







图的基本概念:
简单地说,图(graph)是一个用线或边连接在一起的顶点或节点的集合。
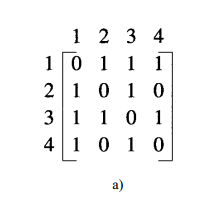
如下图:

其中a 是无向图,c是有向图。
完全图:


权和网的含义
在某些实际场景中,图中的每条边(或弧)会赋予一个实数来表示一定的含义,这种与边(或弧)相匹配的实数被称为"权",而带权的图通常称为网。如图 3 所示,就是一个网结构:

子图:指的是由图中一部分顶点和边构成的图,称为原图的子图。
图的常见存储结构:
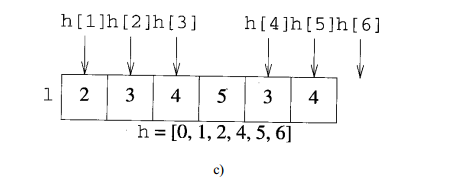
无向图和有向图最常用的描述方法都是基于邻接的方式:邻接矩阵,邻接压缩表和邻接链表。
邻接矩阵:
邻接压缩表:
邻接链表:

本篇文章使用的是邻接链表的方式来写的图
节点定义:
template<class T>
class ENode
{
public:
int vertex; //边的一端顶点
int adjVex; //边的另一端顶点
T weight; //边的权重
ENode<T> *next;
ENode() { next = NULL; }
ENode(int vertex, int adjvertex, T w, ENode<T> *nextArc)
{
this->vertex = vertex;
adjVex = adjvertex;
weight = w;
next = nextArc;
}
operator T() const { return weight; }
bool operator <(const ENode<T> &rhs) const
{
return this->weight > rhs.weight; //最小值优先
}
};连同图类定义:
目前学习BFS 与 DFS这部分可以先不看,这个是关于动态连通性后面的算法。
//自定义优先队列less的比较函数
template<class T>
class cmp
{
public:
bool operator()(const ENode<T> &a, const ENode<T> &b) const
{
return a.weight > b.weight;
}
};
//对于输入的“点-点”数据,求出动态连通性
class UnionFind
{
private:
int *id; //父链接数组,由触点索引
int *sz; //由触点索引的各个根节点所对应的分量的大小
int count; //连通分量的数量
public:
UnionFind(int N);
~UnionFind();
int Find(int p); //找p所在连通分量的根
bool Connected(int p, int q); //p和q是否在同一个连通分量里
int GetCount(); //返回连通分量
void Union(int p, int q); //将p和q连接起来
};
UnionFind::UnionFind(int N) :count(N)
{
id = new int[N];
sz = new int[N];
for (int i = 0; i < N; ++i) {
id[i] = i;
}
for (int j = 0; j < N; ++j) {
sz[j] = 1;
}
}
UnionFind::~UnionFind()
{
delete[] id;
delete[] sz;
}
//找p所在连通分量的根
int UnionFind::Find(int p)
{
while (p != id[p]) {
p = id[p];
}
return p;
}
//p和q是否在同一个连通分量里
bool UnionFind::Connected(int p, int q)
{
int pRoot = Find(p);
int qRoot = Find(q);
if (pRoot == qRoot) {
return true;
}
else {
return false;
}
}
//返回连通分量
int UnionFind::GetCount()
{
return count;
}
//将p和q连接起来
void UnionFind::Union(int p, int q)
{
int pRoot = Find(p);
int qRoot = Find(q);
if (pRoot == qRoot) { //已经在同个连通分量里,直接返回
return;
}
else { //将元素较少的连通分量连接到元素较多的连通分量上
if (sz[pRoot] < sz[qRoot]) {
id[pRoot] = qRoot;
sz[qRoot] += sz[pRoot];
}
else {
id[qRoot] = pRoot;
sz[pRoot] += sz[qRoot];
}
count--; //现有连通分量个数减1
}
}图的类定义:
//图类
template <typename T>
class Graph
{
public:
Graph(int mSize);
~Graph();
bool Exist(int u, int v) const; //边u->v是否存在
bool Insert(int u, int v, T w); //插入边u->v
bool Remove(int u, int v); //删去边u->v
void Reverse(); //得到反向图
void DFS(); //公有接口,深度优先搜索
void BFS(); //公有接口,宽度优先搜索
bool HasCycle(); //判断是否有环
stack<int> GetCycle(); //返回环
void CalReversePost(); //通过递归调用DFSForReversePost来求得
void TopoSort(); //拓扑排序
void TopoSortByDFS(); //用DFS来求拓扑序列
stack<int> GetReversePost(); //返回DFS中顶点的逆后序序列
void CalculateConnection(); //求图的强连通分量
int GetConnectedCount(); //得到强连通分量数
int ConnectionID(int v); //v所在的强连通分量的标识符(1~connectedCount)
void ShowConnection(); //打印强连通分量
void TarjanForConnection(); //用tarjan算法求强连通分量
void Prim(int v0); //普里姆算法求无向图最小代价生成树,外部接口
void Kruskal(); //克鲁斯卡尔算法求无向图最小代价生成树,外部接口
void Dijkstra(int v0); //迪杰斯特拉算法解决单源最短路径问题
void Floyd(); //弗洛伊德算法求所有顶点之间的最短路径
T GetWeight(int u, int v); //获得边u-v的权值
private:
ENode<T> **enodes;
Graph<T> *R; //用于存放反向图
int n; //顶点个数
int edges; //边的个数
int connectedCount; //强连通分量个数
int *id; //由顶点索引的数组,存放顶点所属的连通分量标识符
