






作者:
韩斌 1,曹杰 1,2*,史牟丹 1,2,张镐宇 1,梁龙 1,张凯莉 1,2,熊凯鑫 1,郝群 1,2,3**1 北京理工大学光电学院,北京 100081;2 北京理工大学长三角研究院(嘉兴),浙江 嘉兴 314003;3 长春理工大学光电工程学院,吉林 长春 130022
摘要
激光雷达三维成像相比二维成像具有信息丰富、主动性好、抗干扰能力强等优势,已广泛应用于遥感侦察、无人驾驶 、航 空 航 天 等 多 领 域 。 近 年 来 ,激 光 雷 达 三 维 成 像 发 展 迅 速 ,一 方 面 ,以 APD 阵 列 器 件 为 典 型 核 心 器 件 的 制 造 能 力 增强 ,激 光 雷 达 的 成 像 效 率 得 到 明 显 提 升 ;另 一 方 面 ,随 着 三 维 成 像 方 法(扫 描/非 扫 描)的 不 断 改 进 ,其 综 合 性 能 也 得 到 突飞猛进的发展。通过总结现有激光雷达三维成像的研究现状,讨论现阶段其面临的问题与解决方法,为推进激光雷达应用提供支撑。
2 成像方法分类与现状
按 照 激 光 三 维 成 像 现 有 的 工 作 方 式 进 行 分 类 ,主要 包 括 扫 描 与 非 扫 描 两 类 方 法 ,如 图 2 所 示 。 扫 描 方法包括机械扫描、微机电扫描和电子扫描等;非扫描方法 包 括 闪 光 成 像 、单 像 素 成 像/鬼 成 像 等 。 不 仅 如 此 ,围绕实际应用,将扫描与非扫描相互结合,即可实现诸如多点扫描或小面阵扫描等方法。
2. 1 扫描式三维成像
2. 1. 1 光楔扫描

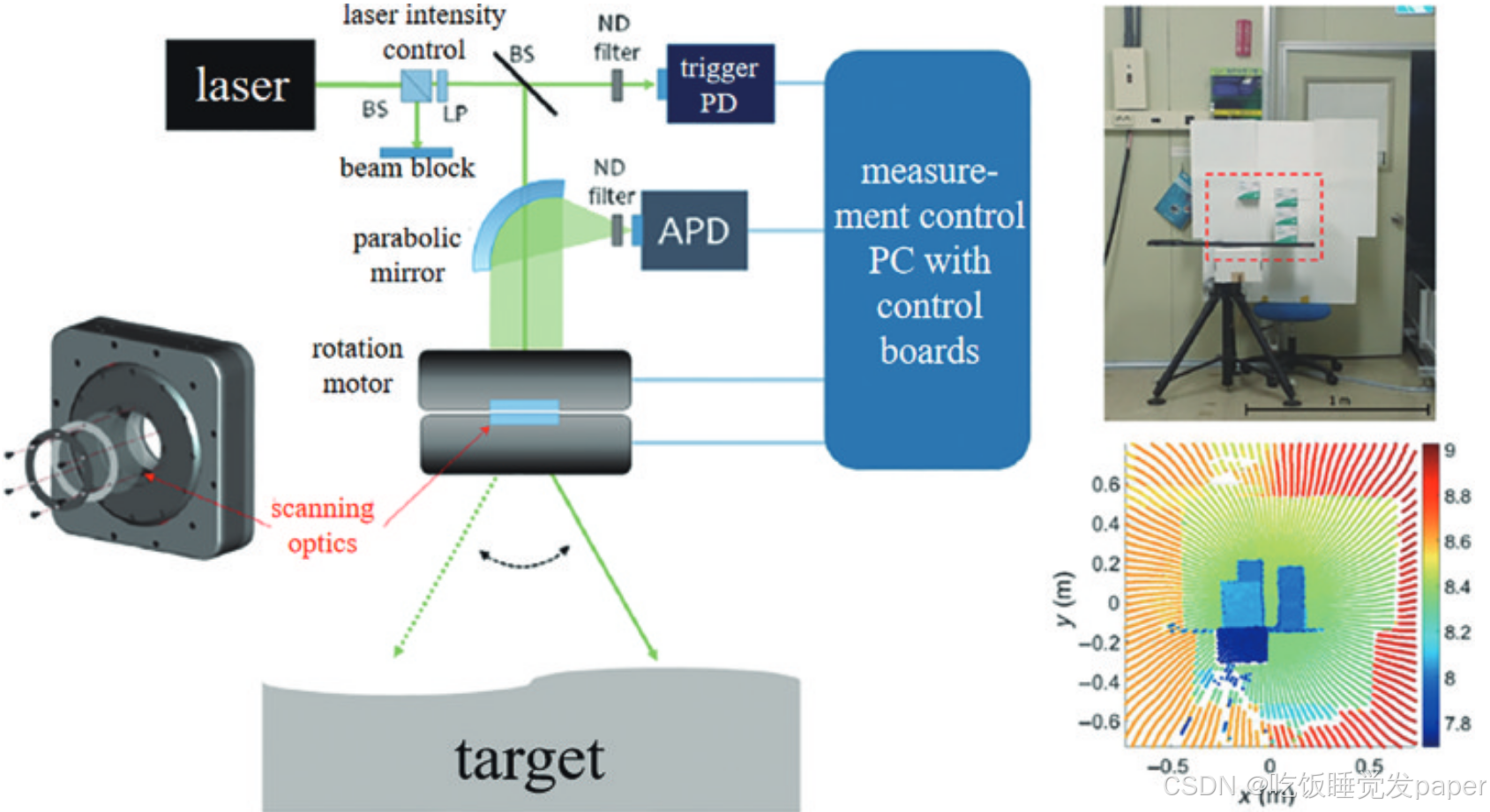
韩 国 标 准 与 科 学 研 究 院 Woo 等[26]提出一种轻量化扫描系统的基于飞行时间测量的三维轮廓 仪 ,如 图 4 所 示 ,构 建 了 菲 涅 耳 型 楔 镜 三 维 扫 描 模型 。 通 过 将 菲 涅 耳 型 楔 镜 与 飞 行 时 间 法(ToF)相 结合 ,该 模 型 实 现 了 测 量 误 差 低 于 1 mm@8 m 的 高 精 度三 维 重 建 。
2. 1. 2 转镜扫描
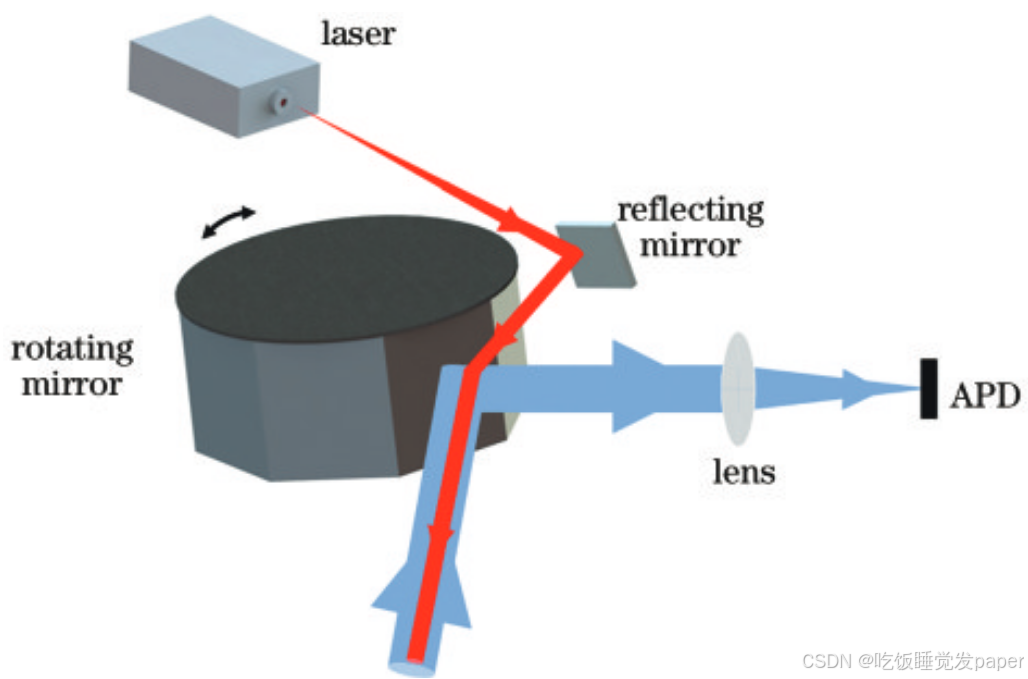
