






Pytorch深度学习框架60天进阶学习计划 - 第55天:3D视觉基础(一)
今天我们将踏入3D视觉的精彩领域,深入研究点云特征提取网络,对比不同的处理方法,并推导旋转等变卷积的数学原理。系好安全带,我们要开始一段从点到面、从静态到动态的3D视觉之旅了!*
第一部分:点云特征提取基础与方法对比
1. 3D点云数据表示与挑战
3D点云是表示三维物体或场景最原始、最直接的方式之一。它由一系列点组成,每个点都有其在3D空间中的坐标,通常表示为 (x, y, z),有些还包含颜色、反射强度等额外属性。
点云数据通常来源于:
- 激光雷达 (LiDAR) 扫描
- RGB-D相机(如Kinect)
- 多视角立体重建
- 计算机辅助设计(CAD)模型转换
1.1 点云数据的特性与挑战
处理点云数据面临几个独特的挑战:
| 特性 | 描述 | 挑战 |
|---|---|---|
| 无序性 | 点云中的点没有固定顺序 | 需要设计排列不变的算法 |
| 不规则性 | 点分布不均匀,密度可变 | 难以应用传统的卷积操作 |
| 刚性变换 | 旋转、平移不应改变物体识别结果 | 需要旋转平移不变性 |
| 规模多变 | 点数量从数百到数百万不等 | 计算复杂度难以控制 |
| 局部结构 | 点与近邻点构成局部几何结构 | 需有效捕获局部特征 |
1.2 点云处理方法的分类
针对这些挑战,研究者提出了多种处理方法,大致可分为三类:
- 体素化方法:将点云转换为规则的3D网格
- 原始点云方法:直接处理无序点集
- 混合方法:结合体素和原始点云的优势
2. 体素化方法详解
体素化(Voxelization)是将不规则的点云转换为规则3D网格的过程,类似于将2D图像像素化。
2.1 体素化的基本原理
体素化的基本流程如下:
- 确定体素化范围和分辨率
- 将3D空间划分为规则网格(体素)
- 对每个体素,统计落入其中的点的某种特征(如点数、平均值等)
- 生成结构化的3D体素网格
2.2 代表性体素化网络:VoxNet
VoxNet是最早的体素化深度学习方法之一,它使用3D卷积神经网络处理体素化点云。
import torch
import torch.nn as nn
import torch.nn.functional as F
class VoxNet(nn.Module):
def __init__(self, num_classes=10, input_size=32):
super(VoxNet, self).__init__()
# 3D卷积层
self.conv1 = nn.Conv3d(1, 32, kernel_size=5, stride=2)
self.bn1 = nn.BatchNorm3d(32)
self.conv2 = nn.Conv3d(32, 64, kernel_size=3, stride=1)
self.bn2 = nn.BatchNorm3d(64)
# 根据输入大小和卷积参数计算全连接层输入尺寸
# 对于32^3输入,经过第一个卷积层(k=5,s=2)后变为14^3
# 经过第二个卷积层(k=3,s=1)后变为12^3
fc_size = 64 * 12 * 12 * 12 if input_size == 32 else 64 * 6 * 6 * 6
# 全连接层
self.fc1 = nn.Linear(fc_size, 128)
self.fc2 = nn.Linear(128, num_classes)
def forward(self, x):
# 输入 x 的形状: [batch_size, 1, D, H, W]
# 3D卷积层 1
x = F.relu(self.bn1(self.conv1(x)))
# 3D卷积层 2
x = F.relu(self.bn2(self.conv2(x)))
# 展平
x = x.view(x.size(0), -1)
# 全连接层
x = F.relu(self.fc1(x))
x = F.dropout(x, p=0.5, training=self.training)
x = self.fc2(x)
return x
# 创建模型实例
model = VoxNet(num_classes=10, input_size=32)
# 测试前向传播
batch_size = 2
voxel_data = torch.rand(batch_size, 1, 32, 32, 32) # 随机生成32^3的体素数据
output = model(voxel_data)
print(f"Input shape: {voxel_data.shape}")
print(f"Output shape: {output.shape}")
2.3 点云体素化实现
下面是一个将点云转换为体素网格的简单实现:
import numpy as np
import torch
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
def voxelize_point_cloud(points, voxel_size=1.0, grid_size=(32, 32, 32)):
"""
将点云转换为体素网格
参数:
- points: Nx3 的numpy数组,表示点云
- voxel_size: 体素的边长
- grid_size: 网格尺寸 (D, H, W)
