







众所周知,moba中的每个英雄都有一套自己的技能的攻击范围方式,有如廉颇一样的圆形范围,有火舞一样的直线范围,吕布的扇形方天戟范围,还有牛魔大招时的矩形范围等等
一些技能是通过物理的碰撞检测来判断的,物理检测的诟病就在于开销过大,一般的,不会在游戏中使用物理碰撞来实现范围伤害.那么用什么呢?
大多数是通过范围来检测的。所以在能考虑不用物理来检测的情况下,开发者更倾向来自己通过算法模拟实现.
此篇和各位一起研究一下几种范围伤害的判断.
矩形范围判断
不管技能的特效有多炫酷,在背后都是规规矩矩的范围判断.矩形是范围判断中最简单的一种.首先,只要知道对角的两个点,就可以判断出敌人是否是在这个矩形范围内了.为什么呢?因为在游戏开发过程中,技能一般是在地面上的,那么.就确定这两个点是在这个平面上.然后对角的两个点可以把另一个对角的点确定出来.
首先,我们通过2个已知的点确定一个矩形,我们需要一个Rectangle的类,用来获取4个点和判断某个点是否在矩形内.
首先是通过2个已知点得出其他的两个点:
1using System.Collections;
2using System.Collections.Generic;
3using UnityEngine;
4
5public class Rectangle
6{
7
8 public Vector3 corner1;//四边形的一个对角位置
9 public Vector3 corner2;//四边形的另一个对角位置
10
11 //获得四个角顶点
12 public void GetVerts(out Vector3 vertex0, out Vector3 vertex1, out Vector3 vertex2, out Vector3 vertex3)
13 {
14 vertex0 = this.corner1;
15 vertex1 = new Vector3(this.corner2.x, 0, this.corner1.z);
16 vertex2 = this.corner2;
17 vertex3 = new Vector3(this.corner1.x, 0, this.corner2.z);
18 }
19}
我们就通过这个方法,获得矩形的4个点,来画出矩形的区域:
1using System.Collections;
2using System.Collections.Generic;
3using UnityEngine;
4
5public class TestRt : MonoBehaviour
6{
7
8 //public Transform Point;
9 public Transform RtPoint0, RtPoint1;
10 public Rectangle rtBox;
11
12 private const float _pointRadius = 0.1f;
13
14 private void OnDrawGizmos()
15 {
16 rtBox = CreateFromTwoPoints(RtPoint0.position, RtPoint1.position);
17
18 if (rtBox != null)
19 {
20 DrawFrameLine(rtBox);
21 }
22 }
23
24 public Rectangle CreateFromTwoPoints(Vector3 point0, Vector3 point1)
25 {
26 Rectangle rt = new Rectangle();
27 if (point0.x < point1.x)
28 {
29 rt.corner1.x = point0.x;
30 rt.corner2.x = point1.x;
31 }
32 else
33 {
34 rt.corner1.x = point1.x;
35 rt.corner2.x = point0.x;
36 }
37 if (point0.z < point1.z)
38 {
39 rt.corner1.z = point0.z;
40 rt.corner2.z = point1.z;
41 }
42 else
43 {
44 rt.corner1.z = point1.z;
45 rt.corner2.z = point0.z;
46 }
47 return rt;
48 }
49
50 protected void DrawFrameLine(Rectangle box)