转 镜 扫 描 的 典 型 结 构 如 图 5 所 示 ,以 转 镜 作 为 扫描核心部件,通过(多面)转镜改变光束方向,具有扫描速率高、视场角度大、转动惯量较大的特点。转镜扫描激 光 三 维 成 像 属 于 反 射 式 扫 描 成 像 方 式 ,适 用 于 高 速扫 描 成 像[28-33]。 2022 年 ,武 汉 大 学 毛 庆 洲 团 队[28]提 出了 一 种 基 于 转 镜 的 扫 描 三 维 成 像 系 统 ,构 建 了 反 射 镜扫描的数学模型。结合转镜扫描三维成像系统与角度误差校准补偿技术,在 300 m 高度的飞行实验中,经内角 误 差 校 正 后 ,该 模 型 处 理 的 点 云 和 控 制 点 的 高 程 差的 标 准 差 仅 为 0. 024 m。
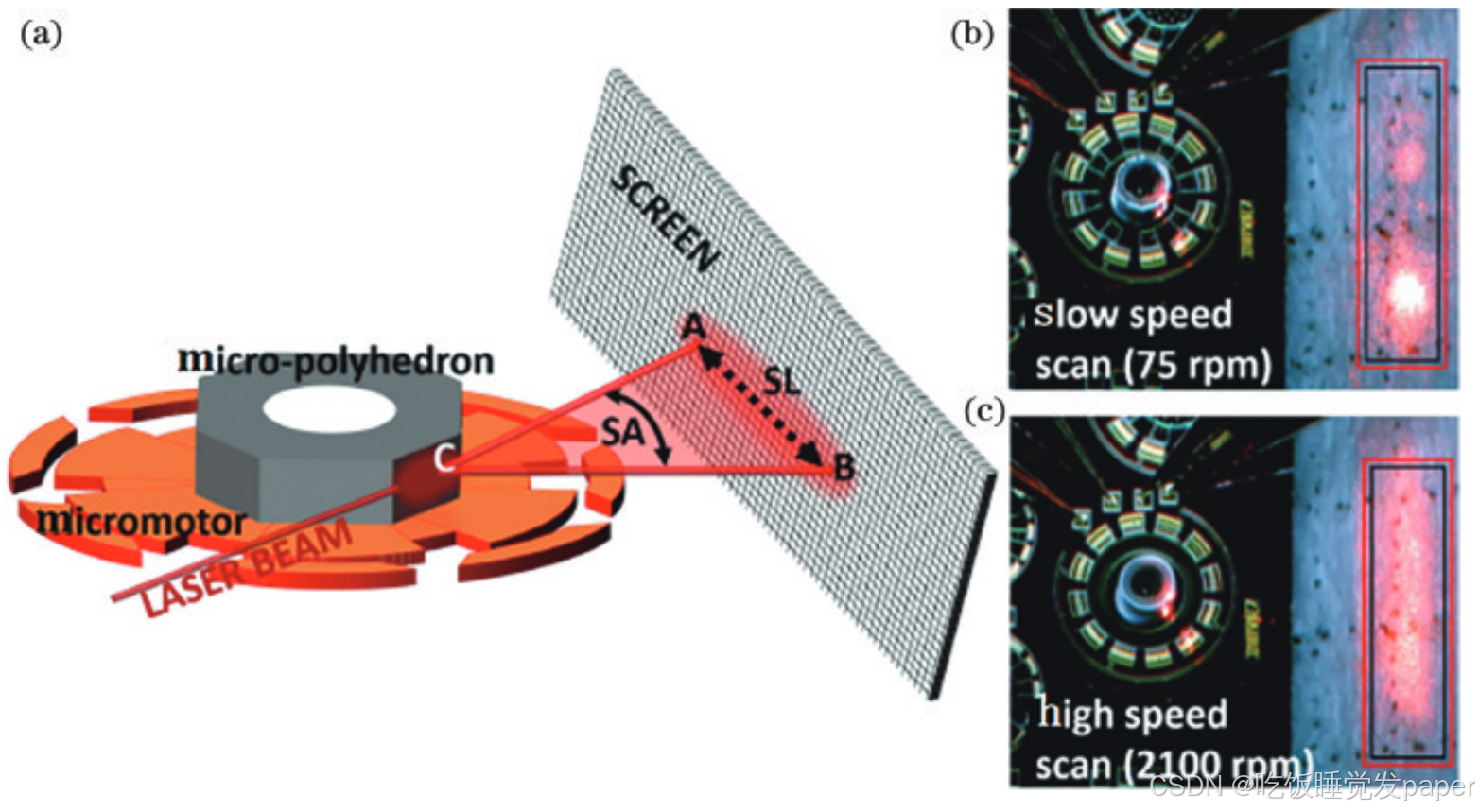
加 拿 大 魁 北 克 高 等 技 术 学 院Gour 等[29]提 出 一 种 基 于 静 电 可 变 电 容 微 电 机 的 旋 转微多边形扫描仪,如图 6 所示,构建了微型转镜扫描结构 模 型 ,通 过 将 中 空 的 微 型 多 面 体 反 射 镜 与 微 电 机 相结合 ,构建了尺寸为 1 mm×1 mm×1 mm 的微型扫描仪。该扫描仪在 57. 88°的角度范围内可以进行每分钟25200 次 线 扫 描 ,解 决 了 传 统 转 镜 转 动 惯 量 较 大 的问题。
2. 1. 3 振镜扫描
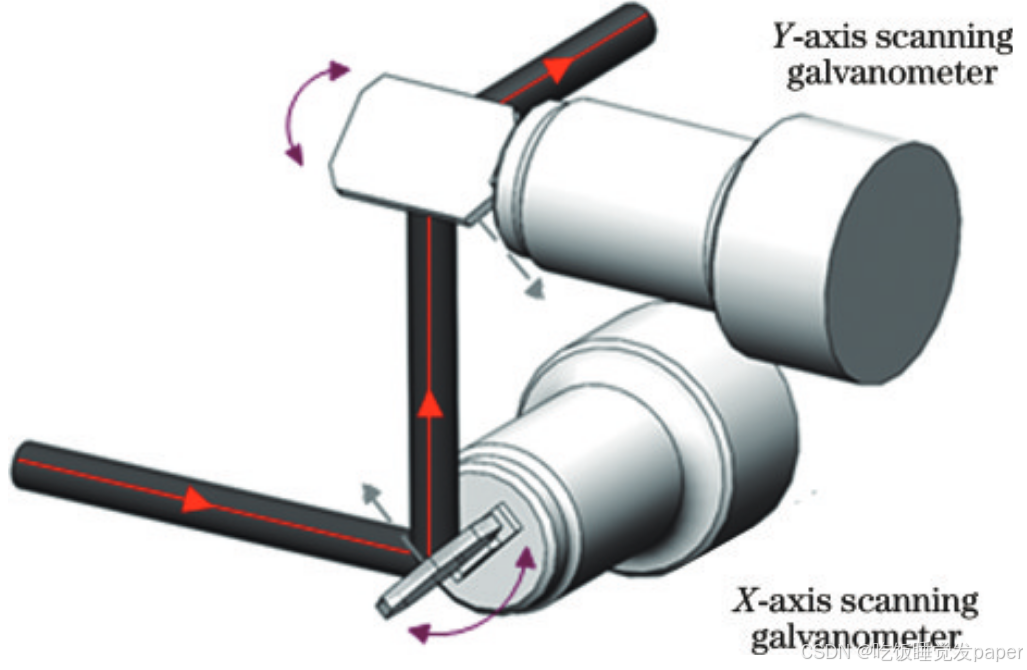
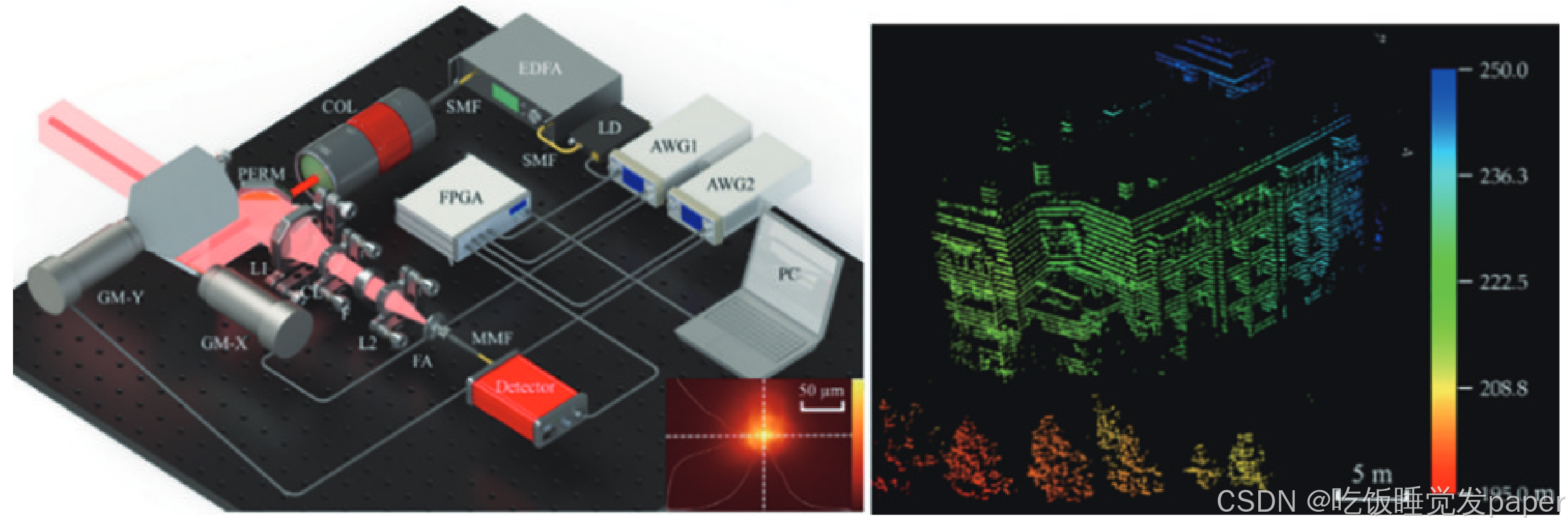
振镜扫描的典型结构如图 7 所示,通过利用 2 个转动 轴 线 正 交 的 振 镜 实 现 二 维 扫 描 ,该 方 法 具 有 扫 描 角度大、精度高、速度较快的特点。常见的振镜扫描激光三 维 成 像 属 于 反 射 式 扫 描 成 像 方 式 ,适 用 于 快 速 扫 描成 像[34-37]。 2013 年 ,英 国 赫 瑞 瓦 特 大 学 McCarthy 等[34]提 出 一 种 基 于 振 镜 扫 描 的 激 光 三 维 成 像 系 统 ,构建了基于振镜的单光子三维成像系统。该系统通过将振镜器件与单光子技术相结合,以 10 frame/s 的速度获得低特 征 物 体 的 厘 米 分 辨 率 深 度 图 像(1 km 内),解 决 了传 统 单 光 子 系 统 测 量 帧 率 低 、分 辨 率 差 的 问 题 。