返回:
- voxel_grid: 3D体素网格,形状为grid_size
"""
# 初始化空体素网格
voxel_grid = np.zeros(grid_size, dtype=np.float32)
# 计算点云的边界框
min_bound = np.min(points, axis=0)
max_bound = np.max(points, axis=0)
# 确保边界框至少与网格一样大
diff = max_bound - min_bound
max_diff = np.max(diff)
if max_diff < voxel_size * max(grid_size):
# 扩大边界框
center = (min_bound + max_bound) / 2
min_bound = center - max(grid_size) * voxel_size / 2
max_bound = center + max(grid_size) * voxel_size / 2
# 将每个点映射到体素
grid_indices = np.floor((points - min_bound) / voxel_size).astype(int)
# 过滤出在网格范围内的点
valid_indices = np.all((grid_indices >= 0) &
(grid_indices < np.array(grid_size)), axis=1)
valid_grid_indices = grid_indices[valid_indices]
# 统计每个体素中的点数
for idx in valid_grid_indices:
x, y, z = idx
voxel_grid[x, y, z] += 1
# 归一化体素值
if np.max(voxel_grid) > 0:
voxel_grid = voxel_grid / np.max(voxel_grid)
return voxel_grid, min_bound, max_bound
# 生成一个简单的球形点云作为示例
def generate_sphere_point_cloud(num_points=1000, radius=1.0, noise=0.05):
# 随机生成球面上的点
theta = np.random.uniform(0, 2*np.pi, num_points)
phi = np.random.uniform(0, np.pi, num_points)
x = radius * np.sin(phi) * np.cos(theta)
y = radius * np.sin(phi) * np.sin(theta)
z = radius * np.cos(phi)
points = np.stack([x, y, z], axis=1)
# 添加一些噪声
noise_vector = np.random.normal(0, noise, points.shape)
points = points + noise_vector
return points
# 生成点云样本
sphere_points = generate_sphere_point_cloud(num_points=2000, radius=10.0)
# 体素化点云
voxel_size = 1.0
grid_size = (32, 32, 32)
voxel_grid, min_bound, max_bound = voxelize_point_cloud(sphere_points, voxel_size, grid_size)
# 将体素网格转换为PyTorch张量,用于模型输入
voxel_tensor = torch.from_numpy(voxel_grid).float().unsqueeze(0).unsqueeze(0) # [1, 1, 32, 32, 32]
# 可视化原始点云和体素化结果
fig = plt.figure(figsize=(15, 7))
# 原始点云
ax1 = fig.add_subplot(121, projection='3d')
ax1.scatter(sphere_points[:, 0], sphere_points[:, 1], sphere_points[:, 2], c='b', s=1)
ax1.set_title('原始点云')
ax1.set_xlabel('X轴')
ax1.set_ylabel('Y轴')
ax1.set_zlabel('Z轴')
ax1.set_xlim(min_bound[0], max_bound[0])
ax1.set_ylim(min_bound[1], max_bound[1])
ax1.set_zlim(min_bound[2], max_bound[2])
# 体素化结果(只显示非零体素)
ax2 = fig.add_subplot(122, projection='3d')
voxel_positions = np.where(voxel_grid > 0)
values = voxel_grid[voxel_positions]
ax2.scatter(voxel_positions[0], voxel_positions[1], voxel_positions[2],
c=values, cmap='viridis', s=100*values)
