







刘 斌 徐沪萍 王 磊
武汉理工大学物流工程学院 武汉 430063
摘 要:以配备液压破碎锤的反铲挖泥船反铲挖泥机为研究对象,简单介绍加装液压破碎锤方案,然后运用动力学理论和相关的动态仿真软件,通过建立反铲挖泥机的刚柔耦合模型,模拟计算获得反铲挖泥机作业过程中臂架结构的主要节点应力分布情况以及危险节点的动态响应应力历程,为反铲挖泥机加装破碎锤提供一定的参考。
关键词:反铲挖泥机;动力学;刚柔耦合;动态应力
中图分类号:TH213.4 文献标识码:A 文章编号:1001-0785(2018)07-0108-05
随着我国疏浚行业的逐步发展,与之配套的疏浚装备面临的考验也越来越多,目前在大型反铲挖泥机头部配备液压破碎锤进行水下破碎作业,能有效缩短施工周期,值得研究、推广。本文针对HB10000 型液压破碎锤结构体与挖泥机臂架系统本身连接的可行性进行了分析和研究,运用动力学理论以及相关的仿真软件(ADAMS)进行臂架结构的动力学分析。
1 反铲挖泥机加装破碎锤结构方案
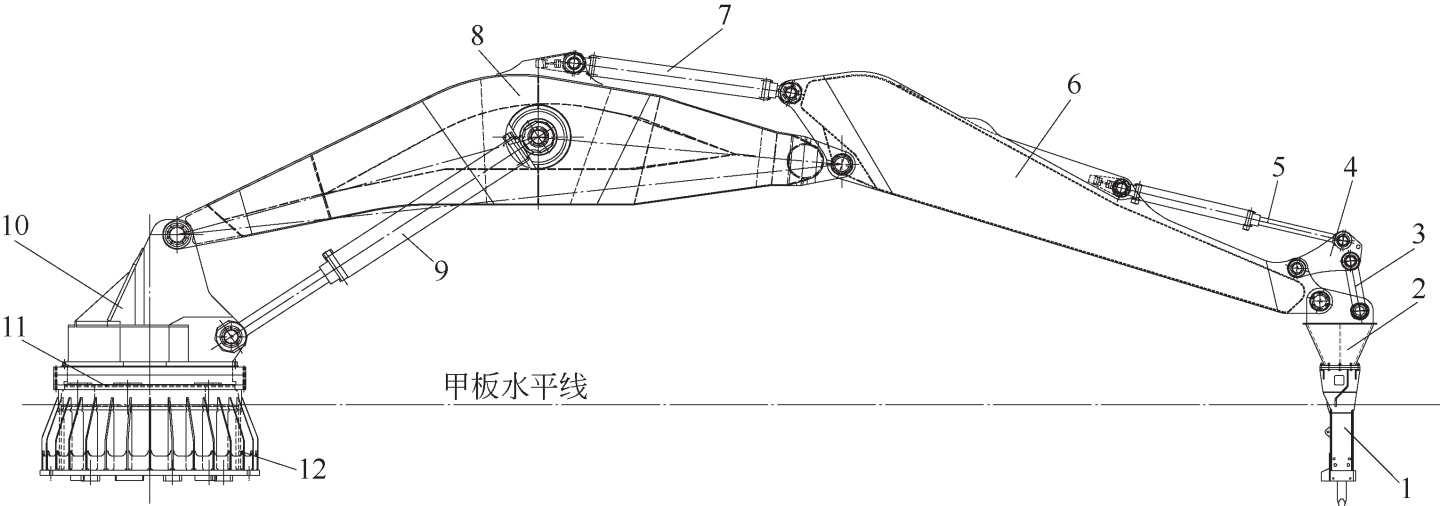
配备有液压破碎锤(HB10000 型)挖泥船挖泥机装配总图如图1 所示。新设计的破碎锤支承架结构为箱型结构,其与小臂头部和直连杆连接的销孔位置镶有耐磨衬套,连接销轴和端盖均采用原铲斗与小臂及直连杆连接的销轴。当需要破碎锤进行水下破岩作业时,拆卸铲斗连接销轴,安装破碎锤支承架,然后再安装破碎锤。
2 反铲挖泥机刚柔耦合虚拟样机
对于诸如大臂、小臂、连杆、破碎锤支承架需要重点研究关注其结构强度的构件,把它们作为柔体处理;液压缸的闭锁功能使液压缸皆处于固定状态,一般只需要在模型仿真分析中提取得到其作用力,因此,将液压缸组作为刚体处理;同时将破碎锤作为刚体处理。利用Ansys 建立有限元模型生成相应的MNF 模态中性文件,将对应的构件通过ADAMS接口读取后,添加约束关系。添加约束后的BA1100 反铲挖泥机刚柔耦合虚拟样机臂架系统虚拟模型[1,2] 如图2 所示。
1. 破碎锤 2. 破碎锤支承架 3. 直连杆 4. 铲斗连杆 5. 铲斗液压缸(2 个) 6. 小臂
7. 小臂液压缸(2 个) 8. 大臂 9. 大臂液压缸(2 个) 10. 转台 11. 回转支承 12. 支承圆筒
图1 加装破碎锤挖泥机装配总图
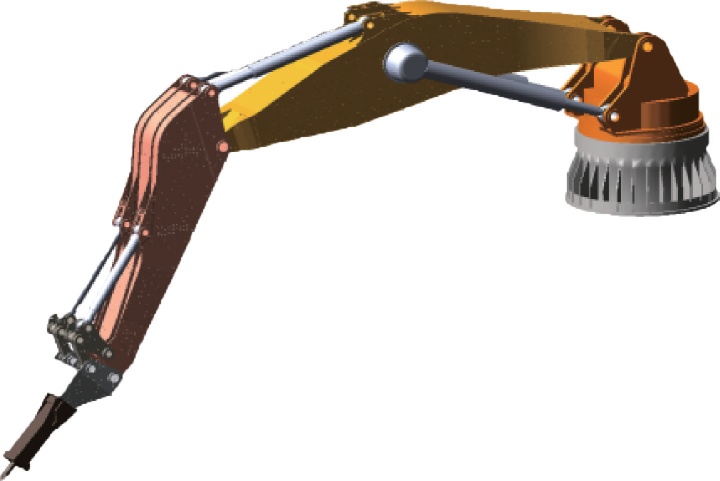
图2 反铲机臂架刚柔耦合虚拟样机
3 工况确定及载荷计算
3.1 工况分类
选择5 种典型工况进行分析:工况1 反铲机处于10 m 幅度、水下5 m 挖深位置进行凿岩作业,水位线以上的臂架结构受到蒲氏8 级风力作用,水位线以下的臂架结构受到水流作用(流速为3.3 m/s),考虑船舶横倾1°;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2961
2961











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