在 此结 构 基 础 上 ,华 东 师 范 大 学 Shen 等[35]提 出 一 种 具 有1550 nm 波 长 双 重 复 频 率 激 光 脉 冲 的 自 门 控 单 光 子成 像 激 光 雷 达 ,如 图 8 所 示 。 通 过 使 用 500 kHz 和600 kHz 的 双 重 复 频 率 激 光 脉 冲 ,该 系 统 的 最 大 无 模糊 范 围 从 250 m 扩 大 到 1500 m,并 且 通 过 去 除 门 控 外噪声,有效点云生成率高达 1. 3×105 点/s,解决了传统单 光 子 系 统 点 云 生 成 速 率 低 、测 量 距 离 短 的 问 题 。 在振 镜 扫 描 精 度 上 ,深 圳 大 学 Huang 等[38]提 出 了 一 种 高精度、简单的激光扫描系统标定方法,通过计算乘积矩阵 和 旋 转 角 度 与 电 压 的 比 值 因 子 就 可 以 实 现 三 维 重建。实验结果表明,该方法精度较高,可以实现对复杂表 面 物 体 的 三 维 重 建 ,适 用 于 工 业 场 景 的 大 视 场 三 维测量系统。
2. 1. 4 MEMS 扫描
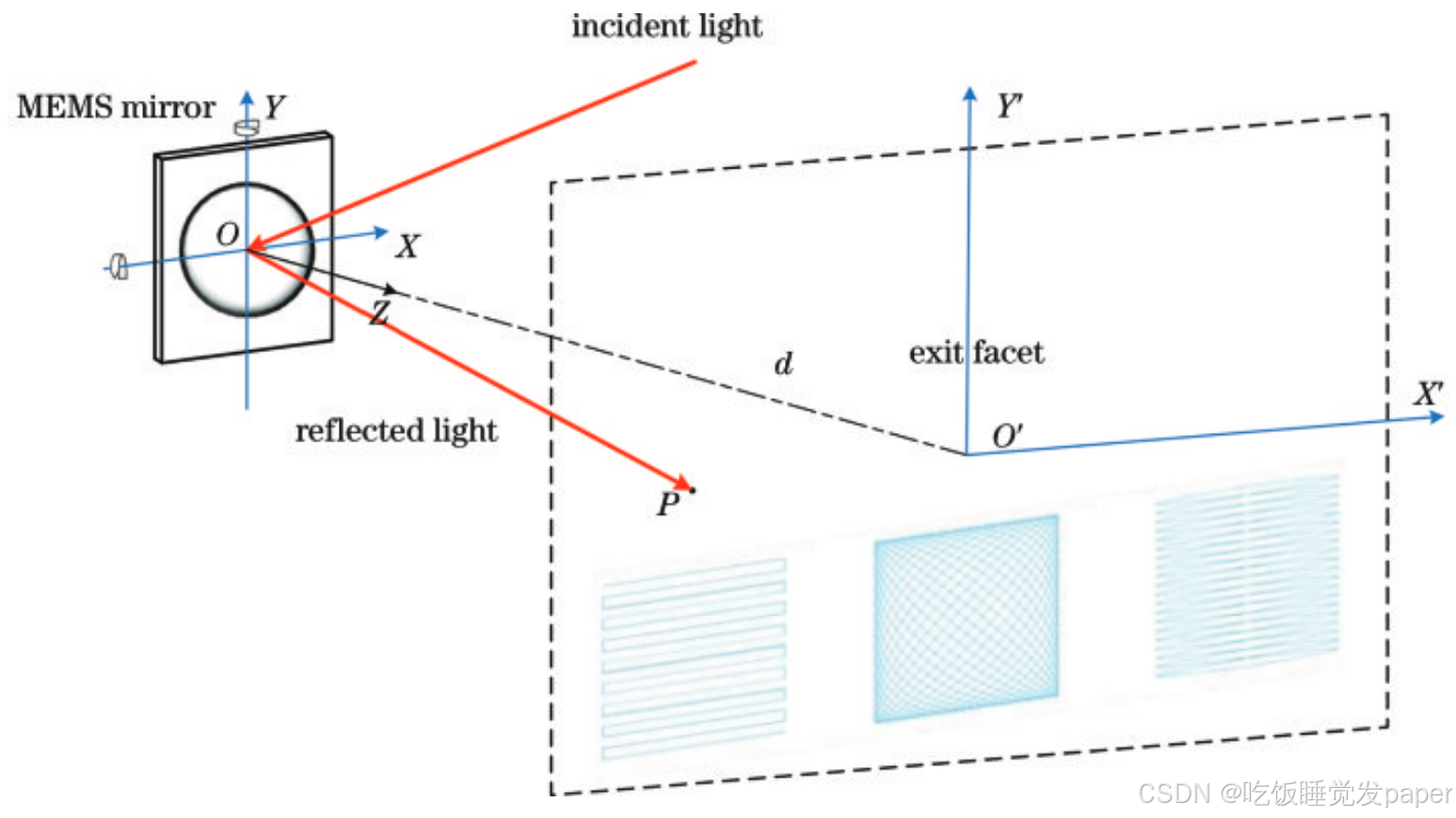
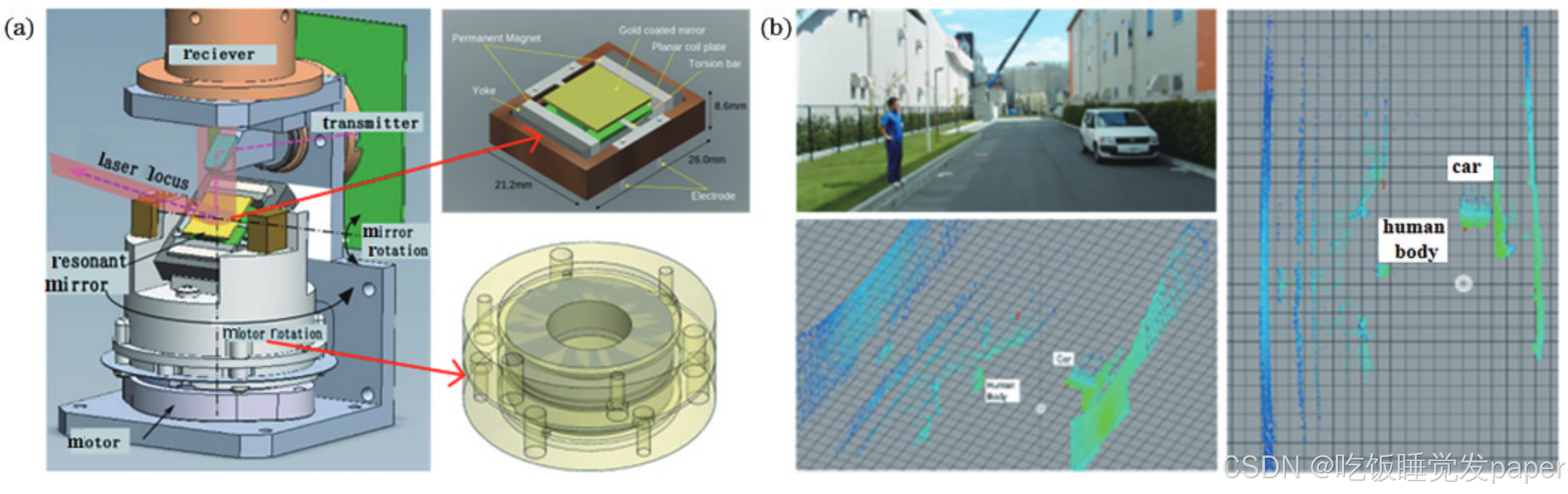
Micro electro mechanical systems (MEMS)扫 描 的典 型 结 构 如 图 9 所 示 ,以 MEMS 反 射 镜 作 为 核 心 扫 描部 件 ,通 过 控 制 其 一 维/二 维 摆 动 实 现 光 束 偏 转 ,该 方法 具 有 体 积 小 、功 耗 低 、扫 描 频 率 高 和 响 应 速 度 快 的特点。
2009 年 ,美 国 陆 军 研 究 实 验 室(ARL)开 展 了MEMS 扫 描 成 像 的 研 究[39-41],提 出 了 一 种 面 向 机 器 人的 小 型 化 、低 功 耗 的 MEMS 扫 描 激 光 雷 达 成 像 系 统 ,如图 10 所示。该系统采用非同轴光路,以一个直径为8 mm 的 双 轴 MEMS 反 射 镜 作 为 扫 描 机 构 ,配 合 高 重复频率发射的激光脉冲(重复频率为 200~400 kHz,波长 为 1550 nm)和 单 元 InGaAs 探 测 器 ,实 现 了 帧 速 率为 5~6 Hz、视 场 范 围 达 60°(水 平)×30°(竖 直)、距 离为 20 m、分 辨 率 为 40 cm、功 耗 为 18 W 的 激 光 雷 达 三维 成 像 系 统 ,该 系 统 已 应 用 在 美 国 陆 军 PackBot 系 列机 器 人 。 