ax2.set_title('体素化结果')
ax2.set_xlabel('X轴')
ax2.set_ylabel('Y轴')
ax2.set_zlabel('Z轴')
plt.tight_layout()
plt.savefig('voxelization_visualization.png')
print("可视化结果已保存为'voxelization_visualization.png'")
2.4 体素化方法的优缺点
优点:
- 规则的数据结构,适合传统卷积操作
- 可以直接应用3D卷积神经网络
- 体素之间的空间关系明确
缺点:
- 计算和内存需求随分辨率立方增长(维度灾难)
- 高分辨率下信息损失少但计算昂贵
- 低分辨率下计算高效但信息损失大
- 大量体素可能是空的(稀疏性问题)
2.5 稀疏体素网络
为了解决常规体素化的计算和内存问题,研究者提出了稀疏体素网络,如SparseConvNet和MinkowskiNet,它们只处理非空体素。
# 稀疏体素卷积示例代码(使用MinkowskiEngine库)
import torch
import MinkowskiEngine as ME
class SparseVoxelNet(torch.nn.Module):
def __init__(self, in_channels=1, out_channels=10):
super(SparseVoxelNet, self).__init__()
self.conv1 = ME.MinkowskiConvolution(
in_channels=in_channels,
out_channels=32,
kernel_size=3,
stride=1,
dimension=3)
self.bn1 = ME.MinkowskiBatchNorm(32)
self.conv2 = ME.MinkowskiConvolution(
in_channels=32,
out_channels=64,
kernel_size=3,
stride=2,
dimension=3)
self.bn2 = ME.MinkowskiBatchNorm(64)
self.pooling = ME.MinkowskiGlobalPooling()
self.linear = torch.nn.Linear(64, out_channels)
def forward(self, x):
# x是一个SparseTensor
out = self.conv1(x)
out = self.bn1(out)
out = ME.MinkowskiReLU()(out)
out = self.conv2(out)
out = self.bn2(out)
out = ME.MinkowskiReLU()(out)
# 全局池化得到特征向量
out = self.pooling(out)
return self.linear(out)
def points_to_sparse_voxels(points, features=None, voxel_size=1.0):
"""
将点云转换为稀疏体素格式(适用于MinkowskiEngine)
参数:
- points: Nx3 的numpy数组,表示点云坐标
- features: Nx1 的numpy数组,表示每个点的特征(如果为None,则使用全1特征)
- voxel_size: 体素大小
返回:
- sparse_tensor: ME.SparseTensor,稀疏体素表示
"""
if features is None:
features = np.ones((points.shape[0], 1), dtype=np.float32)
# 量化点坐标
quantized_points = np.floor(points / voxel_size).astype(np.int32)
# 创建稀疏张量
coords = torch.from_numpy(quantized_points)
feats = torch.from_numpy(features)
return ME.SparseTensor(
features=feats,
coordinates=ME.utils.batched_coordinates([coords]),
)
# 注意:以上代码需要安装MinkowskiEngine库才能运行
# pip install -U MinkowskiEngine
3. 原始点云处理方法
与体素化方法不同,原始点云处理方法直接在无序点集上操作,不需要转换为规则网格。
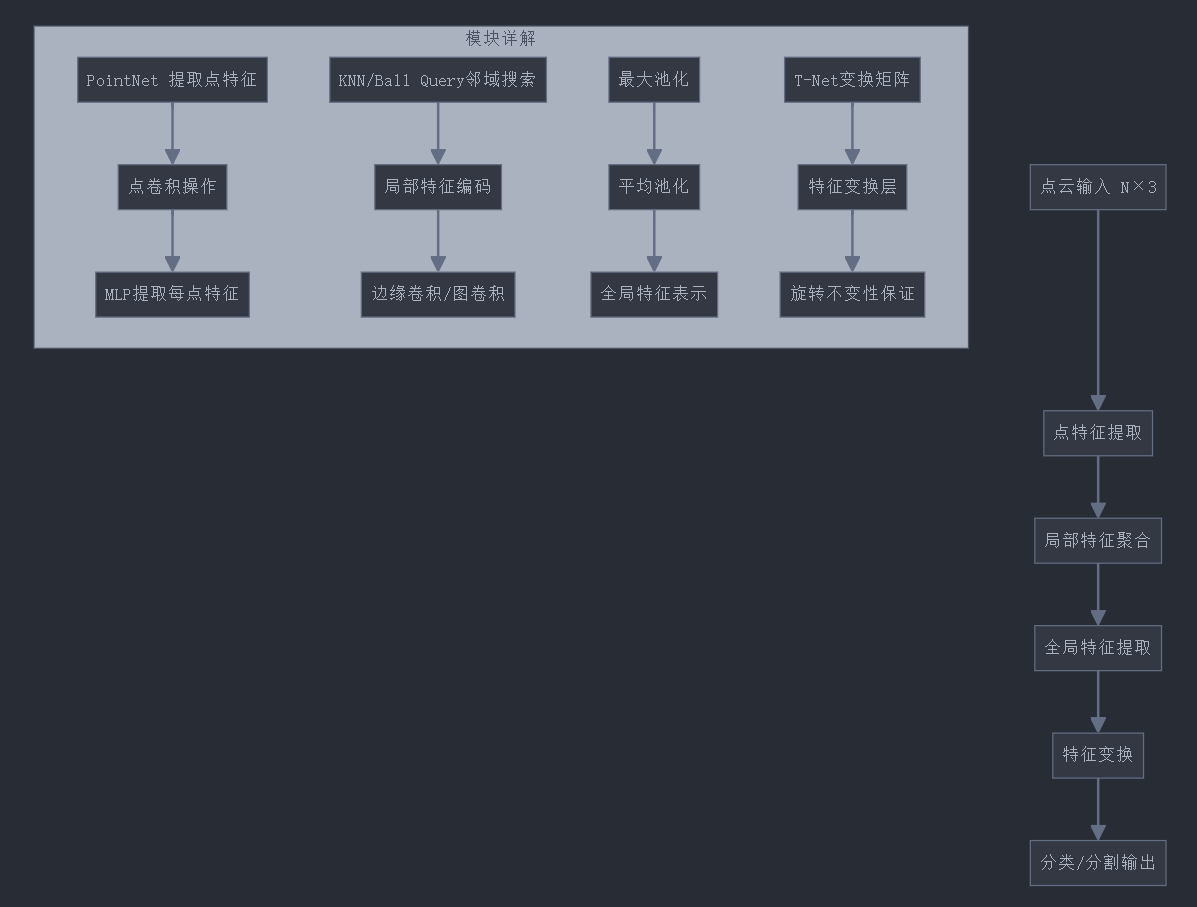
3.1 PointNet:直接处理点云的先驱
PointNet是第一个成功直接处理原始点云的深度学习架构,它具有以下特点:
- 使用逐点MLP (Multi-Layer Perceptron) 提取每个点的特征
- 使用全局最大池化保证排列不变性
- 使用T-Net实现仿射变换不变性
下面是PointNet的基本实现:
import torch
import torch.nn as nn
import torch.nn.functional as F
class TNet(nn.Module):
"""
T-Net学习仿射变换矩阵,用于输入点云的对齐
"""