51 {
52 Vector3 v0, v1, v2, v3;
53 box.GetVerts(out v0, out v1, out v2, out v3);
54 Gizmos.DrawLine(v0, v1);
55 Gizmos.DrawLine(v1, v2);
56 Gizmos.DrawLine(v2, v3);
57 Gizmos.DrawLine(v3, v0);
58 }
59}
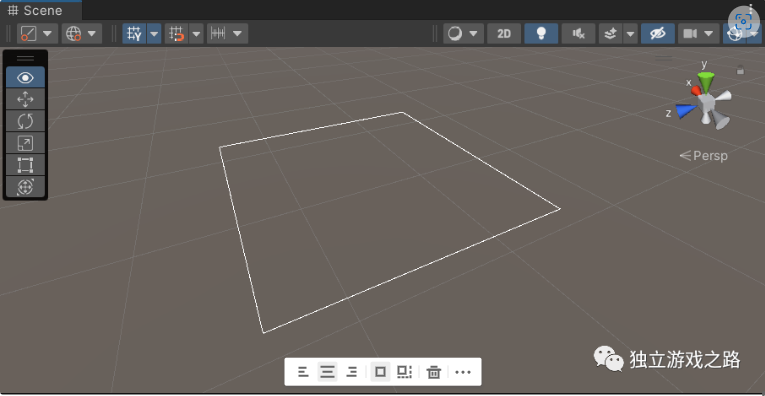
然后对2个点进行赋值,注意,Y轴要为0,因为我们规定的平面是xz平面.那么我们看看画出的效果:
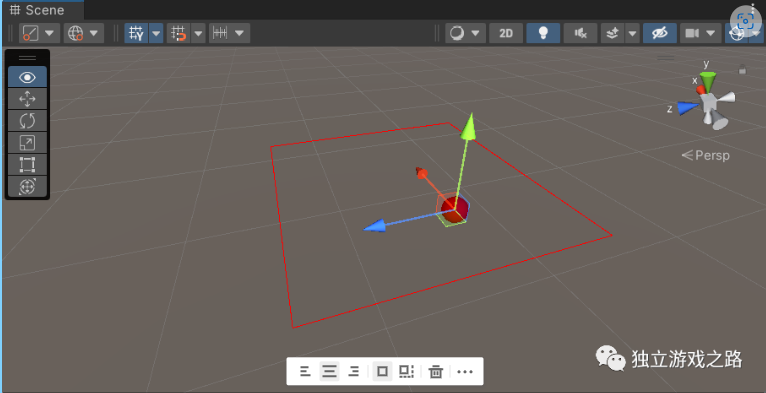
判断就更为简单了,同样的这个点的Y轴要为0.我们做个这样的功能,当这个点在矩形范围内的时候,框变红,如果不在,框为蓝色:
1using System.Collections;
2using System.Collections.Generic;
3using UnityEngine;
4
5public class TestRt : MonoBehaviour
6{
7
8 public Transform Point;
9 public Transform RtPoint0, RtPoint1;
10 public Rectangle rtBox;
11
12 private const float _pointRadius = 0.1f;
13
14 private void OnDrawGizmos()
15 {
16 rtBox = CreateFromTwoPoints(RtPoint0.position, RtPoint1.position);
17 bool cont = rtBox.CheckisInzone(Point.position);
18 if (cont)
19 {
20 Gizmos.color = Color.red;
21 }
22 else
23 {
24 Gizmos.color = Color.blue;
25 }
26
27 if (rtBox != null)
28 {
29 DrawFrameLine(rtBox);
30 Gizmos.DrawSphere(Point.position, _pointRadius);
31 }
32 }
33
34 public Rectangle CreateFromTwoPoints(Vector3 point0, Vector3 point1)
35 {
36 Rectangle rt = new Rectangle();
37 if (point0.x < point1.x)
38 {
39 rt.corner1.x = point0.x;
40 rt.corner2.x = point1.x;
41 }
42 else
43 {
44 rt.corner1.x = point1.x;
45 rt.corner2.x = point0.x;
46 }
47 if (point0.z < point1.z)
48 {
49 rt.corner1.z = point0.z;
50 rt.corner2.z = point1.z;
51 }
52 else
53 {
54 rt.corner1.z = point1.z;
55 rt.corner2.z = point0.z;
56 }
57 return rt;
58 }
59
60 protected void DrawFrameLine(Rectangle box)
61 {
62 Vector3 v0, v1, v2, v3;
63 box.GetVerts(out v0, out v1, out v2, out v3);
64 Gizmos.DrawLine(v0, v1);
65 Gizmos.DrawLine(v1, v2);
66 Gizmos.DrawLine(v2, v3);
67 Gizmos.DrawLine(v3, v0);
68 }
69}
我们来看下效果:
不在矩形范围内:
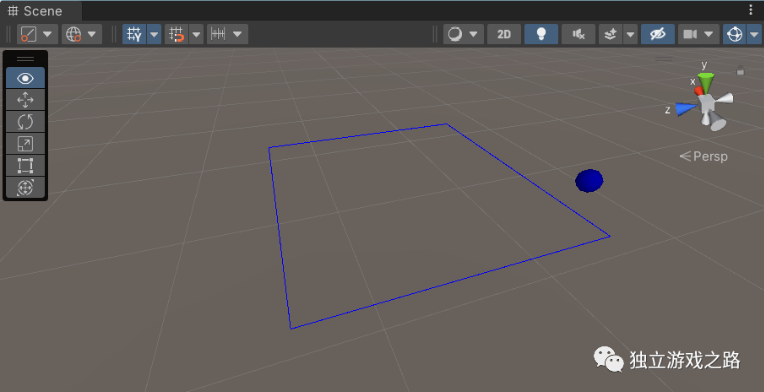
在矩形范围内:
在这里插入图片描述
总结:矩形不一定是通过两个对角的点来确定.也可以通过一个中间点,然后对于中间点,偏移某个变量.也可以生成一个矩形的判断范围,只要知道四个角的点位置,就能判断.