日 本 Hokuyo 公 司[42]提 出 了 一 种 基 于 单 轴MEMS 镜实现三维扫描的方法,该方法采用同轴光路设 计 ,将 单 轴 MEMS 谐 振 镜 和 驱 动 电 机 旋 转 相 结 合 ,在竖直方向上使用 MEMS 镜实现扫描,扫描频率可达400 Hz,然后在水平方向上使用电机来旋转,控制电机和 MEMS 镜 同 步 扫 描 以 实 现 三 维 扫 描 。 样 机 尺 寸 为87 mm×118 mm×85 mm,帧 率 可 达 20 frame/s,扫 描范 围 达 240°(水 平)×40°(竖 直),最 大 测 距 范 围 达30 m。2019 年,韩国科学技术学院相关研究人员[43]提出 一 种 具 有 高 分 辨 率 、高 帧 率 的 使 用 李 萨 如 扫 描 模 式的 静 电 MEMS 镜 。 该 MEMS 镜 在 x 和 y 方 向 上 的 谐振扫描频率分别为 5402 Hz 和 6702 Hz,扫描视场达到了 20°×18°,能 以 256×256 像 素 提 供 每 秒 5050 帧 的 图像,适用于各种高分辨率、高帧率的激光扫描成像和显示应用。
我国也有研究 MEMS 扫描的激光雷达的案例,尤其 是 在 车 载 应 用 方 面[44]。 2020 年 ,哈 尔 滨 工 业 大 学 的Li 等[45]通过优化 PID 控制算法,使 MEMS 镜能持续以最大 频 率 800 Hz 振 动 工 作 。 结 合 该 方 法 的 MEMS 激光 雷 达 样 机 拥 有 20° 的 扫 描 视 场 角 ,能 以 10 frame/s的 速 度 对 40 m 外 的 目 标 物 进 行 清 晰 成 像 ,与 传 统 的64 线激光雷达相比,分辨率提高 15 倍的同时设备体积大大减小。
2. 1. 5 光学相控阵(OPA)
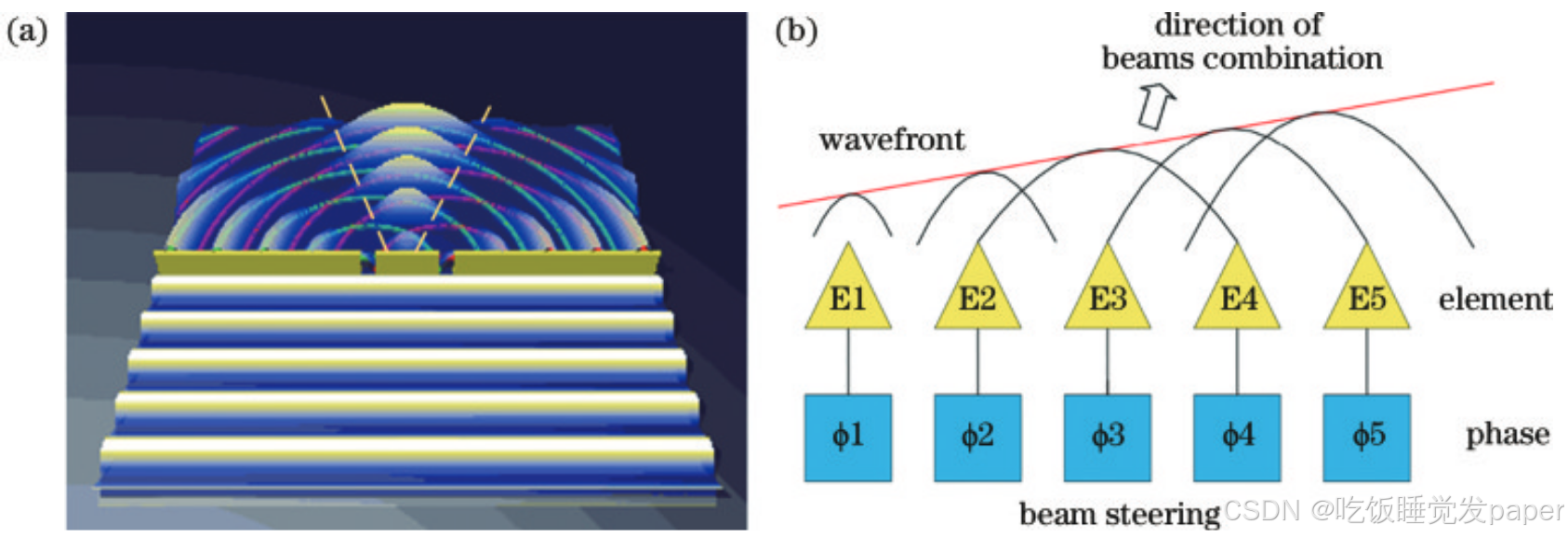
光学相控阵基本原理如图 11 所示,由一光源发射出 光 波 ,经 过 双 缝 的 光 束 在 远 场 合 成 ,如 图 11(a)所示 。 利 用 此 原 理 ,通 过 控 制 发 射 单 元 的 相 位 产 生 固 定相 位 差 ,如 图 11(b)所 示 ,可 以 使 合 成 方 向 按 照 一 定 规律偏转。