def __init__(self, k=3):
super(TNet, self).__init__()
self.k = k
# 共享MLP
self.conv1 = nn.Conv1d(k, 64, 1)
self.conv2 = nn.Conv1d(64, 128, 1)
self.conv3 = nn.Conv1d(128, 1024, 1)
# 全连接层
self.fc1 = nn.Linear(1024, 512)
self.fc2 = nn.Linear(512, 256)
self.fc3 = nn.Linear(256, k*k)
# 批归一化层
self.bn1 = nn.BatchNorm1d(64)
self.bn2 = nn.BatchNorm1d(128)
self.bn3 = nn.BatchNorm1d(1024)
self.bn4 = nn.BatchNorm1d(512)
self.bn5 = nn.BatchNorm1d(256)
def forward(self, x):
batch_size = x.size()[0]
# 应用MLPs (nx3 -> nx64 -> nx128 -> nx1024)
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = F.relu(self.bn3(self.conv3(x)))
# 全局最大池化
x = torch.max(x, 2, keepdim=True)[0]
x = x.view(-1, 1024)
# 全连接层
x = F.relu(self.bn4(self.fc1(x)))
x = F.relu(self.bn5(self.fc2(x)))
x = self.fc3(x)
# 将输出重塑为变换矩阵
iden = torch.eye(self.k, dtype=x.dtype, device=x.device).view(1, self.k*self.k).repeat(batch_size, 1)
x = x + iden
x = x.view(-1, self.k, self.k)
return x
class PointNetBase(nn.Module):
"""
PointNet基础架构:对点云进行分类
"""
def __init__(self, num_classes=10, input_transform=True, feature_transform=True):
super(PointNetBase, self).__init__()
self.input_transform = input_transform
self.feature_transform = feature_transform
# 输入变换网络(3x3)
if self.input_transform:
self.stn = TNet(k=3)
# 特征提取
self.conv1 = nn.Conv1d(3, 64, 1)
self.conv2 = nn.Conv1d(64, 64, 1)
self.bn1 = nn.BatchNorm1d(64)
self.bn2 = nn.BatchNorm1d(64)
# 特征变换网络(64x64)
if self.feature_transform:
self.fstn = TNet(k=64)
# 更深层特征提取
self.conv3 = nn.Conv1d(64, 64, 1)
self.conv4 = nn.Conv1d(64, 128, 1)
self.conv5 = nn.Conv1d(128, 1024, 1)
self.bn3 = nn.BatchNorm1d(64)
self.bn4 = nn.BatchNorm1d(128)
self.bn5 = nn.BatchNorm1d(1024)
# 分类器
self.fc1 = nn.Linear(1024, 512)
self.fc2 = nn.Linear(512, 256)
self.fc3 = nn.Linear(256, num_classes)
self.bn6 = nn.BatchNorm1d(512)
self.bn7 = nn.BatchNorm1d(256)
self.dropout = nn.Dropout(p=0.3)
def forward(self, x):
# x的形状: [batch_size, 3, num_points]
n_pts = x.size()[2]
# 应用输入变换
if self.input_transform:
trans = self.stn(x)
x = torch.bmm(x.transpose(2, 1), trans).transpose(2, 1)
# MLP提取点特征
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
# 应用特征变换
if self.feature_transform:
trans_feat = self.fstn(x)
x = torch.bmm(x.transpose(2, 1), trans_feat).transpose(2, 1)
else:
trans_feat = None
# 继续提取特征
x = F.relu(self.bn3(self.conv3(x)))