圆形范围判断
圆形的范围判断似乎也很简单.首先确保点都在同一个平面上,知道圆形的中心点以及半径的大小,判断某个点与圆心的距离,如果小于半径,那么就是在圆里,反之,就在圆外.
那么,真的可以这么简单的实现出来吗?
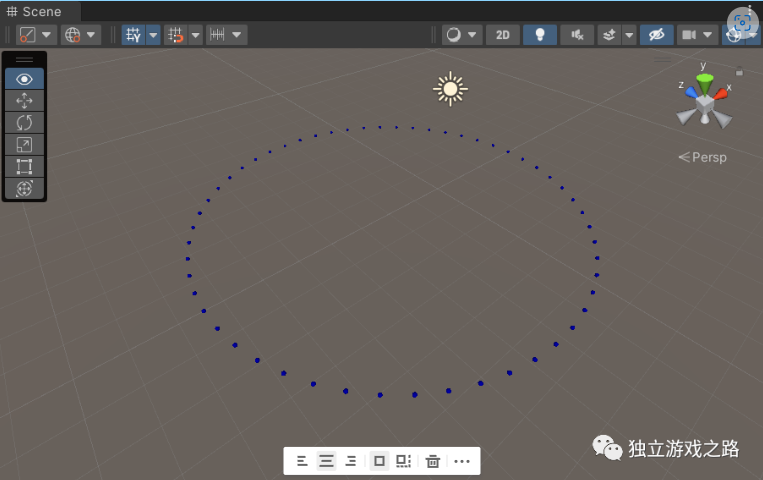
我们首先定义圆心以及半径的大小.绘制一个圆形,因为unity中没有绘制曲线的接口,所以我们打算用若干个点组成一个近似的圆形.其实本质上是个多边形.
首先我们要明白,只知道圆心和半径,怎么找出若干个点.围成一个近似圆的图形.那么,这里有个概念要清楚:弧度.弧度是干什么的呢?抛去复杂的解释,简单的来说就是单位圆的周长为2π , 2π 的弧度代表一个完整的圆. 记作: 2 πrad 一个圆的度数是360度,那么一个弧度就是180/π 那么也许你会有疑问,知道弧度能干啥呢?我们可以这样.假设我们的近似圆的多边形为正50边形,那么我们就可以通过弧度来计算出角度 :2π /50 即可等于单个的角度
有点像这种感觉:
那么通过弧度,就可以计算出点的位置了,公式如下:

其中center为圆心,radius为半径,randian为弧度.
好的,那么我们运用公式,写出绘制点的方法:
1using System.Collections;
2using System.Collections.Generic;
3using UnityEngine;
4
5public class circleTest : MonoBehaviour
6{
7 //圆心
8 public Transform Center;
9 //半径
10 public float Radius;
11 //多边形精度
12 public int count = 40;
13 private void OnDrawGizmos()
14 {
15 DrawCircle();
16 }
17
18 protected void DrawCircle()
19 {
20 Gizmos.color = Color.blue;
21 float radian = 2f * Mathf.PI / count;
22 //绘制圆形基础点的个数 适当即可
23 //Vector3 prev = Getposition(0);
24 for (int i = 1; i <= count; ++i)
25 {
26 Vector3 curr = new Vector3(
27 Center.position.x + (Radius * Mathf.Cos(i * radian)),