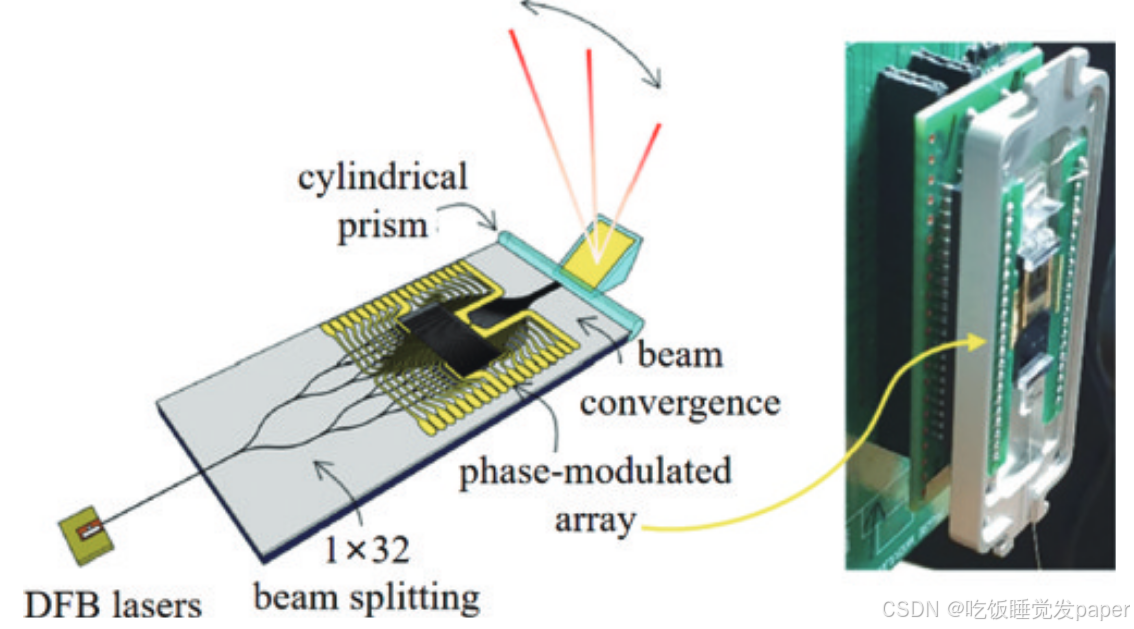
2022 年,Jin 等[52]在一维光 波 导 相 控 阵 的 基 础 上 加 入 了 振 镜 ,作 为 另 一 维 度 的光 束 偏 转 手 段 ,如 图 12 所 示 ,使 得 系 统 从 32 通 道 增 加到 1024 通道,以实现更加精确的光束指向控制。
2022 年 ,北 京 理 工 大 学 曹 杰 团 队[56]通 过 利 用 液 晶 相 控阵技术,结合仿生视网膜成像的思想,实现了具有空间变分辨率的液晶相控阵仿生视网膜扫描方法。该方法在实现环形扫描的同时,对扫描角度进行了放大,同时抑 制 了 中 央 亮 斑 ,使 得 液 晶 相 控 阵 的 光 束 扫 描 可 以 和激 光 雷 达 更 加 契 合 。2023 年,丹麦科技大学相关研究团队[58]为了兼顾光学相控阵的调制速度、插入损耗和占用空间等,通 过 实 验 提 出 并 演 示 了 圆 形 移 相 器 ,其 在 功 耗(3. 1 mW/π)、调 制 速 度(34 kHz)、插 入 损 耗(0. 6 dB)和 占 位 面 积(42 μm×42 μm)方 面 实 现 了 良 好 的 平 衡 。此外,移相器在制造上对波导宽度、节距和加热器宽度具有鲁棒性,非常适合大规模集成。
2. 1. 6 选通成像
选 通 成 像 以 ICCD 阵 列 器 件 为 核 心 探 测 器 件 ,通过距离门形成不同时刻的纵向切片(时域)。与上述扫描方式不同,选通成像在空域上并不扫描,在时域上进行 扫 描 形 成 三 维 成 像 ,具 有 较 高 的 抗 后 向 散 射 能 力 和分辨率。中国人民解放军陆军炮兵防空学院胡春生教授团队[59]提出了一种结合阈值法和互相关法的高精度三维重建算法。采用阈值法消除被测灰度曲线中的零点 ,利 用 每 个 像 素 点 处 相 关 峰 对 应 的 时 延 计 算 每 个 像素 点 处 的 距 离 值 ,根 据 成 像 系 统 参 数 计 算 出 各 像 素 点的三维坐标,对切片图像进行处理,得到三维图像。该方法可以高精度地凸显目标表面凹凸细节,如图 13 所示,从而实现对远程目标的高精度三维重建。