x = F.relu(self.bn4(self.conv4(x)))
x = F.relu(self.bn5(self.conv5(x)))
# 全局最大池化
x = torch.max(x, 2, keepdim=True)[0]
x = x.view(-1, 1024)
# 全连接层和分类器
x = F.relu(self.bn6(self.fc1(x)))
x = F.relu(self.bn7(self.fc2(x)))
x = self.dropout(x)
x = self.fc3(x)
return F.log_softmax(x, dim=1), trans_feat
# 创建模型实例
model = PointNetBase(num_classes=10)
# 测试前向传播
batch_size = 2
num_points = 1024
point_cloud = torch.rand(batch_size, 3, num_points) # 随机生成点云数据
output, _ = model(point_cloud)
print(f"Input shape: {point_cloud.shape}")
print(f"Output shape: {output.shape}")
3.2 PointNet的局限性
尽管PointNet具有创新性,但它仍然有一些局限性:
- 不能有效捕获局部特征和点之间的相互关系
- 没有考虑点之间的几何关系
- 对细粒度形状差异不敏感
3.3 PointNet++:引入层次结构
PointNet++通过分层结构解决了PointNet的局限性,它采用:
- 设计采样层和分组层来构建局部区域
- 使用PointNet处理每个局部区域
- 层次化聚合多尺度特征
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
def square_distance(src, dst):
"""
计算两组点之间的成对距离平方
参数:
src: 源点集,形状为(B, N, C)
dst: 目标点集,形状为(B, M, C)
返回:
成对距离平方,形状为(B, N, M)
"""
B, N, _ = src.shape
_, M, _ = dst.shape
dist = -2 * torch.matmul(src, dst.permute(0, 2, 1))
dist += torch.sum(src ** 2, -1).view(B, N, 1)
dist += torch.sum(dst ** 2, -1).view(B, 1, M)
return dist
def index_points(points, idx):
"""
根据索引从点集中提取点
参数:
points: 输入点集,形状为(B, N, C)
idx: 索引,形状为(B, S) 或 (B, S, K)
返回:
索引点,形状为(B, S, C) 或 (B, S, K, C)
"""
device = points.device
B = points.shape[0]
view_shape = list(idx.shape)
view_shape[1:] = [1] * (len(view_shape) - 1)
repeat_shape = list(idx.shape)
repeat_shape[0] = 1
batch_indices = torch.arange(B, dtype=torch.long).to(device).view(view_shape).repeat(repeat_shape)
new_points = points[batch_indices, idx, :]
return new_points
def farthest_point_sample(xyz, npoint):
"""
FPS抽样:从点集中选择最远点采样
参数:
xyz: 点集坐标,形状为(B, N, 3)
npoint: 采样点数量
返回:
采样点的索引,形状为(B, npoint)
"""
device = xyz.device
B, N, C = xyz.shape
centroids = torch.zeros(B, npoint, dtype=torch.long).to(device)
distance = torch.ones(B, N).to(device) * 1e10
farthest = torch.randint(0, N, (B,), dtype=torch.long).to(device)
batch_indices = torch.arange(B, dtype=torch.long).to(device)
for i in range(npoint):
centroids[:, i] = farthest
centroid = xyz[batch_indices, farthest, :].view(B, 1, 3)
dist = torch.sum((xyz - centroid) ** 2, -1)
mask = dist < distance
distance[mask] = dist[mask]
farthest = torch.max(distance, -1)[1]
return centroids
def query_ball_point(radius, nsample, xyz, new_xyz):
