






 本文探讨了仿生机器人和生物机器人在遭受损伤后恢复方式的区别,提出生物机器人利用内在适应机制的潜力对仿生设计的启示,提倡设计分形机器人,即由机器人构成的机器人。
本文探讨了仿生机器人和生物机器人在遭受损伤后恢复方式的区别,提出生物机器人利用内在适应机制的潜力对仿生设计的启示,提倡设计分形机器人,即由机器人构成的机器人。
前言
人工智能和机器人的历史主要是受生物启发的历史。本文主要讨论了仿生机器人和生物机器人受伤之后恢复方式的不同,及其对仿生机器人设计的启发。
1 引言
机器学习研究人员和机器人专家长期以来一直向大自然寻求关于如何创建学习算法或具有自适应能力的机器的想法。 然而,仿生设计面临一些挑战。
第一,生物学中记载着成千上万的适应机制,选择哪一种来嵌入到算法和机器中并不是那么容易。
第二,一旦某种结构或者机制被选中,其在被应用的过程中,会以不同的尺度或者材料来工作。
第三,对于某些物理使用机制,目前的材料还不能实现或者达到这种适应行为。
这些挑战造成的结果就是一些结构和机制相对来说会得到更多的关注。
比如机器学习研究人员会过分关注神经机制,而机器人专家则倾向于关注物理结构。
2 仿生机器人
具身智能可以被看作是智能体如何改变自身的行为以适应不断变化的环境,也包括改变自身的身体。
一种特殊的适应机制在生物世界中无处不在,那就是从内部的损伤中恢复过来,比如损伤、受伤或截肢。
研究刚性、柔性和现在的生物机器人是如何对内部损伤作出适应,这是有指导意义的。
刚性机器人只有在损坏时才会采取适应行为(图 1a)。 正如[2]中所报道的,实现这一目标的一种方法是在损害之前和之后建立并更新内部模型,但不适当的行为可能会造成进一步的损害。
对于由空心硅胶立方体制成的软机器人[4],这种身体原则上允许机器人通过扩大相邻立方体的内部体积来“再生”截肢(图 1b)。 令人惊讶的是,机器人进化出替代策略,例如缩回剩余的肢体并从行走回归到蠕动运动。这展示了机器人能够像自然界的适应行为一样可以通过改变身体来适应。
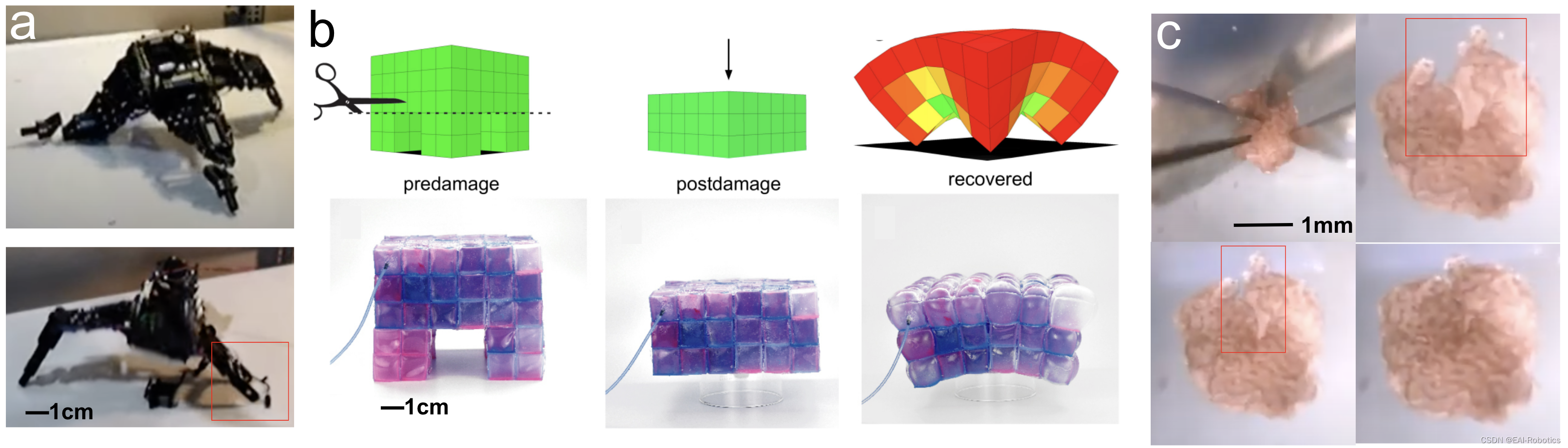
Figure 1. A rigid, soft, and biological robot recovering from injury.