2021 年 ,美 国 普 林 斯 顿 大 学 Julca-Aguilar 等[60]提出 了 一 种 新 的 深 度 检 测 器 架 构(Gated3D),如 图 14 所示 ,选 通 相 机 用 粗 时 间 分 辨 率 来 权 衡 密 集 的 空 间 分 辨率 和 信 噪 比 。 该 方 法 能 够 以 超 过 80 m 的 高 精 度 检 测目 标 ,提 供 了 一 个 新 的 3D 选 通 数 据 集 。 2021 年 ,哈 尔滨工业技术学院威海海洋光电设备研究所[61]利用相邻帧 差(AFD)方 法 来 重 建 目 标 的 三 维 图 像 。 该 方 法 中 ,目标的范围信息是通过对 ICCD 的相邻帧的强度差进行 阈 值 化 得 到 的 。 采 用 基 于 AFD 方 法 的 距 离 门 控 闪光成像激光雷达对 2. 4 km 处的目标进行探测,分别在距 离 门 的 前 边 缘 和 后 边 缘 重 建 目 标 的 实 时 三 维 图 像 。与 其 他 方 法 相 比 ,该 方 法 在 距 离 门 与 激 光 脉 冲 宽 度 之间 没 有 严 格 的 相 关 性 ,具 有 成 像 速 度 快 、成 像 范 围 大 、数据处理简单等优点。
3 现状瓶颈与讨论
从 目 前 激 光 雷 达 三 维 成 像 的 研 究 现 状 可 以 看 出 :一 方 面 ,三 维 成 像 分 辨 率 仍 受 限 于 APD 阵 列 器 件 ,高灵敏 APD 阵列是获取目标三维成像的关键器件之一,大 面 阵 APD 阵 列 的 制 造 对 于 电 子 制 造 工 艺 仍 然 是 个严 峻 的 挑 战 ,据 公 开 资 料 ,目 前 APD 阵 列 为 320×256[70],但 其 分 辨 率 明 显 低 于 现 有 二 维 图 像 传 感 器(CCD、CMOS);另 一 方 面 ,对 于 现 有 激 光 三 维 成 像 方法,无论是基于扫描式的成像,还是基于非扫描式的成像 ,大 视 场 、高 分 辨 、实 时 性 仍 是 现 有 三 维 成 像 方 法 难以调和的矛盾。比如:对于扫描式成像,采用更密集的扫 描 点 云 可 获 得 更 高 的 分 辨 率 ,但 数 据 量 将 会 限 制 实时性;非扫描成像尽管效率更高,但现有阵列规模的点云过于稀疏,不适用于大视场成像。围绕上述两方面,国 内 外 研 究 学 者 从 实 际 需 求 出 发 ,分 别 探 讨 了 以 单 像素探测器为核心器件的关联成像/鬼成像方法,开展了具有大视场、高分辨、实时性的平衡成像方法的研究。