"""
查找球形邻域内的点
参数:
radius: 球半径
nsample: 采样点数量
xyz: 所有点的坐标,形状为(B, N, 3)
new_xyz: 查询点的坐标,形状为(B, S, 3)
返回:
邻域点的索引,形状为(B, S, nsample)
"""
device = xyz.device
B, N, C = xyz.shape
_, S, _ = new_xyz.shape
sqrdists = square_distance(new_xyz, xyz)
group_idx = torch.arange(N, dtype=torch.long).to(device).view(1, 1, N).repeat([B, S, 1])
sqrdists_mask = sqrdists > radius ** 2
group_idx[sqrdists_mask] = N
group_idx = group_idx.sort(dim=-1)[0][:, :, :nsample]
# 处理一个球中点数少于nsample的情况
group_first = group_idx[:, :, 0].view(B, S, 1).repeat([1, 1, nsample])
mask = group_idx == N
group_idx[mask] = group_first[mask]
return group_idx
class PointNetSetAbstraction(nn.Module):
"""
PointNet++的集合抽象层
"""
def __init__(self, npoint, radius, nsample, in_channel, mlp, group_all=False):
super(PointNetSetAbstraction, self).__init__()
self.npoint = npoint
self.radius = radius
self.nsample = nsample
self.group_all = group_all
self.mlp_convs = nn.ModuleList()
self.mlp_bns = nn.ModuleList()
last_channel = in_channel
for out_channel in mlp:
self.mlp_convs.append(nn.Conv2d(last_channel, out_channel, 1))
self.mlp_bns.append(nn.BatchNorm2d(out_channel))
last_channel = out_channel
def forward(self, xyz, points):
"""
前向传播
参数:
xyz: 输入点的坐标,形状为(B, N, 3)
points: 输入点的特征,形状为(B, N, C)
返回:
new_xyz: 新采样点的坐标,形状为(B, npoint, 3)
new_points: 新采样点的特征,形状为(B, npoint, mlp[-1])
"""
device = xyz.device
B, N, C = xyz.shape
if self.group_all:
# 将所有点作为一个组
new_xyz = torch.zeros(B, 1, C).to(device)
grouped_xyz = xyz.view(B, 1, N, C)
else:
# FPS采样获取新的中心点
fps_idx = farthest_point_sample(xyz, self.npoint)
new_xyz = index_points(xyz, fps_idx)
# 球查询分组
idx = query_ball_point(self.radius, self.nsample, xyz, new_xyz)
grouped_xyz = index_points(xyz, idx)
# 中心化坐标
grouped_xyz_norm = grouped_xyz - new_xyz.unsqueeze(2)
# 处理特征
if points is not None:
if self.group_all:
grouped_points = points.view(B, 1, N, -1)
else:
grouped_points = index_points(points, idx)
# 连接坐标和特征
grouped_points = torch.cat([grouped_xyz_norm, grouped_points], dim=-1)
else:
grouped_points = grouped_xyz_norm
# 变换输入形状适应卷积操作
grouped_points = grouped_points.permute(0, 3, 2, 1)
# 应用MLPs
for i, conv in enumerate(self.mlp_convs):
bn = self.mlp_bns[i]
grouped_points = F.relu(bn(conv(grouped_points)))
# 池化
new_points = torch.max(grouped_points, 2)[0].permute(0, 2, 1)
return new_xyz, new_points
