






上一章传送门:
善道:线性系统控制入门(九)设计状态观测器zhuanlan.zhihu.com
上一章我们讨论了状态观测器的设计,实际上这是在实际操作中很必要的一个设计。因为实际上如果各个状态变量未知,那就无法实现控制律的状态反馈了。不过之前几章设计状态反馈控制器时,我们一直都只研究了控制里面的一个问题,那就是系统的平衡问题。
设计反馈控制器的目的,一直都是设法通过系统负反馈来让所有状态变量都处于衰减主导的动态,这样在有限的时间内,系统新动态下的状态变量都会回归到平衡位置。而平衡位置的所在实际上就是由输入变量决定的。
之前在第五章里,我们使用静态前置滤波器(线下前馈控制,offline Planung)就是使用了恒定的输入来调节输入变量,使得系统最终输出和期望的目标平衡点一样。这样我们其实只考虑了始末位置,并没有考虑中间具体历程。在许多实际应用场合,当我们需要运动轨迹也完全受控时,就要使用轨迹追踪反馈控制(Folgeregelung)。
轨迹追踪反馈控制有很多实际意义:
a) 可以主动让一个目标输出轨迹或者说导引信号变得光滑,比如可以让控制输入量减小,没有那么剧烈突变且不需要积分环节;
b) 在
c) 在