vector<int> *tarjanConnection; //通过tarjan算法得到的强连通分量
int connectedCountForTarjan; //在tarjan算法中使用的强连通分量个数
bool hasCycle; //是否有环
stack<int> cycle; //有向环中的所有顶点(如果存在)
stack<int> reversePost; //通过DFS得到的所有顶点的逆后序排列
UnionFind *uf; //用于Kruskal算法,用来判断最小生成树森林中是否会构成回路
void DFS(int v, bool *visited); //私有DFS,供递归调用
void BFS(int v, bool *visited); //私有BFS
void DFSForCycle(int v, bool *visited, bool *onStack, int *edgeTo); //用DFS思想来判断环
void DFSForReversePost(int v, bool *visited); //用DFS思想来求逆后序序列,用于求拓扑序列或者强连通分量
void DFSForConnection(int v, bool *visited); //用DFS思想来求强连通分量
void TarjanForConnection(int u, bool *visited, int *DFN, int *low, stack<int> *tarjanStack, bool *inStack, int &index); //用tarjan算法求强连通分量,其实也是运用了DFS思想
void ClearCycle(); //清空栈cycle中的记录
void ClearReversePost(); //清空栈reversePost中的记录
void CalInDegree(int *inDegree); //计算所有顶点的入度
void Prim(int v0, int *nearest, T *lowcost); //普里姆算法求无向图最小代价生成树,私有,内部调用
void Kruskal(priority_queue<ENode<T>> &pq); //克鲁斯卡尔算法求无向图最小代价生成树,私有,内部调用
void Dijkstra(int v0, int *path, T *curShortLen); //迪杰斯特拉算法解决单源最短路径问题,私有,内部调用
int FinMinLen(T *curShortLen, bool *mark); //Dijkstra算法的辅助函数,用于找出下一条最短路径的终点
};这里的图类包含了图的很多算法,本章先讲解最简单的部分,后期会慢慢更新。
图的构造(析构)函数:
template<typename T>
Graph<T>::Graph(int mSize)
{
n = mSize;
edges = 0;
connectedCount = 0;
hasCycle = false;
enodes = new ENode<T> *[n];
id = new int[n];
for (int i = 0; i < n; ++i) {
enodes[i] = NULL;
id[i] = 0;
}
uf = new UnionFind(n);
R = NULL;
tarjanConnection = new vector<int>[n]; //最多有n个
}
template<typename T>
Graph<T>::~Graph()
{
ENode<T> *p, *q;
for (int i = 0; i < n; ++i) {
p = enodes[i];
while (p) {
q = p;
p = p->next;
delete (q);
}
}
delete[] enodes;
delete[] id;
delete uf;
}Exist 函数:
//边u->v是否存在
template<typename T>
bool Graph<T>::Exist(int u, int v) const
{
if (u < 0 || v < 0 || u > n - 1 || v > n - 1 || u == v) {
return false; //输入参数无效
}
ENode<T> *p = enodes[u];
while (p && p->adjVex != v) {
p = p->next;
}
if (p) {
return true;
}
else {
return false;
}
}Insert函数:
//插入边u->v
template<typename T>
bool Graph<T>::Insert(int u, int v, T w)
{
if (u < 0 || v < 0 || u > n - 1 || v > n - 1 || u == v) {
return false; //输入参数无效
}
if (Exist(u, v)) {
cout << "Duplicate" << endl;
return false;
}
else {
//将新边结点插在由指针enodes[u]所指示的单链表最前面
ENode<T> *p = new ENode<T>(u, v, w, enodes[u]); //第4个参数是next值,代码采用前插入
enodes[u] = p;
edges++;
return true;
}
}删除函数:
//删去边u->v
template<typename T>
bool Graph<T>::Remove(int u, int v)
{
if (u < 0 || v < 0 || u > n - 1 || v > n - 1 || u == v) {
return false; //输入参数无效
}
ENode<T> *p = enodes[u];
ENode<T> *q = NULL;
while (p && p->adjVex != v) {
q = p;
p = p->next;
}
if (!p) {
cout << "Not exist." << endl;
return false;
}
if (p == enodes[u]) {
q = p;
enodes[u] = p->next;
delete (q);
edges--;
}
else {
q->next = p->next;
delete (p);
edges--;
}
return true;
}Reverse反向图:
template<typename T>
void Graph<T>::Reverse()
{
for (int i = 0; i < n; ++i) {
for (ENode<T> *w = enodes[i]; w; w = w->next) {
R->Insert(w->adjVex, i, w->weight);
}
}
}
宽度优先搜索:
宽度优先搜索也叫广度优先搜索 ,考察图12-19a 中的有向图。判断从顶点 1出发可到达的所有顶点的一种方法是首先确定邻接于顶点1的顶点集合,这个集合是 { 2 , 3 , 4 }。然后确定邻接于 { 2 , 3 , 4 }的新的顶点集合,这个集合是{ 5 , 6 , 7 }。邻接于{ 5 , 6 , 7 }的顶点集合为{ 8 , 9 },而不存在邻接于{ 8 , 9 }的顶点。因此,从顶点1出发可到达的顶点集合为{ 1 , 2 , 3 , 4 , 5 , 6 , 7 , 8 , 9 }。