a: A rigid robot’s only option, after losing an appendage is to adapt behaviorally by learning a compensating policy [2].
b: A soft robot may adopt behavioral and morphological changes to recover from injury, but it must learn how to do so [4].
c: This particular biological robot has inherited adaptive potential from the tissues out of which it is constructed: it spontaneously recovers from injury, requiring no learning [3].
3 生物机器人
通过破坏生物机器人的方法也研究了其对内部损坏的适应性。
相关研究已经证明了生物在发育过程中不仅能在激烈的干预中生存,而且还能利用这些干预促成适应性行为[1]。
与刚性或软体机器人不同,生物机器人是由智能材料制成的:细胞本身是复杂的机器,能够进行重要的感觉运动行为,并且具有包括记忆功能和“认知”功能。
例如,此类机器人内置有用的功能:当受到损坏时,我们发现人工智能设计的生物机器人可以自我修复(图1c)[3],这种能力超出了之前阐述的刚性[2]和软性[4] 机器人受伤适应能力。
4 重新审视仿生机器人
通常,当设计仿生机器人时,我们试图将生物结构或者机制引入到惰性材料中,比如金属,塑料盒和电子器件中。
当设计生物机器时,似乎选择了一种不同的方法更有用:就是直接利用生物材料中潜在的适应性机制。而不是设计制作一个缺乏适应性机制的机器。
比较生物机器人和仿生机器以及我们设计他们的方法,也许能够发现新的问题。
比如生物机器,从生物体上来说,他确实是一种新的生命形态,但是从细胞层面来说,它的皮肤细胞和自然动物的细胞并无差异。
那么,当其受到损伤时能够自行完成自愈似乎不足为奇。
这样的新观点能够帮助我们重新审视仿生机器人。
比如我们欣赏的生物体是由智能的机器(细胞)组成的智能(器官)而组成的引导我们创造出分形机器人(fractal robots):用由机器人组成的机器人来设计机器人。
总结
以上就是本文要讲的内容,本文简要翻译了作者的主要表达内容,用仿生和生物机器人从受损中恢复的案例,阐述了生物机器人对仿生机器人的设计的新启发:设计分形机器人(fractal robots)—— 用由机器人组成的机器人来设计机器人。
原文:Bongard J. From bioinspired to biological robots, and back again[C]//IOP Conference Series: Materials Science and Engineering. IOP Publishing, 2022, 1261(1): 012004.
Reference
[1] Douglas J Blackiston and Michael Levin. Ectopic eyes outside the head in xenopus tadpoles provide sensory data for light-mediated learning. Journal of Experimental Biology, 216(6):1031-1040, 2013.
[2] J. Bongard, V. Zykov, and H. Lipson. Resilient machines through continuous self-modeling. Science, 314:1118-1121, 2006.
[3] Sam Kriegman, Douglas Blackiston, Michael Levin, and Josh Bongard. A scalable pipeline for designing reconfigurable organisms. Proceedings of the National Academy of Sciences, 117(4):1853-1859, 2020.
[4] Sam Kriegman, StephanieWalker, Dylan Shah, Michael Levin, Rebecca Kramer-Bottiglio, and Josh Bongard. Automated shapeshifting for function recovery in damaged robots. In Proceedings of the Robotics: Science and Systems Conference, pages 28-37, 2019.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









