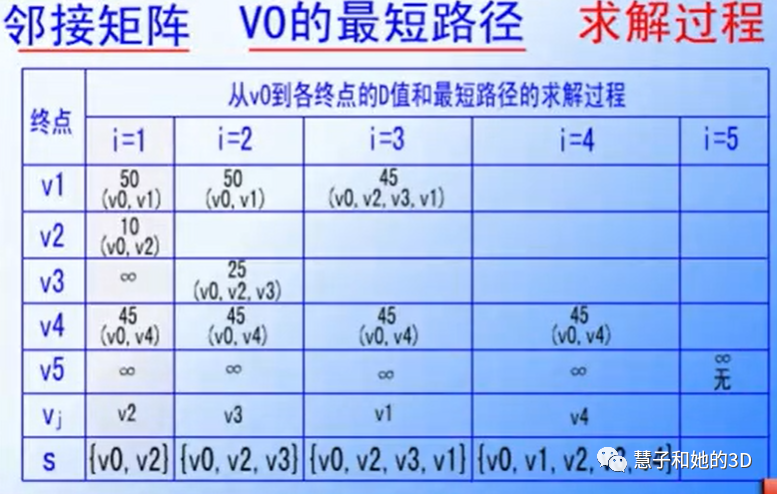
迪杰斯特拉算法(Dijkstra):下一条最短路径或者是弧(v0,vx),或者是中间经过S中的某些顶点,而后到达vx的路径。
反证法证明:
假设下一条最短路径上有一个顶点vy不在S中,即此路径为(v0,……,vy,……vx)。显然(v0,……,vy)的长度小于(v0,……,vy,……vx)的长度,故下一条最短路径应为(v0,……,vy),这与假设的下一条最短路径(v0,……,vy,……vx)相矛盾!因此,下一条最短路径上不可能有不在S中的顶点vy,即假设不成立。
把图中的顶点集合V分成两组,第一组为已求出最短路径的顶点集合S(初始时S中只有源节点,以后每求得一条最短路径,就将它对应的顶点加入到集合S中,直到全部顶点都加入到S中);第二组是未确定最短路径的顶点集合U。
算法步骤:
(1)初始化,g为用邻接矩阵表示的带权图,S只含有源节点S (2)从U中选取一个距离v最小的顶点k加入S中(该选定的距离就是v到k的最短路径长度)使得dist[vk]= min( dist[i] | vi∈V-S ),vk为目前求得的下一条从v0出发的最短路径的终点;
(3)以k为新考虑的中间点,修改U中各顶点的距离;若从源节点v到顶点u的距离(经过顶点k)比原来距离(不经过顶点k)短(dist[k] + g.arcs[k][i]
(4)重复步骤(2)和(3)n-1次,按照最短路径长度递增的顺序,诸葛求出v0到图中其他顶点的最短路径,直到终点在S中。
ShortestPath_DJS(AdjMatrix g ,int v0 ,WeightType dist[MAX_VERTEX_NUM]) /*存放i的当前最短路径长度*/ ,VertexSet path[MAX_VERTEX_NUM]) /*存放i的当前最短路径*/{ VertexSet s; /*s为已经找到的最短路径的终点集*/ for(i=0;i { InitList(&path[i]);// 路径数组的初值 dist[i]=g.arcs[v0][i];// 从i= 1到顶点个数个每次都把v0【i】放在数组的距离初值第i列 if(dist[i] { AddTail(&path[i] , g.vexs[v0]); AddTail(&path[i] , g.vexs[i]); InitList(&s); AddTail(&s , g.vexs[v0]); } } for(t = 1;tn-1在不属于s中的顶点去选择 { Min=MAx; // 记下最小值的下标位置和值,第一个for进行第二步选vk for(i=0;i if(!Member(g.vex[i].s)&&dist[i] { K=i; Min=dist[i]; } AddTail(&s ,g.vexs[k]); // for循环进行修正 ,更新距离数组,路径数组也更新 for(i=0;i { if(!Member(g.vex[i].s)&&dist[k]+g.arcs[k][i] { dist[i]=dist[k]+g.arcs[k][i]; path[i]=path[k]; AddTail(&s ,g.vexs[i]); /*path[i]=path[k]∪{Vi}*/ } } }}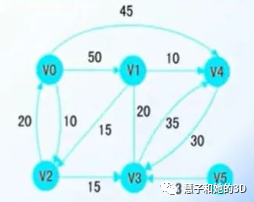