28 0,
29 Center.position.z + (Radius * Mathf.Sin(i * radian)));
30
31 Gizmos.DrawSphere(curr, 0.05f);
32
33 }
34 }
35}
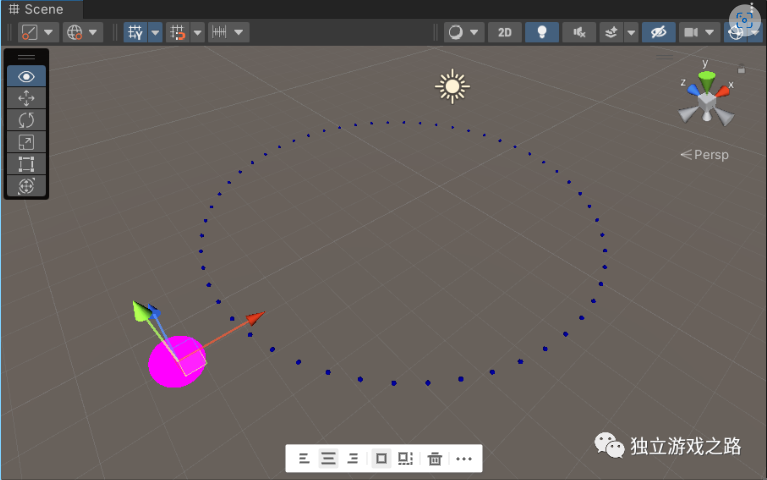
那么,我们可以看到一个近似圆的点的集合:
那么.我们和之前一样,如果目标点在园内,就是红色,如果不在,那就是蓝色.我们在原有代码基础上修改:
1using System.Collections;
2using System.Collections.Generic;
3using UnityEngine;
4
5public class circleTest : MonoBehaviour
6{
7 public Transform Point;
8 //圆心
9 public Transform Center;
10 //半径
11 public float Radius;
12 //多边形精度
13 public int count = 40;
14 private void OnDrawGizmos()
15 {
16 DrawCircle();
17 }
18
19 protected void DrawCircle()
20 {
21 if (checkInZone(Point.position))
22 {
23 Gizmos.color = Color.red;
24 }
25 else
26 {
27 Gizmos.color = Color.blue;
28 }
29 ...
30 }
31
32 bool checkInZone(Vector3 pointPos)
33 {
34 Vector3 offset = pointPos - Center.position;
35 if (offset.sqrMagnitude <= (Radius * Radius))
36 {
37 return true;
38 }
39 return false;
40 }
41}
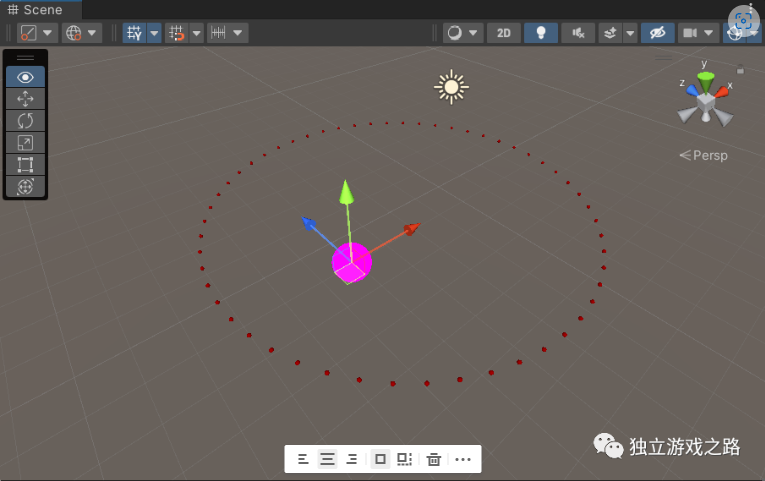
那么进行一个测试:
检测点在圆的外部:
检测点在圆的内部
三角形范围判断
三角形呢,其实是一个比较复杂的判断,绘制图像倒还好说,就是三个点,直接就可以绘制出来一个三角形,不过为了将问题简单化,所以还是老样子,我们的三角形三个点的Y轴都是0.