3. 1 突破器件束缚的三维鬼成像/单像素成像技术
3. 2 非均匀分辨率成像方法
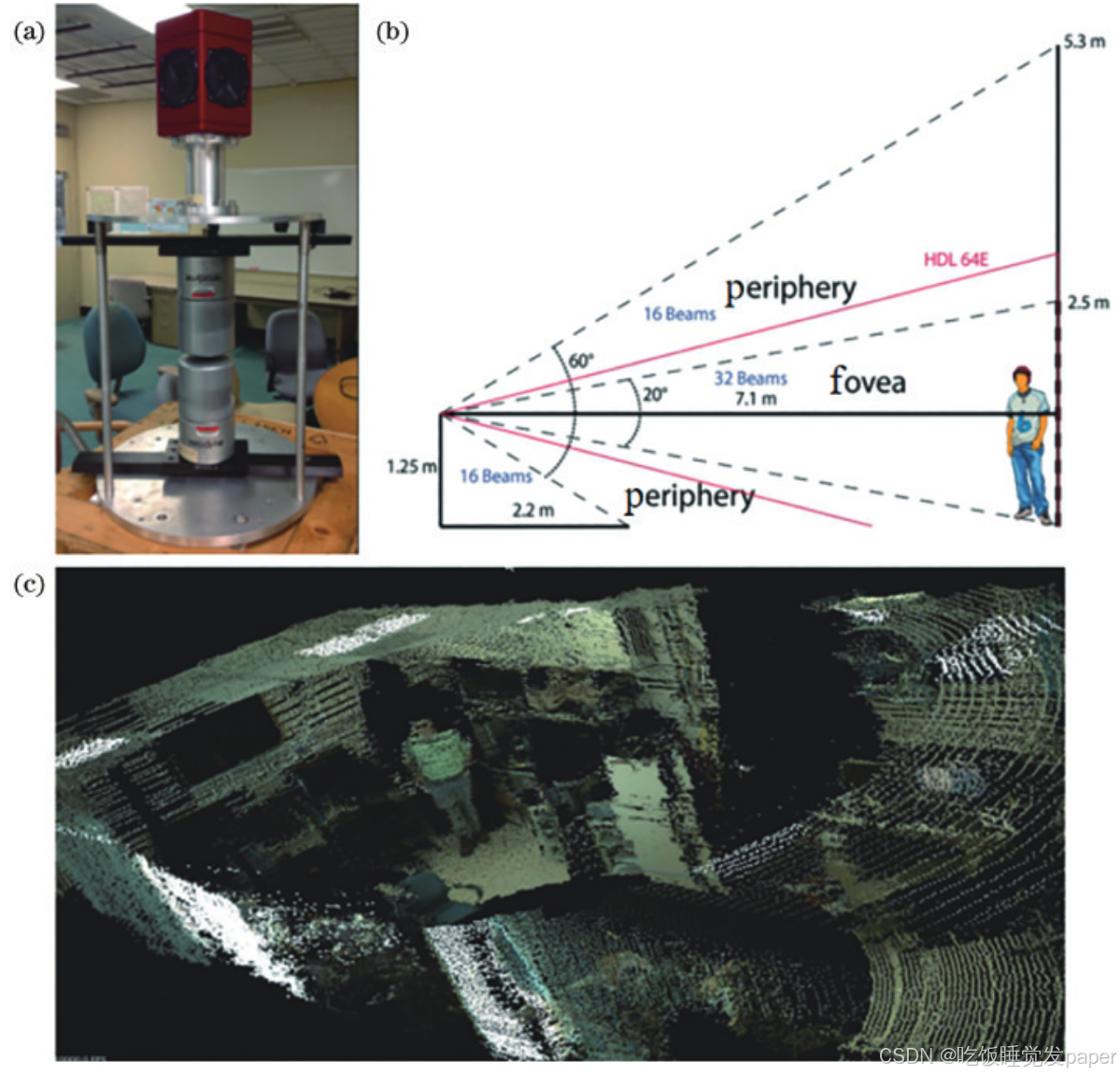
2009 年 ,北 京 航 空 航 天 大学 陈 伟 海 等[83]针 对 目 前 国 内 外 应 用 于 移 动 机 器 人 的三 维 激 光 扫 描 系 统 存 在 的 扫 描 效 率 问 题 ,提 出 了 一 种仿 人 眼 功 能 的 三 维 激 光 扫 描 算 法 。 该 算 法 模 仿 人 类眼 睛 的 扫 描 功 能 ,对 陌 生 环 境 进 行 分 步 扫 描 ,根 据 当前 的 扫 描 信 息 ,在 线 规 划 出 下 一 步 的 扫 描 规 律 ,以 减少 无 用 信 息 的 获 取 ;采 用 分 步 插 补 定 位 的 方 法 来 弥 补分 步 扫 描 带 来 的 时 间 消 耗 ,从 而 提 高 了 扫 描 系 统 的 效率 。 2015 年 ,Mundhenk 等[84]研 制 了 一 种 周 视 非 均 匀分 辨 率 彩 色 激 光 雷 达 ,如 图 21 所 示 ,该 系 统 采 用 了 周视 全 景 相 机 与 激 光 雷 达 点 云 相 融 合 ,通 过 16 线 激 光雷 达 与 32 线 激 光 雷 达 相 互 配 合 ,实 现 了 60°视 场 内 20°的 更 高 分 辨 率 成 像 ,达 到 了 对 重 点 区 域 进 行 高 分 辨 成像 的 目 的 。
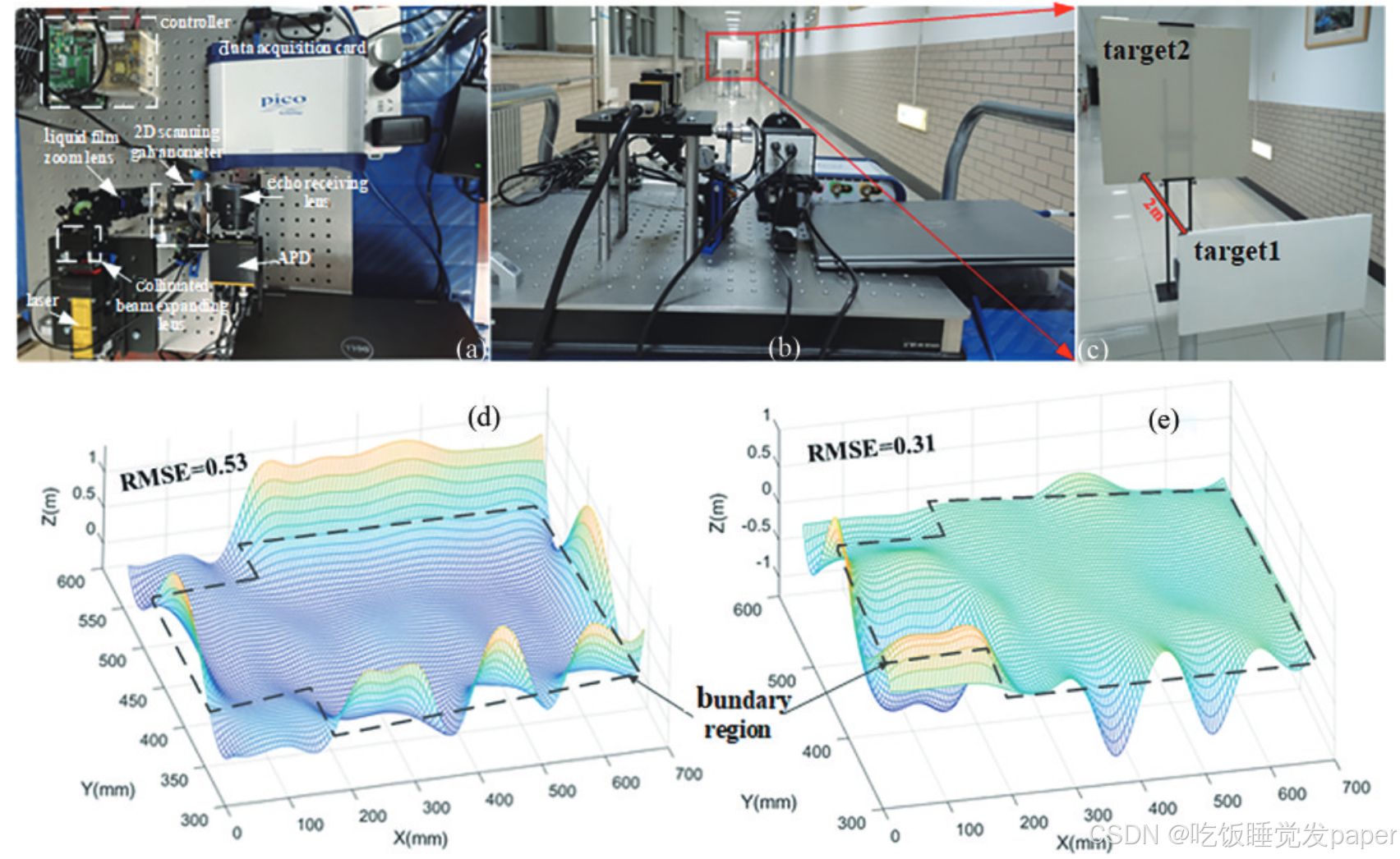
2016 年南京理工大学陈钱团队[85]通过将盖革模式雪 崩 光 电 二 极 管 与 时 间 相 关 单 光 子 计 数 技 术 相 结 合 ,开发了自适应扫描探测三维成像激光雷达。该激光雷达 利 用 背 景 与 目 标 在 深 度 域 中 的 不 连 续 性 来 自 适 应 、快 速 获 取 目 标 轮 廓 信 息 ,通 过 使 用 自 适 应 扫 描 来 定 位深 度 边 界 附 近 的 区 域 ,并 对 这 些 区 域 执 行 精 细 扫 描 。与 传 统 的 高 分 辨 率 扫 描 激 光 雷 达 相 比 ,其 仅 对 特 定 区域 进 行 精 细 扫 描 ,在 保 证 目 标 深 度 信 息 恢 复 精 度 不 变的同时 ,减少了数据采集时间。