弗洛伊德算法(Floyd):
1,从任意一条单边路径开始。所有两点之间的距离是边的权,如果两点之间没有边相连,则权为无穷大。
2,对于每一对顶点 u 和 v,看看是否存在一个顶点 w 使得从 u 到 w 再到 v 比已知的路径更短。如果是更新它。
经过n次比较和修正,在第(n-1)步,将求得的vi到vj的且中间顶点号不大于n-1的最短路径,这必是从vi到vj的最短路径。
ShortestPath_Floyd(AdjMatrix g ,WeightType dist [MAX][MAX],VertexSet path[MAX] [MAX]){// 经过i j双循环初始化工作,得到初始状态 for(i=0;i<g.vexnum;i++) for(j=0;j<g.vexnum;j++) { InitList(&path[i][j]); // 初始化dist[i][j]和path[i][j],d p两个数组都是n*n的 dist[i][j]=g.arcs[i][j]; if(dist[i][j]<MAX) { AddTail(&path[i][j] , g.vexs[i]); AddTail(&path[i][j] , g.vexs[j]); } for(k=0;k<g.vexnum;k++) for(i=0;i<g.vexnum;i++) for(j=0;j<g.vexnum;j++) if(dist[i][k]+dist[k][j]<dist[i][j]) { // 矩阵阵列经过中间顶点不大于k可达的最小值,进行修正 dist[i][j]=dist[i][k]+dist[k][j]; Path[i][j]=JoinList(path[i][k] , path[k][j]); } }}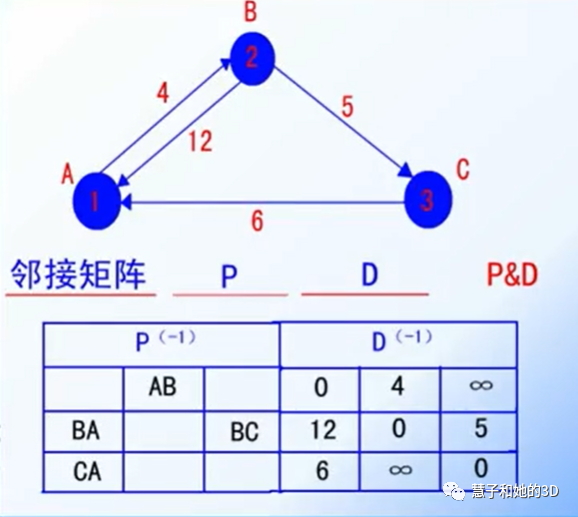


求距离顶点v0的路径长度为k的所有顶点
已知无向图g设计算法求距离顶点为零的最短路径长度v0的所有顶点,要求尽可能的节省时间。
问题分析:
从顶点v0开始进行广度优先搜索,将一步可达的,两步可达的,直至k步可达的所有顶点记录下来,同时用一个队列记录每个节点的称号输出,第k+1层的所有结点即为所求。
Void bfsKLevel (Graph g , int v0 int K){ InitQueue(Q1); /*Q1是存放已访问顶点的队列*/ InitQueue(Q2); /*Q2是存放已访问顶点层号的队列*/ for(i=0;i Visited[i]=FALSE; /*初始化访问标志数组*/ Visited[v0]=TRUE; Level=1; EnterQueue(Q1, v0); EnterQueue(Q2 Level); While(! IsEmpty(Q1)&& Level { V=DeleteQueue(Q1); /*取出已访问的顶点号*/ Level=DeleteQueue(Q2); /*取出已访问的顶点层号*/ W=firstAdjVertex(g , v); /*找到第一个领节点*/ While(w!=-1) { If(!visited[w]) { If(Level==K) printf(“%d”,w); /*输出符合条件的节点*/ Visited[w]=TRUE; EnterQueue( Q1 w); } W=NextAdjVertex(g, v ,m); /*找下一个邻节点*/ } }}层次遍历二叉树
算法思想
1 初始化空队列Q;
2 若二叉树bt为空数,则直接返回;
3 将二叉树的根结点指针bt放入队列Q,
4 若队列非空,则重复如下操作:
队头元素出队并访问该元素;
若该结点的左孩子非空,则该结点的左孩子结点指针入队,
若该结点的右孩子非空,则该结点的右孩子结点指针入队。
支撑方法--队列
层次遍历是指从二叉树的第一层(根结点)开始逐层遍历,同一层中按照从左到右对节点访问,直到二叉树中所有结点均被访问且仅访问一次。
实现层次遍历需采用队列技术
设置一个队列Q,暂存某存已经访问过的结点,同时也保存了该层节点访问的先后次序,按照该层节点访问的次序实现对其下层孩子节点的按次序访问。














 1114
1114











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