1using System.Collections;
2using System.Collections.Generic;
3using UnityEngine;
4
5public class Triangle : MonoBehaviour
6{
7 public Transform pos1;
8 public Transform pos2;
9 public Transform pos3;
10
11 private void OnDrawGizmos()
12 {
13 Gizmos.DrawLine(pos1.position, pos2.position);
14 Gizmos.DrawLine(pos2.position, pos3.position);
15 Gizmos.DrawLine(pos3.position, pos1.position);
16 }
17}
太简单了,就不放图片了.反正各位都能看出来
好的,接下来就要说到比较复杂的东西了,其实讲出来也不算复杂,只是初中的知识.判断一个点是否在三角形内,大概有3种办法
第一种办法:内角和法
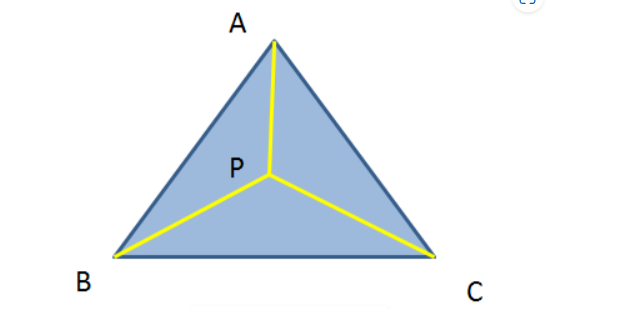
在这里插入图片描述
连接P点和三角形的三个顶点,得到三条线段PA,PB和PC,求出这三条线段与三角形各边的夹角,如果所有的夹角的内角和为180,那么就说明P点在三角形内,否则,就不在.但是这种办法如果是几何题,那么很好解,但是在我们的程序中,这个不好实现,因为需要加6个角,然后各种向量的计算.所以一般的,这种耗费性能的操作,直接舍弃掉.
第二种办法:同向法
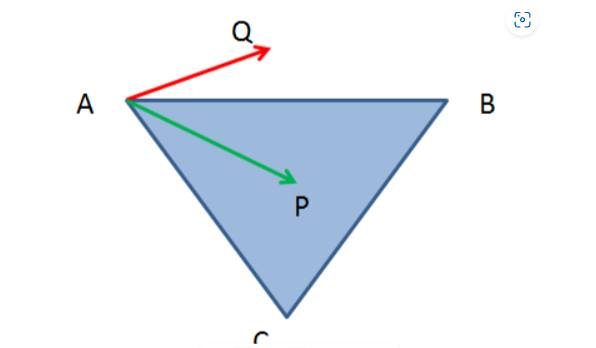
那么同向法怎么理解呢?就是不管你是顺时针还是逆时针去遍历这些线段,会发现P点始终在这条线的一侧,如果是顺时针,那么线段就是AB ,BC ,CA ,会发现P点始终就是在你的右侧. 如果不符合这个规律,那么这个点就不在三角形内.
第三种方法重心法
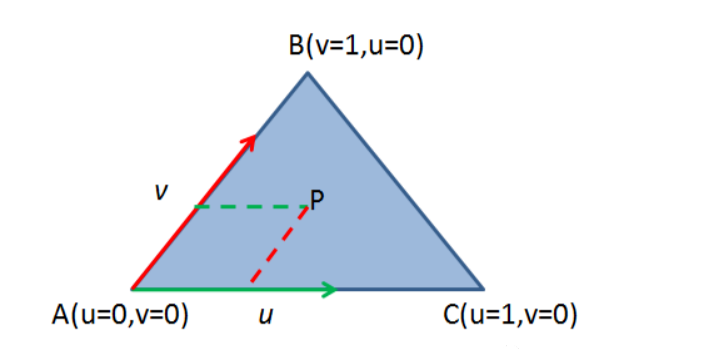
三角形上的点都有这样的一个特性,假如B点,假设是A点移动了AB的一段距离,C点就是A移动了AC距离, 其中UV的取值范围为正,且U+V<1.