该方法采用 9559 次扫描 ,实 现 了 目 标 区 域 256×256 像 素 的 深 度 图 像 重 建 ,在 不 引 起 目 标 轮 廓 畸 变 的 情 况 下 ,数 据 采 集 时 间 缩 短了 85%。2020 年,美国加利福尼亚大学的 Jiang 等[86]将时 间 延 展 技 术 与 光 谱 扫 描 相 结 合 并 应 用 于 激 光 雷 达 ,实验结果如图 22 所示,可实现对任意区域的高密集扫描,该方法为无惯性扫描,速率可达 1 MHz,最大探测距离为 5 m,视场为 7°。图 22(c)(d)与图 22(e)(f)为对不同区域进行密集扫描的结果,展示了一种面向三维成像应用解决大数据与实时性困难的方法。北京理工大学Cao 等[87-89]长期从事非均匀分辨率激光成像探测研究,提出了变分辨率激光扫描三维成像方法,实验与结果如图 23 所示,在进行目标深度图像重建时对目标边界区域的像素进行重新分配,从而提高对两个目标边沿区域的重建精度,在采样比为均匀采样的 50% 的情况下,重建深度图像的均方根误差由 0. 53 m 降低至 0. 31 m。
4 总 结
目 前 ,激 光 雷 达 三 维 成 像 正 朝 着 大 视 场 、高 分 辨 、高 精 度 、实 时 性 、模 块 化 、智 能 化 的 方 向 发 展 。 通 过 对现 有 激 光 雷 达 三 维 成 像 方 法 进 行 分 类 归 纳 ,总 结 激 光雷 达 三 维 成 像 的 关 键 技 术 与 前 沿 动 态 ,进 一 步 讨 论 了国内外研究者对激光雷达三维成像面临的两个关键问题的科研攻关情况。一方面,针对核心探测器件问题,国 内 外 学 者 通 过 研 究 突 破 器 件 束 缚 的 三 维 鬼 成 像 技术 ,逐 步 实 现 了 从 光 源 调 制 到 图 像 重 构 算 法 的 性 能 提升;另一方面,面向"大视场、小目标"的典型应用场景,通 过 研 究 非 均 匀 分 辨 率 成 像 方 法 ,可 以 同 时 兼 顾 大 视场 、高 分 辨 和 实 时 性 ,并 将 鬼 成 像 与 变 分 辨 率 成 像 结合 ,提 升 了 三 维 成 像 的 综 合 性 能 。 总 结 内 容 将 为 进 一步开展高性能激光雷达三维成像奠定基础。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









