






1.课题概述
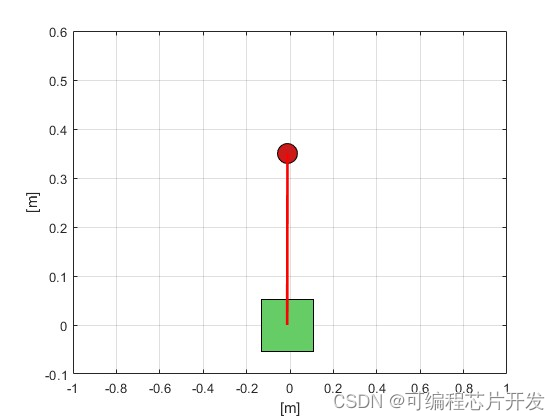
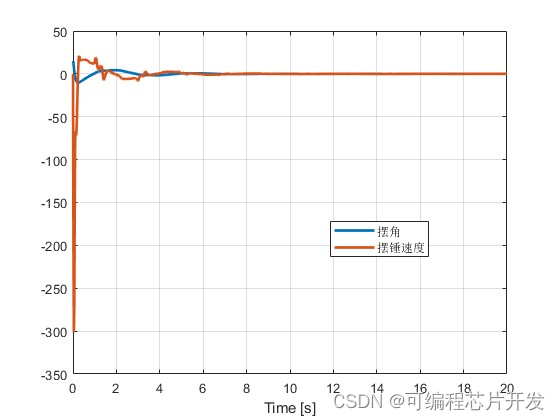
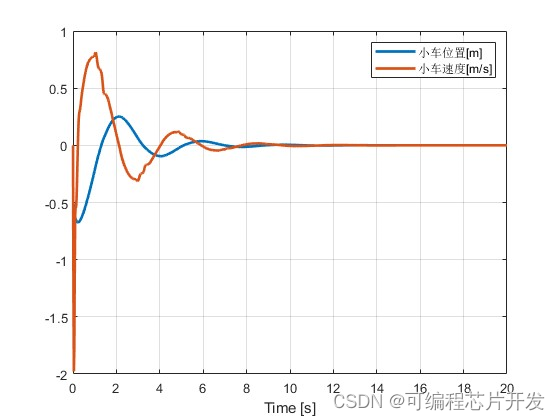
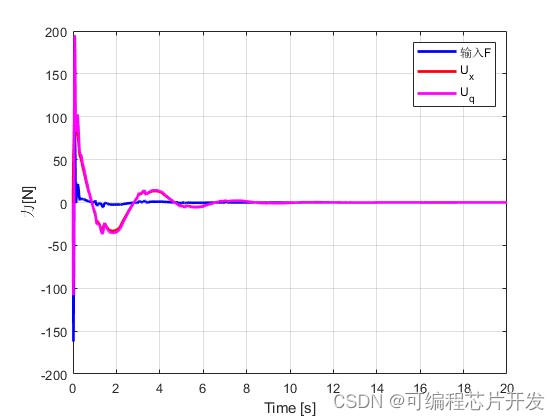
基于模糊控制算法的倒立摆控制系统,模糊规则,模糊控制器等通过MATLAB编程实现,通过模糊控制器对小车倒立摆平衡系统进行控制,输出倒立摆从不稳定到稳定的动画过程,最后输出小车,倒立摆的收敛过程。
2.系统仿真结果
3.核心程序与模型
版本:MATLAB2022a
4.系统原理简介
倒立摆是一个经典的控制问题,其目标是保持摆在垂直位置。由于其非线性、不稳定特性,传统控制方法往往难以实现理想效果。模糊控制作为一种先进的控制策略,能够处理不确定性和非线性问题,因此在倒立摆控制中具有显著优势。
4.1. 模糊控制算法原理
模糊控制是基于模糊集合理论、模糊语言变量及模糊逻辑推理的知识表示和推理方式。它模仿人的模糊思维方式和决策过程,不需要建立精确的数学模型。其核心组成包括:
模糊化:将输入量转化为模糊量,用隶属度函数表示。
μA(x)
其中,A 为模糊集合,x 为具体值,μA(x) 表示 x 对 A 的隶属度。
规则库:根据专家经验或数据,建立模糊规则,如“IF-THEN”规则。
模糊推理:基于规则库和当前模糊输入,进行推理得到模糊输出。
去模糊化:将模糊输出转化为精确量,常见的去模糊化方法有最大隶属度法、重心法等。
4.2. 倒立摆控制系统设计
对于倒立摆,我们定义其角度为 θ,角速度为 ω。控制目标是使得 θ 接近 0。设计模糊控制器如下:
输入:e=θ−θd e = θ - θ_de=θ−θd(角度误差)和 ec=ω−ωd ec = ω - ω_dec=ω−ωd(角速度误差)。
输出:u(控制力)。
模糊化:e 和 ec 的论域为 [-3, 3],u 的论域为 [-1, 1]。选择三角形或高斯型隶属度函数。
规则库:根据经验和试验,建立如下规则(仅举例):
如果 e 是负大且 ec 是负大,则 u 是正大。
如果 e 是零且 ec 是零,则 u 是零。
如果 e 是正大且 ec 是正大,则 u 是负大。















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