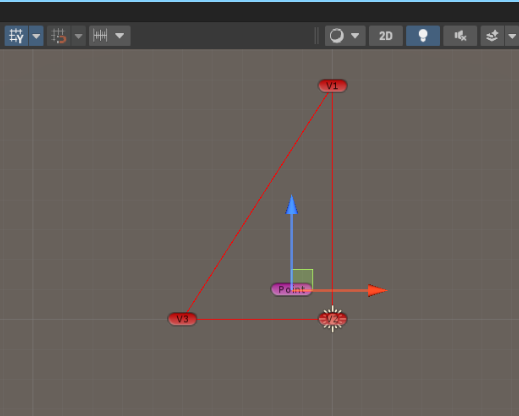
我们这里直接使用重心法
1using UnityEngine;
2
3public class Triangle :MonoBehaviour
4{
5
6 public Transform V1, V2, V3, Point;
7
8 private void OnDrawGizmos()
9 {
10 bool isInangle = IsPointInTriangle(V1.position , V2.position , V3.position , Point.position );
11 if (isInangle)
12 {
13 Gizmos.color = Color.red;
14 }
15 else
16 {
17 Gizmos.color = Color.blue;
18 }
19 Gizmos.DrawLine(V1.position , V2.position );
20 Gizmos.DrawLine(V2.position , V3.position );
21 Gizmos.DrawLine(V3.position , V1.position );
22 }
23
24
25
26 bool IsPointInTriangle(Vector3 p1, Vector3 p2, Vector3 p3, Vector3 targetPoint)
27 {
28 Vector3 v0 = p2 - p1;
29 Vector3 v1 = p3 - p1;
30 Vector3 v2 = targetPoint - p1;
31
32 float _00 = Vector3.Dot(v0, v0);
33 float _01 = Vector3.Dot(v0, v1);
34 float _02 = Vector3.Dot(v0, v2);
35 float _11 = Vector3.Dot(v1, v1);
36 float _12 = Vector3.Dot(v1, v2);
37
38 float inver = 1 / (_00 * _11 - _01 * _01);
39 float u = (_11 * _02 - _01 * _12) * inver;
40 if (u < 0 || u > 1)
41 return false;
42 float v = (_00 * _12 - _01 * _02) * inver;
43 if (v < 0 || v > 1)
44 return false;
45 return u + v < 1;
46 }
47}
我们来试试效果:当点在三角形内:
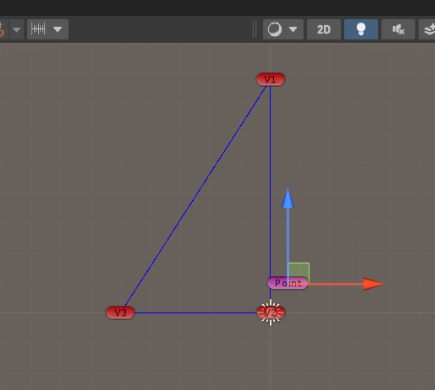
当点不在三角形内:
扇形范围判断
扇形范围判断,其实我们可以理解为一个圆形的判断变种,只是在特定的圆形角度里面才会判断,如果不在这个角度中,直接返回一个false即可.
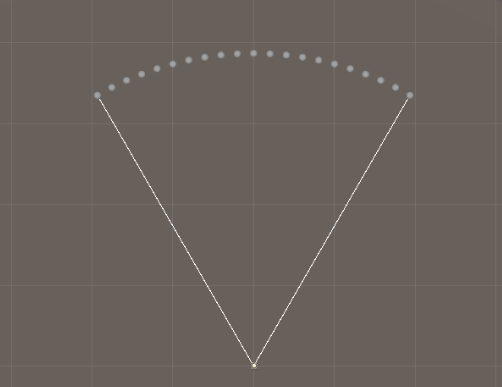
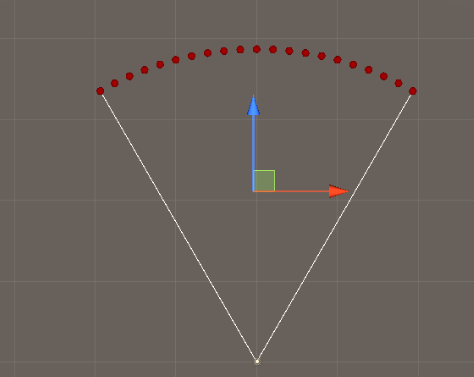
首先还是先画出一个扇形,我们这样来设计,比如这个扇形的角度是60度,我们分为左右,一边30度,这样对于程序好写一点,首先画出扇形的两个边:
1using System.Collections;
2using System.Collections.Generic;
3using UnityEngine;
4
5public class Fanshaped : MonoBehaviour
6{
7 public float angel = 60;
8 public float radius = 4;
9
10
11 private void OnDrawGizmos()
12 {
13 //
14 float x = radius * Mathf.Sin(angel / 2 * Mathf.Deg2Rad);//角度转换为弧度
15 float y = Mathf.Sqrt(Mathf.Pow(radius, 2) - Mathf.Pow(x, 2f));
16 Vector3 a = new Vector3(transform.position.x - x, 0, transform.position.z + y);
17 Vector3 b = new Vector3(transform.position.x + x, 0, transform.position.z + y);
18
19 Gizmos.DrawLine(transform.position, a);
20 Gizmos.DrawLine(transform.position, b);
21
22
23
24 }
25}
然后就是和圆形差不多的算法,绘制一个弧形:
1using System.Collections;
2using System.Collections.Generic;
3using UnityEngine;
4
5public class Fanshaped : MonoBehaviour
6{
7 public float angel = 60;
8 public float radius = 4;
9 public int count = 10;//扇形的精度
10
11 private void OnDrawGizmos()
12 {
13 //
14 float x = radius * Mathf.Sin(angel / 2 * Mathf.Deg2Rad);//角度转换为弧度
15 float y = Mathf.Sqrt(Mathf.Pow(radius, 2) - Mathf.Pow(x, 2f));
