







 本文详细介绍了动态仿真的关键概念,包括如何创建仿真文件、设置运动学和动力学环境。讨论了不同类型的连杆和关节,如旋转副、柱面副和螺旋副,以及它们的驱动方式。此外,还涵盖了弹簧和阻尼器的力学表现,3D接触模拟,以及复杂场景如弹性碰撞和自动化机械手的仿真。电子表格驱动被提及作为实现无规律运动的一种方法。
本文详细介绍了动态仿真的关键概念,包括如何创建仿真文件、设置运动学和动力学环境。讨论了不同类型的连杆和关节,如旋转副、柱面副和螺旋副,以及它们的驱动方式。此外,还涵盖了弹簧和阻尼器的力学表现,3D接触模拟,以及复杂场景如弹性碰撞和自动化机械手的仿真。电子表格驱动被提及作为实现无规律运动的一种方法。
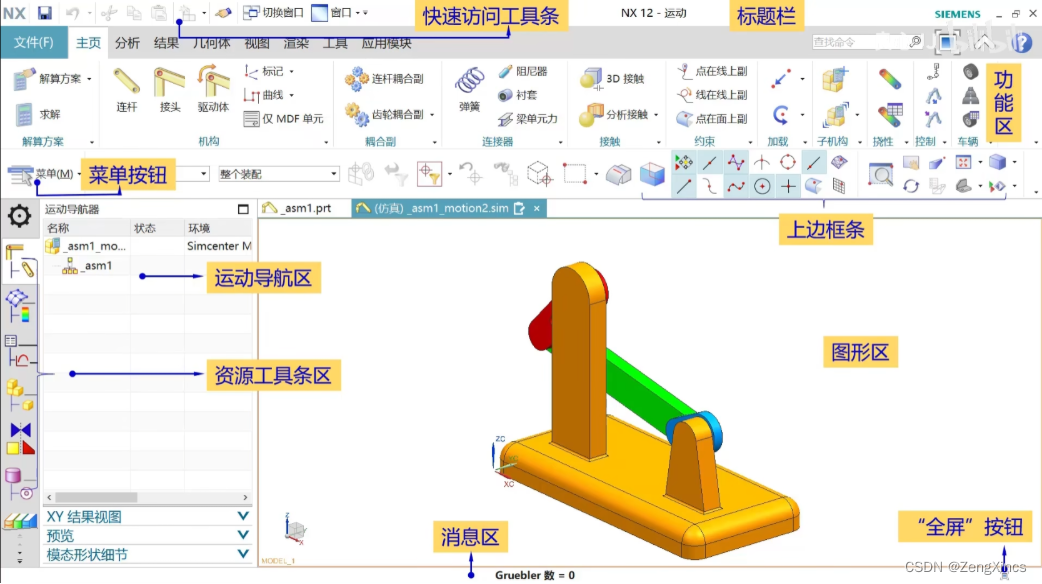
仿真界面与文件操作
新建仿真文件(.sim)
仿真文件和我们的部件必须放在同一目录
首选项和默认设置
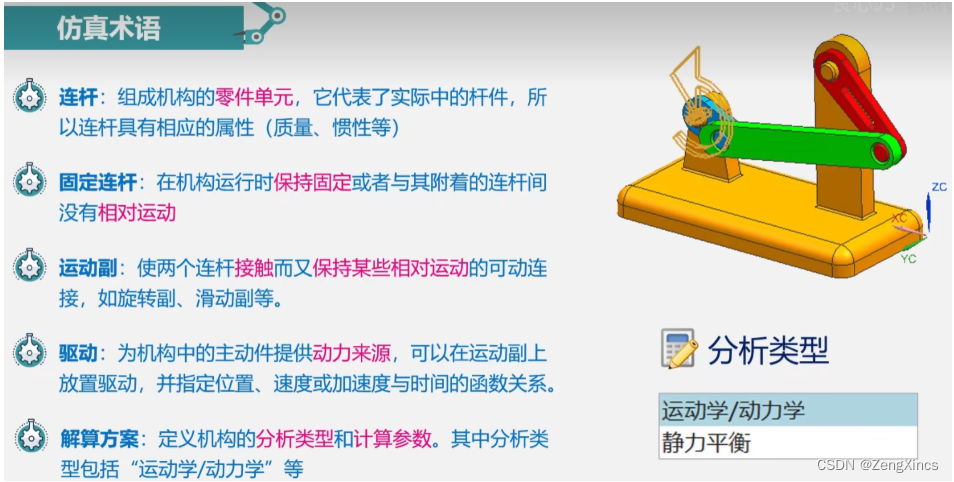
用户默认设置的前处理器中可以设置环境为动力学或运动学,运动学不考虑连杆的质量和惯性等(理想状态)
