





一、元器件介绍
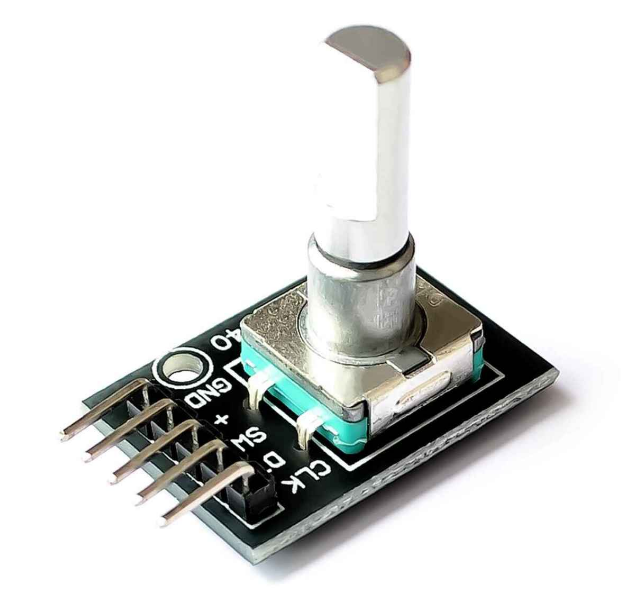
旋转编码器(增量式编码器)可通过旋转可以计数正方向和反方向转动过程中输出脉冲的次数,旋转计数不像电位计,这种转动计数是没有限制的。配合旋转编码器上的按键,可以复位到初始状态,即从0开始计数。旋转编码器目前被广泛的应用在数控机床、印刷设备、包装机械、输送带、电梯、机器人、风力发电、起重机、家用电器等领域,主要用于频率调节、速度调节、高度调节、温度调节及音量调节等的参数控制。
- 旋转编码器是一种位置传感器,它将旋钮的角位置(旋转)转换为输出信号,可用于确定旋钮的转动方向。
- 旋转编码器分为绝对式和增量式两种。绝对编码器报告旋钮的精确位置(以度为单位),而增量编码器报告轴移动的增量数。
- 旋转编码器是电位器的现代数字等效物,并且用途更广泛。旋转编码器可以不停地旋转360°,而电位器只能旋转3/4圈。电位器用于需要知道旋钮准确位置的情况。
1、旋转编码器如何工作?
编码器内部有一个开槽圆盘,连接到公共接地引脚 C。它还具有两个接触针 A 和 B,如下所示。
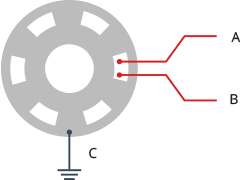
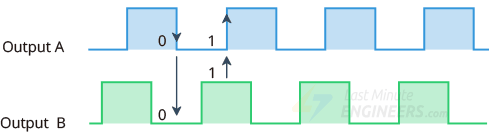
当您转动旋钮时,A 和 B 按照特定顺序与公共接地引脚 C 接触,具体顺序取决于转动旋钮的方向。当它们与公共地接触时,会产生两个信号。这些信号存在 90° 异相,因为一个引脚先于另一个引脚接触公共地。它被称为正交编码。
当顺时针旋转旋钮时,A 引脚先于 B 引脚接地。当逆时针旋转旋钮时,B 引脚先于 A 引脚接地。通过监控每个引脚何时连接或断开接地,我们可以确定旋钮旋转的方向。这可以通过简单地观察 A 的状态改变时 B 的状态来完成。
当A改变状态时:
如果 B != A,则顺时针转动旋钮。
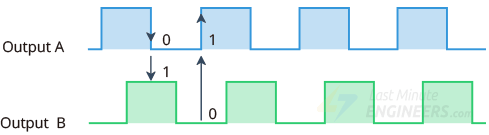
如果 B = A,则逆时针转动旋钮。
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。原文链接:
2、针脚用途
编号 | 名称 | 功能 |
1 | CLK | 脉冲信号输出A |
2 | DT | 脉冲信号输出B |
3 | SW | 中间按键状态 |
4 | + | 电源正极 |
5 | GND | 电源负极 |
二、示例代码
1、代码:
元器件的针脚 | ESP32模块的针脚 |
CLK;脉冲信号输出A | IO23 |
DT;脉冲信号输出B | IO22 |
SW;中间按键状态 | IO21 |
+;电源正极 | 5V |
GND;电源负极 | GND |

参照代码:(修改了点),修改后封装的的方法如下:
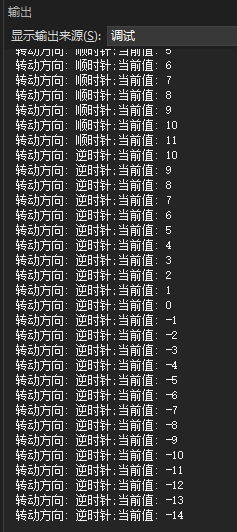
2、结果:
作者:꧁执笔小白꧂
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