10.1 对输出轨迹追踪反馈控制
轨迹追踪控制任务实际上是让输出轨迹
接下来在线性时不变MIMO系统中继续考察。
(10.1)
其中输入控制变量
10.1.1 误差动态和反馈控制律
至今为止的状态反馈控制器的设计在借助输入输出解耦的方式能够直接扩展到轨迹追踪问题中。这样就有在单独预给的目标轨迹
(10.2)
所以任务目标就转化为:让追踪误差的动态渐进稳定到零。对上述系统输入输出解耦
(10.3)
其中矩阵
(10.4)
两个动态方程相减,得到误差动态方程
(10.6)
如果给定误差特征多项式
(10.7)
因为最后一行
(10.8)
所以有追踪误差动态反馈后的新输入
(10.9)
如果有恒定的参考输入信号
定理10.1 渐进的输出追踪反馈控制
给定(10.1)所描述的线性系统,且有相对微分度向量。还有幅值受限的目标轨迹
,
(
次连续可微),那么对于误差动态可以由输出变量反馈渐进镇定。
(10.10)![]()
(10.11)![]()
(10.12)![]()
其中耦合矩阵是,反馈增益为
,
是期望的特征多项式对应的系数,而零动态渐进稳定,那么状态
产生的系统内动态会对任意
的时间区间里受到限制。
反馈控制律直接来自
(10.13)
目标轨迹
10.1.2 包含积分环节的追踪反馈控制
如果系统受到了恒定的外界扰动的侵袭,即扰动输入矩阵
(10.14)
这就导致追踪误差
(10.15)
于是可以继续扩展之前的反馈律
(10.16)
这样能得到新的误差动态
(10.17)
对上式求导,即有需要新给定的扩展一维的特征多项式
(10.18)
(10.19)
把(10.16)代入(10.13)得到最终合成的输入向量
(10.20)
其中对积分的反馈增益,
(10.21)
式(10.20)的反馈控制律一方面表现了在普通控制律上追踪控制器的扩展,另一方面又兼有了PI控制器的相似性。
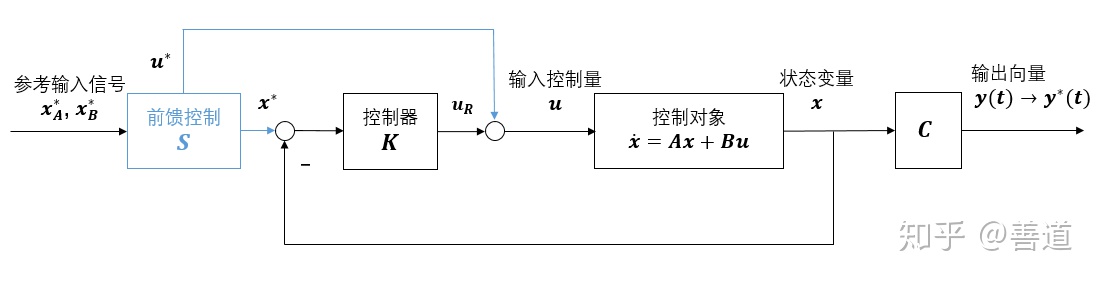
10.2 双自由度反馈控制
除了输出轨迹追踪控制之外,还有一种替代性的方案来实现渐进的追踪控制,那就是——双自由度反馈控制(Zwei-Freiheitsgrade-Regelung)。如图所示,双自由度系统依靠前馈控制和其从属的反馈控制,实现输入控制变量在导引信号和系统自稳定各自分离,独立完成各自的任务。
在本章开头提到过,最常见的控制任务之一就是两个稳定工作点的切换,即从一个平衡点
(10.22)
前馈控制的任务主要就是,在时间区间
(10.23)
这样移动时间
而双自由度系统中的反馈控制器也是必要的,如果系统初值有偏差,即
10.2.1 平坦输出的定义
早在九十年代,Michel Filess,Jean Lévine,Philippe Martin以及Pierre Rouchon就已经为非线性系统定义过平坦性(Flachheit)这个特征。而对于线性系统来说,所谓的平坦性的概念也是能够借来使用的,并且与系统的能控性紧密相关。
当一个系统是平坦的,我们可以说所有的状态变量以及控制变量都可以用一个系统的平坦输出以及它的各阶导数来表示。对于一个这样形式的非线性系统
(10.24)
它的状态变量
定义10.1 平坦输出
一个(10.24)所描述的非线性系统,可以被称作(微分)平坦,当它有和输入相同维度的虚拟输出时。其中虚拟输出应满足以下条件:
①变量本身是可以由关于状态变量
以及输入变量
以及其有限次关于时间导数
的函数表示。
(10.25)![]()
②反过来,状态变量以及输入变量
也可由
及其有限次关于时间导数
的函数表示。
(10.26)![]()
(10.27)![]()
③所有的的导数作为描述参数必须彼此各阶微分线性无关,即不存在这样的微分方程
(10.28)![]()
如果上述条件都满足(对非线性系统至少局部满足),那么就称式(10.25)定义的虚拟输出为平坦输出,而对应的系统就是平坦的。
平坦输出
(10.29)
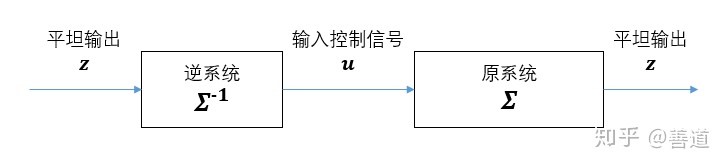
这种情况下,会把这个虚拟输出表示的系统称为逆系统
(10.30)
原系统和逆系统的关系可以用下图直观表示
例10.1 非线性系统的平坦输出
(10.31)
有这样一个SISO的非线性系统,可以选择系统的
(10.32)
平坦输出对于前馈控制的设计是直接显然的,因为借助定义(10.1)里面(10.25)-(10.29)的关系,能轻松地用微分参数化表达的逆系统下的平坦目标轨迹
(10.33)
10.2.2 线性系统的平坦输出
平坦输出经常在物理上更便于解释。而总的来说,非线性系统确认是否平坦以及确定系统的平坦输出都不是平凡的简单工作。而线性系统的话就可以使问题大大简化,只因平坦性和系统的能控性密切联系。
先考察SISO系统,根据定义(10.1),这个关系和能控标准型一致,于是可以确定平坦输出
(10.34)
(10.35)
显然所有状态变量
定理10.2 SISO线性系统的平坦输出
基于线性系统完全能控的假设,通过变换能确定系统的平坦输出。而其中变换向量
为能控矩阵逆矩阵最后一行元素,平坦输出和其导数的新坐标
以及
可以参数化表示原系统
(10.36)![]()
再看看MIMO的线性系统,可以类比SISO系统来选择各个解耦积分链子系统的第一个状态
定理10.3 MIMO线性系统的平坦输出
基于线性系统完全能控的假设,通过变换能确定系统的平坦输出。而其中变换向量
为简化能控矩阵逆矩阵第
行的元素,平坦输出和其导数的新坐标
以及
可以参数化表示原系统
(10.37)![]()
其中变换矩阵以及耦合矩阵
在之前第五篇中给出过。
对于MIMO系统的平坦输出,自然也不是唯一的,也可以选取其他坐标。
10.2.3 基于平坦系统的前馈控制
之前在10.2.1最后提到,平坦性特别适合设计逆系统来作为双自由度控制的前馈控制。所以现在由此考察一个之前出现过的工作点切换的任务
在SISO系统时,要给出这个前馈控制轨迹,根据定理10.2,需要设计一个
(10.38)
在平坦参数化系统中使用多项式形式来设计合适的
(10.39)
对于平坦的目标轨迹,在边界
在MIMO系统里,向量型的输入变量
(10.40)
并且,可以直接类比得出平坦目标输出参数描述的目标轨迹
(10.41)
平坦的目标轨迹,在边界
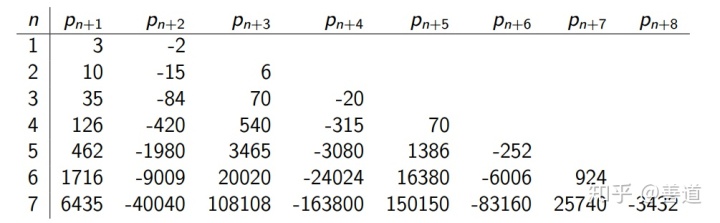
10.2.4 多项式描述的目标轨迹
一种惯用的设计目标轨迹的方法,就是运用稳态的约束条件来设计多项式的方法。为了简化问题,现在先只考虑一个标量的平坦输出
(10.42)
这种特殊结构很明显,在
(10.43)
下面表格罗列了对于微分阶数
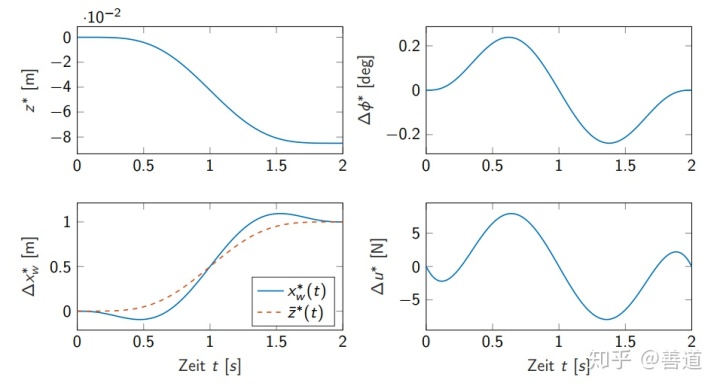
例10.2 倒立摆系统的多项式轨迹设计
考察之前的倒立摆系统,设计前馈控制以及目标轨迹,使之在
(10.44)