class PointNetPlusPlus(nn.Module):
"""
PointNet++分类网络
"""
def __init__(self, num_classes=10):
super(PointNetPlusPlus, self).__init__()
# SA模块1:输入点云 -> 512点
self.sa1 = PointNetSetAbstraction(
npoint=512,
radius=0.2,
nsample=32,
in_channel=3,
mlp=[64, 64, 128],
group_all=False
)
# SA模块2:512点 -> 128点
self.sa2 = PointNetSetAbstraction(
npoint=128,
radius=0.4,
nsample=64,
in_channel=128 + 3,
mlp=[128, 128, 256],
group_all=False
)
# SA模块3:128点 -> 全局特征
self.sa3 = PointNetSetAbstraction(
npoint=None,
radius=None,
nsample=None,
in_channel=256 + 3,
mlp=[256, 512, 1024],
group_all=True
)
# 分类器
self.fc1 = nn.Linear(1024, 512)
self.bn1 = nn.BatchNorm1d(512)
self.drop1 = nn.Dropout(0.4)
self.fc2 = nn.Linear(512, 256)
self.bn2 = nn.BatchNorm1d(256)
self.drop2 = nn.Dropout(0.4)
self.fc3 = nn.Linear(256, num_classes)
def forward(self, xyz):
"""
前向传播
参数:
xyz: 输入点云,形状为(B, 3, N)
返回:
分类分数,形状为(B, num_classes)
"""
B, C, N = xyz.shape
xyz = xyz.permute(0, 2, 1) # 变换为(B, N, 3)
# 集合抽象层
l1_xyz, l1_points = self.sa1(xyz, None)
l2_xyz, l2_points = self.sa2(l1_xyz, l1_points)
l3_xyz, l3_points = self.sa3(l2_xyz, l2_points)
# l3_points的形状为(B, 1, 1024)
x = l3_points.view(B, 1024)
# 分类器
x = self.drop1(F.relu(self.bn1(self.fc1(x))))
x = self.drop2(F.relu(self.bn2(self.fc2(x))))
x = self.fc3(x)
return F.log_softmax(x, dim=1)
# 创建模型实例
model = PointNetPlusPlus(num_classes=10)
# 测试前向传播
batch_size = 2
num_points = 1024
point_cloud = torch.rand(batch_size, 3, num_points) # 随机生成点云数据
output = model(point_cloud)
print(f"Input shape: {point_cloud.shape}")
print(f"Output shape: {output.shape}")
4. 点云处理方法的对比分析
下面对体素化方法和原始点云处理方法进行全面比较:
| 特性 | 体素化方法 | 原始点云方法 |
|---|---|---|
| 数据结构 | 规则3D网格 | 无序点集 |
| 计算复杂度 | 随分辨率立方增长 | 随点数线性增长 |
| 内存需求 | 高(尤其高分辨率时) | 低至中等 |
| 细节保留 | 取决于分辨率 | 很好 |
| 排列不变性 | 天然具备 | 需特殊设计 |
| 局部特征提取 | 自然支持(类似2D CNN) | 需特殊机制(如PointNet++) |
| 计算效率 | 低(稀疏体素网络改善) | 高 |
| 输入大小限制 | 受分辨率限制 | 灵活 |
| 代表算法 | VoxNet, OctNet, SVCH | PointNet, PointNet++, DGCNN |
在实践中,选择哪种方法取决于具体应用场景的需求:
- 对于需要捕获精细局部结构的任务(如部件分割),原始点云方法更适合
- 对于需要全局形状理解的任务(如物体识别),体素化方法可能更简单有效
- 对于大规模点云处理,稀疏体素网络或降采样+原始点云方法是折中方案
在下一部分中,我们将深入探讨点云特征提取的更多高级技术,特别是旋转等变卷积的数学原理,以及如何在实际应用中实现旋转不变性和旋转等变性。
清华大学全五版的《DeepSeek教程》完整的文档需要的朋友,关注我私信:deepseek 即可获得。
怎么样今天的内容还满意吗?再次感谢朋友们的观看,关注GZH:凡人的AI工具箱,回复666,送您价值199的AI大礼包。最后,祝您早日实现财务自由,还请给个赞,谢谢!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