16 Vector3 a = new Vector3(transform.position.x - x, 0, transform.position.z + y);
17 Vector3 b = new Vector3(transform.position.x + x, 0, transform.position.z + y);
18
19 Gizmos.DrawLine(transform.position, a);
20 Gizmos.DrawLine(transform.position, b);
21
22 float half = angel / 2;
23
24 for (int i = 0; i <= count ; i++)
25 {
26
27 float temp = (half / count);
28 temp *= i;
29 x = radius * Mathf.Sin((temp) * Mathf.Deg2Rad);
30 y = Mathf.Sqrt(Mathf.Pow(radius, 2) - Mathf.Pow(x, 2f));
31 a = new Vector3(transform.position.x - x, 0, transform.position.z + y);
32 Gizmos.DrawSphere(a, 0.05f);
33 x = radius * Mathf.Sin((-temp) * Mathf.Deg2Rad);
34 y = Mathf.Sqrt(Mathf.Pow(radius, 2) - Mathf.Pow(x, 2f));
35 a = new Vector3(transform.position.x - x, 0, transform.position.z + y);
36 Gizmos.DrawSphere(a, 0.05f);
37 }
38
39 }
40}
绘制的弧形如下:

14 {
15 //
16 float x = radius * Mathf.Sin(angel / 2 * Mathf.Deg2Rad);//角度转换为弧度
17 float y = Mathf.Sqrt(Mathf.Pow(radius, 2) - Mathf.Pow(x, 2f));
18 Vector3 a = new Vector3(transform.position.x - x, 0, transform.position.z + y);
19 Vector3 b = new Vector3(transform.position.x + x, 0, transform.position.z + y);
20
21 Gizmos.DrawLine(transform.position, a);
22 Gizmos.DrawLine(transform.position, b);
23
24 float half = angel / 2;
25
26 if (IsInRange(Point))
27 {
28 Gizmos.color = Color.red;
29 }
30 else
31 {
32 Gizmos.color = Color.blue;
33 }
34
35 for (int i = 0; i <= count ; i++)
36 {
37
38 float temp = (half / count);
39 temp *= i;
40 x = radius * Mathf.Sin((temp) * Mathf.Deg2Rad);
41 y = Mathf.Sqrt(Mathf.Pow(radius, 2) - Mathf.Pow(x, 2f));
42 a = new Vector3(transform.position.x - x, 0, transform.position.z + y);
43 Gizmos.DrawSphere(a, 0.05f);
44 x = radius * Mathf.Sin((-temp) * Mathf.Deg2Rad);
45 y = Mathf.Sqrt(Mathf.Pow(radius, 2) - Mathf.Pow(x, 2f));
46 a = new Vector3(transform.position.x - x, 0, transform.position.z + y);
47 Gizmos.DrawSphere(a, 0.05f);
48 }
49
50 }
51
52
53 public bool IsInRange( Transform target)
54 {
55 //攻击者位置指向目标位置的向量
56 Vector3 direction = target.position - transform.position;
57 //点乘积结果
58 float dot = Vector3.Dot(direction.normalized, transform.forward);
59 //反余弦计算角度
60 float offsetAngle = Mathf.Acos(dot) * Mathf.Rad2Deg;
61 return offsetAngle < angel * .5f && direction.magnitude < radius ;
62 }
63}
我们像之前一样的去测试一下.
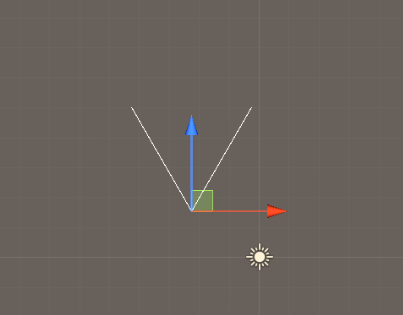
如果点在扇形内:
如果不在:
引申
那么如果是扇形的环呢?其实,我们只需要判断点到圆心的距离,是否是在环内就可以了.




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











