






占道经营监测识别系统 出店摆摊识别预警系统对城市道路进行实时监测,当占道经营监测识别系统 出店摆摊识别预警系统监测到流动商贩占道经营或者出店摆摊行为时,无需人为干预占道经营监测识别算法 出店摆摊识别预警算法立即告警并推送给后台管理人员通知值班人员及时制止。占道经营监测识别算法 出店摆摊识别预警算法通过AI视频分析技术,对违规摆摊占道经营行为形成强大的震慑作用,提升城市街道监控区域的管控效率。
YOLOv5是一种单阶段目标检测算法,该算法在YOLOv4的基础上添加了一些新的改进思路,使其速度与精度都得到了极大的性能提升。主要的改进思路如下所示:
- 输入端:在模型训练阶段,提出了一些改进思路,主要包括Mosaic数据增强、自适应锚框计算、自适应图片缩放;
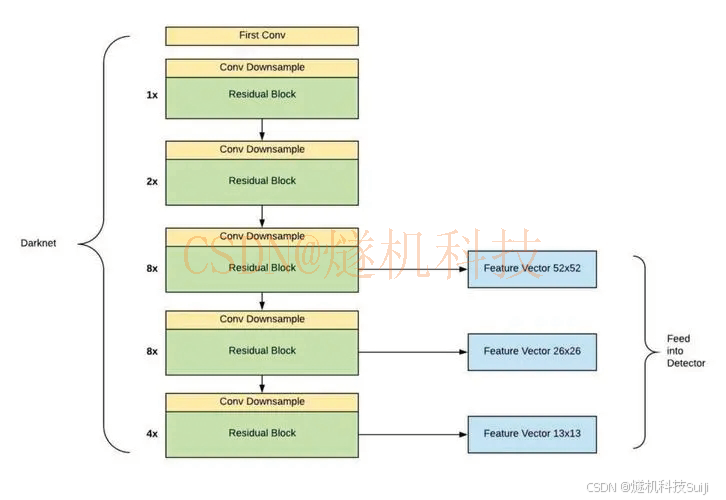
- 基准网络:融合其它检测算法中的一些新思路,主要包括:Focus结构与CSP结构;
- Neck网络:目标检测网络在BackBone与最后的Head输出层之间往往会插入一些层,Yolov5中添加了FPN+PAN结构;
- Head输出层:输出层的锚框机制与YOLOv4相同,主要改进的是训练时的损失函数GIOU_Loss,以及预测框筛选的DIOU_nms。
社会的发展和人们生活水平的进步,大家对于城市街道环境和城市空气质量越来越重视,希望大家都规范生活认真工作。在城市管理过程中,也存在少数流动商贩占道经营的行为。当出店摆摊占道经营的行为,多在学校门口、小区门口、热闹路段,且多为人流高峰期。时间久了会给附近居民及城市环境带来一定的影响。导致噪音严重超标,油烟飞扬。流动商贩摊位零乱,严重影响道路交通秩序,扰乱正常社会经济秩序。
占道经营监测识别系统 出店摆摊识别预警系统通过AI视频分析技术,占道经营监测识别算法 出店摆摊识别预警算法对违规经营、占道经营、沿街晾晒、乱搭乱建等城市问题进行监测,实现7*24小时不间断自动识别预警,实现业务协同。占道经营监测识别算法 出店摆摊识别预警算法帮助后台城市管理人员做到及时发现、处理和解决城市出现的各种问题。占道经营监测识别算法 出店摆摊识别预警算法基于人工智能视觉分析技术,不需人为干预自动识别街道餐饮门店出店经营等行为,提高城市管理效率。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