广度搜索 BFS:
//广度或教宽度
template<typename T>
void Graph<T>::BFS()
{
bool * visited = new bool[n];
for (int i = 0; i < n; ++i) {
visited[i] = false;
}
for (int j = 0; j < n; ++j) {
if (!visited[j]) {
BFS(j, visited);
}
}
delete[] visited;
}template<typename T>
void Graph<T>::BFS(int v, bool * visited)
{
visited[v] = true;
cout << v << " ";
queue<int> myqueue;
myqueue.push(v); //进队列,
int s;
while (!myqueue.empty())
{
s = myqueue.front();
myqueue.pop();
for (ENode<T> * w = enodes[s]; w; w = w->next)
{
if (!visited[w->adjVex])
{
visited[w->adjVex] = true;
cout << w->adjVex << " ";
myqueue.push(w->adjVex);
}
}
}
} 简单的说明一下,首先visited 都是false,找到谁,就变成true,在下个节点到这里碰到了就不在寻找。然后采用队列的先进先出的顺序,把第一个节点的连接的全部放在去,然后依次取出来。这样就把数据遍历到了。也叫 BFS (Breadth-First
Search, BFS)算法。
深度优先搜索DFS:
深度优先搜索(Depth -First Search, DFS)是另一种搜索方法。从顶点 v 出发, D F S按如下过程进行:首先将v 标记为已到达顶点,然后选择一个与 v 邻接的尚未到达的顶点u,如果这样的u 不存在,搜索中止。假设这样的 u 存在,那么从u 又开始一个新的DFS。当从u 开始的搜索结束时,再选择另外一个与v 邻接的尚未到达的顶点,如果这样的顶点不存在,那么搜索终止。而如果存在这样的顶点,又从这个顶点开始 DFS,如此循环下去。
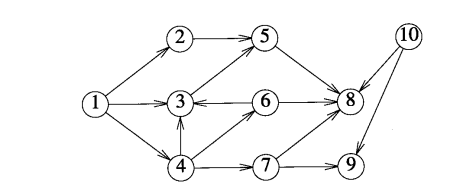
如果v = 1,那么顶点2 , 3和4成为u的候选。假设赋给 u的第一个值是2,到达2的边是( 1 , 2 ),那么从顶点2 开始一次DFS,将顶点2标记为已到达顶点。这时u 的候选只有顶点5,到达5的边是( 2 , 5 )。下面又从 5开始进行DFS,将顶点5标记为已到达顶点,根据边(5.8) 可知顶点8也是可到达顶点,将顶点 8加上标记。从8开始没有可到达的邻接顶点,因此又返回到顶点5,顶点5也没有新的u,因此返回到顶点2,再返回到顶点1。
这时还有两个候选顶点: 3和4。假设选中4,边( 1 , 4 )存在,从顶点 4开始DFS,将顶点 4标记为已到达顶点。现在顶点 3 , 6和7成为候选的u,假设选中6,当u = 6时,顶点 3是唯一的候选,到达3的边是( 6 , 3 ),从3开始D F S,并将3标记为已到达顶点。由于没有与 3邻接的新顶点,因此返回到顶点4,从4开始一个u = 7的DFS,然后到达顶点9,没有与9邻接的其他顶点,这时回到1,没有与1邻接的其他顶点,算法终止。
深度优先搜索:
//深度
template<typename T>
void Graph<T>::DFS()
{
bool *visited = new bool[n];
for (int i = 0; i < n; ++i) {
visited[i] = false;
}
for (int j = 0; j < n; ++j) {
if (!visited[j]) {
DFS(j, visited);
}
}
delete[] visited;
}template<typename T>
void Graph<T>::DFS(int v, bool * visited)
{
visited[v] = true;
cout << v << " ";
for (ENode<T> *w = enodes[v]; w; w = w->next) {
if (!visited[w->adjVex]) {
DFS(w->adjVex, visited);
}
}
}后面的部分会带大家一起来看看,让这些看起来比较难的,以最简单的方式去理解,需要源码的小伙伴们可以私信我。















 6087
6087











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