运动仿真流程
仿真文件是由装配体构成的,装配体是由不同的组件装配而成的。因此,在做装配体的仿真运动时,需要将基于组件的仿真勾选

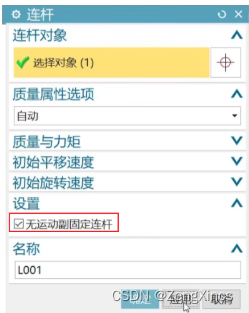
可以直接设置为固定连杆
这里旋转副选择的是固定连杆,啮合连杆选择的是矮的的这个连杆 (啮合关系是指两机械零件间的一种传动关系,也称啮合传动)
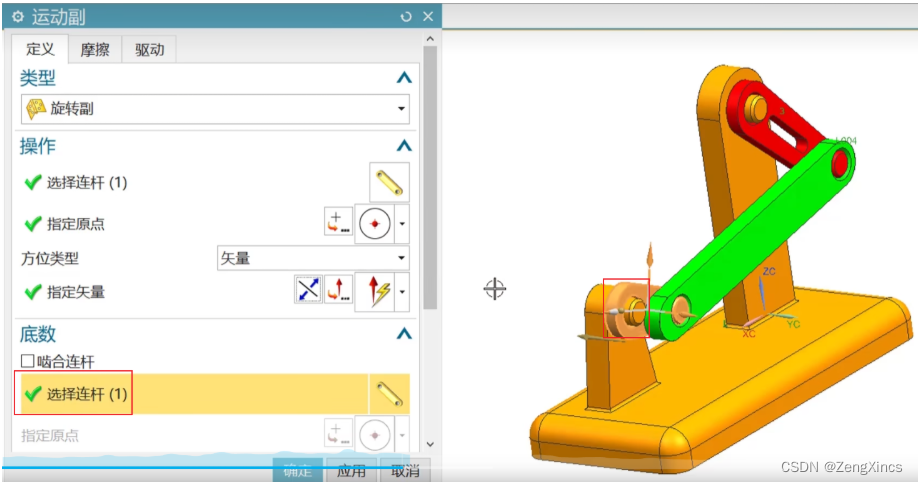
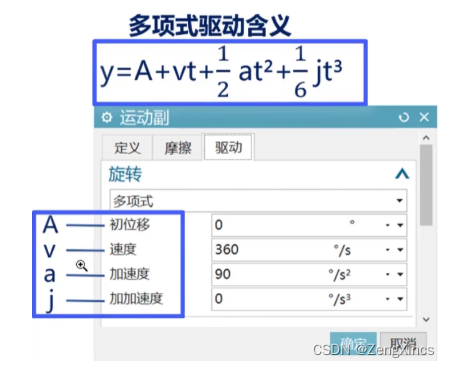
驱动可以选择连杆或者运动副驱动
常规驱动是基于运动和时间的一种关系
旋转副
旋转副的方向是根据右手定则来的,大拇指指向箭头方向,四指弯曲则是运动方向
柱面附
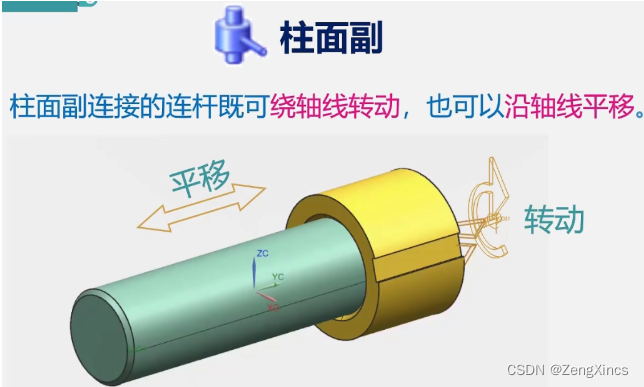
柱面副不能定义运动的极限范围,如果需要可以用一个旋转副和一个滑动副替代
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









