







本方法的最大优势在于,可以在机器变速的情况下,依然可以获取较好的精确度,也就是防止了过拟合(有的模型只能在特定条件的数据下才能达到高准确率,条件一变准确率就断崖式下降)
流程图:

实际的技术改进有两个:
1.CWTS
用于对数据进行预处理,二维的CWTS对信号进行拆分后,它能维持信号在时域和频域上的所有信息
然后根据机器的转速,对二维信号作适当的大小裁剪,裁剪后的数据才作为CNN的输入
CWT
CWT,即连续小波变换,能把一段振动信号分解为时域和频域信号,原理如下
傅里叶提出,任何周期函数都可以用正弦函数和余弦函数构成的无穷级数来表示(机器是依靠旋转工作的,必然拥有周期)
我们要做的,就是把这些信号所对应的三角函数找出来
在连续小波变换中,我们需要用到小波碰撞,小波的基函数为
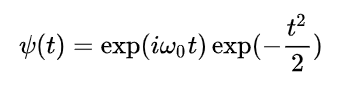
它由一个复三角函数乘上一个指数衰减函数构成的
其中,i代表常数,wo代表中心频率,t为自变量
复三角函数决定了函数的频率(指数函数没有频率和周期,因此三角函数就直接决定了函数频率)
指数衰减函数决定了函数的持续时间(指数函数参数不同衰减快慢不一样,衰减慢,持续时间就长,衰减快,持续时间就短)
进阶公式:

其中,b代表平移距离,a代表自变量的缩放
了解了小波基函数,就可以开始作连续小波变换了
连续小波变换的运算实际上是积分,是原始信号与小波基函数乘积后积分的过程
这里需要用到一个原理,不同三角函数相乘,频率一致时,得到的积分最大;频率相近,积分有数值;频率相差较大,积分基本为0
图示例子
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 8148
8148











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