于是有平坦输出
(10.45)
所以目标轨迹
(10.46)
(10.47)
所以倒立摆单边的偏移量轨迹经过归一化后的平坦输出为
(10.48)
由于
10.2.5 对追踪轨迹的稳定反馈控制
在双自由度的控制环结构中,反馈控制是为了实现系统在目标轨迹
(10.49)
其中状态跟踪误差为
(10.50)
所以用来追踪轨迹的反馈控制器矩阵也能使用前面提到的控制器设计方法来设计,最终达成误差动态系统的渐进稳定。而如果遇到了恒定的扰动,则可以替代性使用PI控制器来实现。
在之前倒立摆小车的案例中,使用LQR控制器得到反馈控制增益,得到反馈控制,再获得双自由度的反馈部分的控制律,使倒立摆会在一个平衡位置处渐近稳定。
(10.51)
总结
至此,轨迹的追踪反馈控制就告一段落了。整个线性系统入门系列也就告一段落了,这个系列是我为了复习整理了现代控制技术理论的讲义,涵盖了线性控制系统的各个方面,林林总总合计十章,让我对状态变量描述的系统有了更深的认识,也希望能带给读者一些新的视角。
感谢本讲义作者Prof. Dr.-Ing. Knut Graichen以及感谢诸位读者。
参考文献:
[1]Regelungstechnik B (Zustandsraummethoden) (WS 2019), Prof. Dr.-Ing. Knut Graichen
Lehrstuhl für Regelungstechnik, Friedrich-Alexander-Universität Erlangen-Nürnberg















 1877
1877











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









